1
Изобретение относится к области станкостроения, а именно к устройствам для ограничения хода рабочих органов станка.
Известны устройства для ограничения хода рабочих органов станка, содержащие гибкий упор.
Недостатком известных устройств является возможность их использования только для остановки рабочего органа относительно малой массы, поскольку гибкий упор обладает малой энергоемкостью.
Описываемое устройство отличается от известного тем, что гибкий упор выполнен в виде .пакета плоских пластин заданной жесткости.
Контур плоских пластин выполпен в форме трапеции.
Пакет плоских пластин выполнен с возможностью предварительного напряжения, например, с помощью винтового механизма.
Указанные отличия позволяют повысить эффективность устройства.
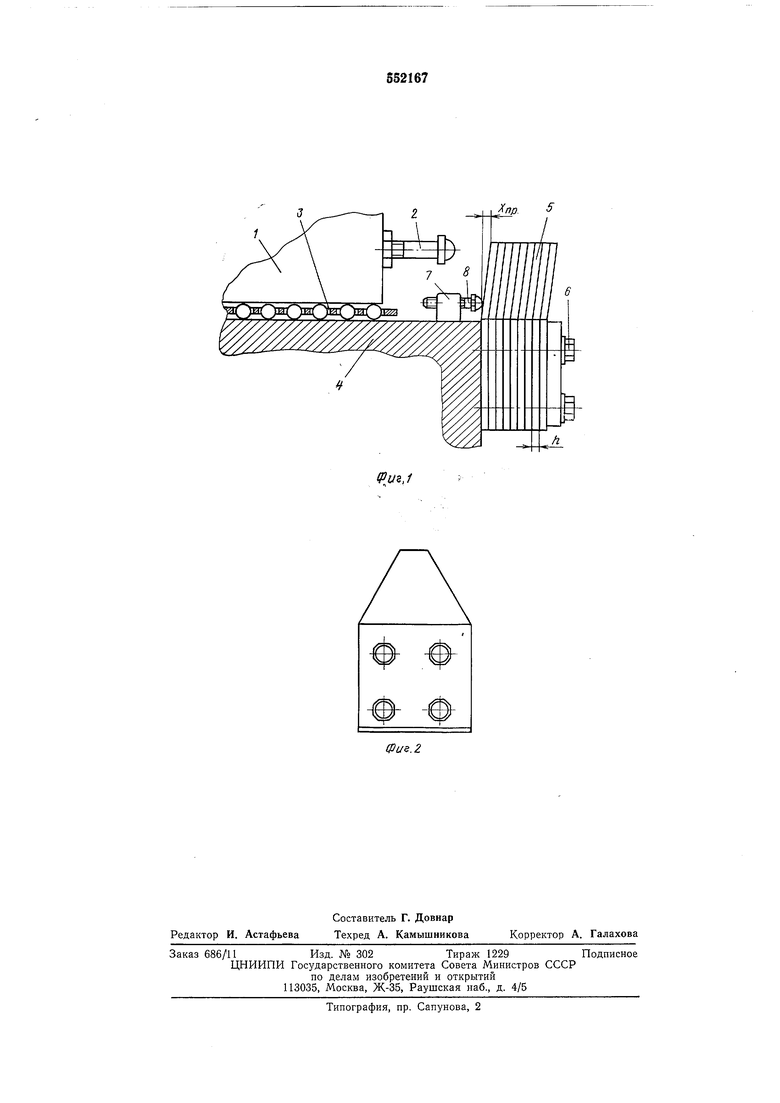
На фиг. 1 схематически изображено устройство; на фиг. 2 - плоская трапецеидальная пластина упора.
Подвижный орган 1 стапка, снабженный упорным винтом 2, установлен на направляющих качения 3.
На станине 4 укреплен гибкий упор, выполненный в виде пакета плоских пластин 5, непосредственно прикрепленный к станине, например, винтами 6. На станине 4 закреплен корпус 7, несущий упорный винт 8, создающий предварительную деформацию пакета пластин 5.
Требуемая жесткость упругого упора определена из закона сохранения энергии, который в данном случае может быть записан в виде:
/«f2СХ
- - + сх„уХ,
где т - приведенная к рабочему органу
масса привода совместно с массой
рабочего органа и обрабатываемой
детали; V - максимальная скрость перемещения
рабочего органа станка; с - жесткость упругого упора, Хщ, - величина предварительной деформации упругого упора; к - величина полной деформации упора.
Для обеспечения минимальных габаритов упора контур плоских пластин целесообразно выполнять в форме трапеции.
При подходе подвижного органа 1 стапка к гибкому упору винт 2 упирается в пакет пластин 5, который прогибается и поглощает энергию, запасенную рабочим органом и его
приводом к моменту взаимодействия с упором. Трение, возникающее между пластинами 5, является дополнительным потребителем энергии.
Кроме того, для уменьшения остановочного пути рабочего органа 1 плоские пластины 5 выполнены с возможностью предварительного напряжения.
Формула изобретения
1. Устройство для ограничения хода рабочих органов станка, содержащее гибкий упор, отличающееся тем, что, с целью повыщения эффективности устройства, гибкий упор выполнен в виде пакета плоских пластин заданной жесткости.
2.Устройство по п. if ЬтлЙ11ающееся тем, что, с целью обеспечения минимальных габаритов упора, контур плоских пластин выполнен в форме трапеции.
3.Устройство по п. 1, отличающееся тем, что, с целью уменьщения остановочного пути рабочего органа, пакет плоских пластин выполнен с возможностью предварительного напряжения, например, с помощью винтового механизма.
Источники информации, принятые во внимание при экспертизе
1. Авт. св. № 343816, кл. В 23q 1/18 от 15 10.04.70.
Хпр, 5

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи шлифовальной бабки | 1980 |
|
SU941167A2 |
| Предохранительное устройствоРАбОчЕй КлЕТи пРОКАТНОгО CTAHA | 1979 |
|
SU839637A1 |
| Устройство для ограничения хода рабочего органа станка | 1980 |
|
SU944862A1 |
| Станок для окорки и раскалывания лесоматериалов,ножевая головка для раскалывания лесоматериалов,нажимная плита механизма надвигания,окорочная фреза,механизм поворота лесоматериалов и загрузочное приспособление окорочного станка | 1981 |
|
SU1009765A1 |
| Способ групповой обработки деталей и устройство для его осуществления | 1988 |
|
SU1662810A1 |
| ПРОБИВНОЙ ПРЕСС | 1998 |
|
RU2137596C1 |
| Рабочий орган окорочного станка роторного типа | 1976 |
|
SU595157A1 |
| Подающее устройство стволообрабатывающего станка | 1976 |
|
SU582963A1 |
| Жесткий упор станка | 1980 |
|
SU948605A2 |
| Предохранительное устройство | 1981 |
|
SU1011288A1 |