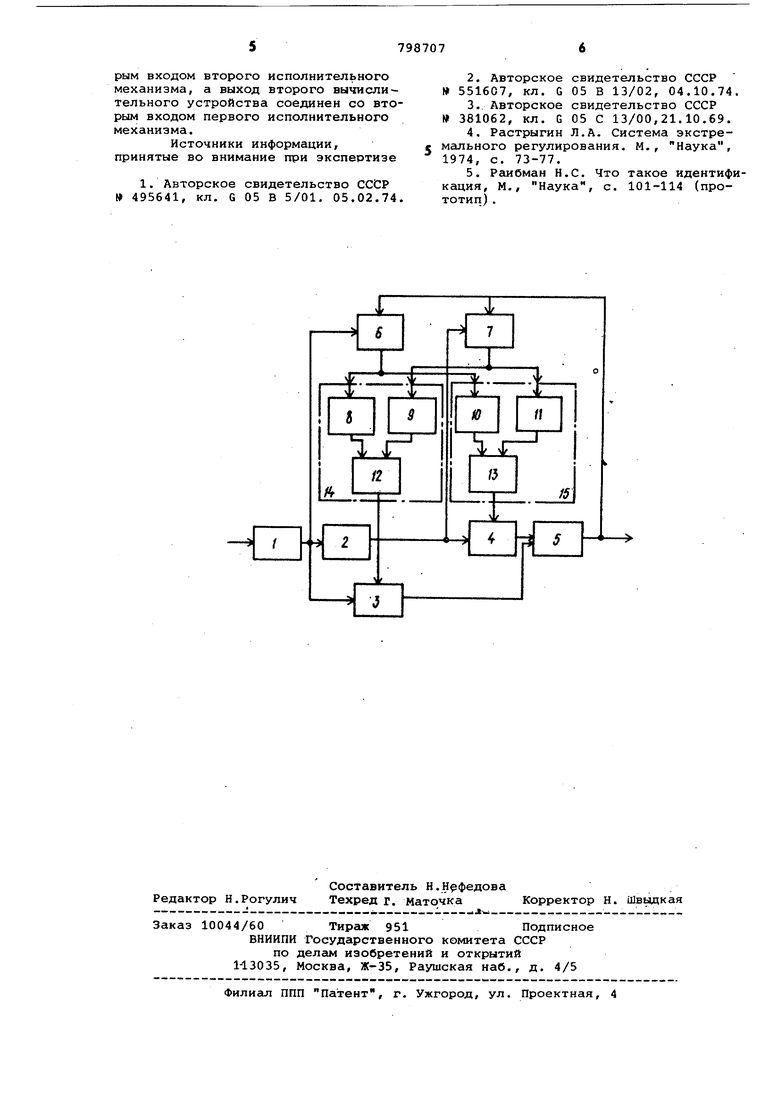
Изобретение относится к самонастраивающимся регуляторам с непрерывньш изменением параметров и может быть и использовано в металлургической, химической, нефтехимической и других отраслях промьнпленности, где имеются нестационарные объекты с запаздыванием или с большой инерционностью. Известры регуляторы, содержавшие настраиваемую часть, состоящую из параллельно соединенных пропорционал ного блока и интегратора, и контур самонастройки, состоящий из второго и третьего интеграторов, блоков умно жения, блоков сравнения,делителя и первого блока изменения масштаба, выход которого соединен с первым входом первого блока умножения,входы блока сравнения соединены соответственно через второй блок умножения с выходами первого и второго интеграторов и через третий блок умножения с выходами сумматрра и третьего инте гратора, а выход с первыми входами, четвертого и пятого блоков умножения, второй вход четвертого блока умножения соединен с выходом первого интегратора, а вмход - со входом первого блока изменения масштаба и со вторым входом первого блока умножения, выход которого через последовательно соединенные.второй интегратор и шестой блок умножения соединен с управляющим входом второго усили- теля, второй вход пятого блока умножения соединен с выходом сумматора, а его выход непосредственно и через второй блок изменения масштаба соединен соответствующими входами седьмо го блока умножения, выход которого через последовательно соединенные третий интегратор и делитель соединен со вторым входом шестого блока умножения и управляюгцим входом пеового усилителя l и t2 Однако известные устройства позволяют управлять инерционными объектами без запаздывания, но они неприменимы практически для инерционных объектов с запаздыванием, так как при этом резко ухудшается качество регулирования, а при некотором сочетании паргииетров устойчивого объекта вся замкнутая система автоматического регулирования оказывается неустойчивой . Известны устройства с применением регуляторов,содержащие последовательно соединенные вычислительное устройство (например, блок умножения), и исполнительный механизм (например, пропорциональный блок), и соединение входов вычислительного устройства со входом и выходом настраиваемой части регулятора, а выхода исполнительного механизма с управляющим входом настраиваемой части регулятора позволяет значитель но повысить быстродействие и уменьшить перерегулирование указанных регуляторов, и применить их для упра ления инерцнонньами объектами с запаз дыванием З и 4. Наиболее близким по технической сущности к предлагаемому является пропорционально-интегральный регулятор, содержащий измеритель рассогл сования, выход которого соединен с первым входом первого вычислительног устройства, через первый усилитель с первым входом сумматора, а через интегратор - с первым входом второго вычислительного устройства и входом второго усилителя, выход которого соединен со выходами первого и второго вычислительных устройств,выходы кото рых соединены с первыми входами,соот ветственно первого и второго исполнительных механизмов,выходы которых сое динены с управляющими входами,соответственно,первого и второго усилителей tsl. Цель изобретения - повышение быс родействия и уменьшение перерегулирования регулятора. Поставленная цель достигается тем что в регуляторе выход первого вычи лительного устройства соединен со в рым входом второго исполнительного механизма, а выход второго вычислительного устройства соединен со вто рым входом первого исполнительного механизма. На чертеже изображена функционал ная схема пропорционально-интеграль ного (пи) регулятора. Схема содержит измеритель 1 рассогласования, интегратор 2, первый и второй усилители 3 и 4, сумматор 5, -первые и вторые вычислительные устройства 6 и 7, элементы 8-11 изм нения масштабалсуммирующие элементы 12 и 13, первый и второй исполнител цые механизмы 14 и 15. Регулятор работает следующим обт5азом. Измеритель 1 рассогласования иМеряет отклонение регулируемого па раметра от требуемого значения. Сиг отклонекия интегрируется интегратором 2 и одновременно усиливается .пе вым усилителем 3. Проинтегрированны сигнал рассогласования усиливается вторым усилителем и суммируется в с маторе 5 с выходным сигналом первог усилителя 3. На выходе сумматора 5 формируетс сигнал управления, поступакяций на вт ые входы вычислительных устройств 6 и 7, в данном случае блоков умножения, где он перемножается с сигналом ассогласования в первом вычислительном устройстве бис пооинтегрированным сигнсшом рассогласования во втором вычислительном устройстве 7 Сигнал с первого вычислительного устройства 6 Поступает на первый вход первого исполнительного механизма 14 и на второй вход второго исполнительного механизма 15. Сигнал со второго вычислительного устройства 7 поступает на второй вход первого исполнительного механизма 14 и на первый вход второго исполнительного механизма 15. В качестве исполнительных механизмов 14 и 15 с пропорцио1чальными характеристиками применяют обычные операционные усилители. В исполнительных механизмах 14 и 15 сигналы масштабируются с помощью масштабирующих элементов 8 - 11 и суммируются с помощыЬ суммирующих элементов 12 и 13. Исполнительные механизмы 14 и 15 формируют сигналы управления, под действием которых происходит изменение коэффициентов усиления усилителей 3 и 4 в пропорциональной и интегральной частях регулятора. Коэффициенты передачи масштабирующих элементов 8-11 выбираются из условия минимума интегрального показателя качества переходного процесса. Предлагаемые отличительные особенности регулятора позволяют повысить быстродействие приблизительно на 25% и уменьшить перерегулирование приблизительно на 15% по сравнению с известными регуляторами. Формула изобретения Пропорционально-интегральный регулятор, содержащий измеритель рассогласования, выход которого соединен с первым входом первого вычислительного устройства, через первый усилитель с первым входом сумматора, а через интегратор - с первым входом второго вычислительного устройства и входом второго усилителя, выход которого соединен со вторым входом сумматора, выход которого соединен со вторыми входё1ми первого и второго вычислительных устройств, выходы которых соединены с первыми входами, соответственно, первого и второго исполнительных механизмов, выходы которых соеди:нены с управляющими входами, соответственно, первого и второго усилителей, отличающийся тем, что, с целью повышения быстродействия и уменьшения перерегулирования регулятора, в нем выход первого вычислительного устройства соединен со вто-г
рым входом второго исполнительного механизма, а выход второго вычислительного устройства соединен со вторым входом первого исполнительного механизма.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 495641, кл. G 05 В 5/01, 05.02.74.
2.Авторское свидетельство СССР
551607, кл. G 05 В 13/02, 04.10.74.
3.Авторское свидетельство СССР
381062, кл. G 05 С 13/00,21.10.69.
4.Растрыгин Л.А. Система экстремального регулирования. М., Наука, 1974, с. 73-77.
5.Раибман Н.С. Что такое идентификация, М., Наука, с. 101-114 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Пропорционально-интегральный регулятор | 1988 |
|
SU1624403A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР | 2017 |
|
RU2648516C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Устройство для регулирования состава формовочных растворов | 1973 |
|
SU467951A1 |
| Система управления наведением инерционного объекта | 2022 |
|
RU2795844C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| Устройство для управления инер-циОННыМ Об'ЕКТОМ | 1978 |
|
SU796788A1 |
