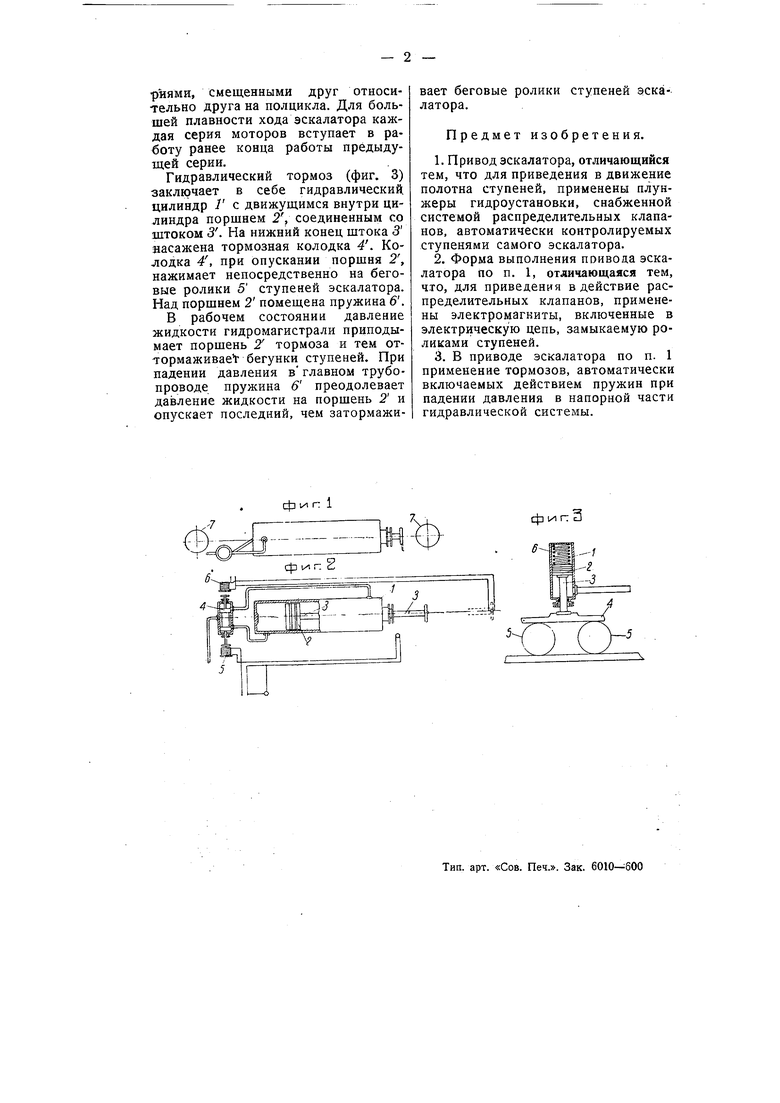
Г. С. Раппопорт Привод э Заявлено 19 октября 1938 Опубликовано Известны эскалаторы с механическим приводом. Недостатком подобных эскалаторов является необходимость применения роликовых цепей значительных сечений и из специальных дорогих сталей, поскольку в обычных конструкциях эскалаторов цепь у верхней звездочки несет на себе нагрузку всей рабочей ветви эскалатора. Предлагаемая конструкция привода эскалатора имеет целью устранение указанного недостатка путем использования гидравлического привода, состоящего из гидромоторов, последовательно расположенных вдоль полотна ступеней эскалатора. На чертеже представлена примерная форма выполнения гидромотора, причем на фиг. 1 представлен боковой вид; на фиг. 2 - план с частичным разрезом; на фиг. 3 - гидравлический тормоз. Гидромотор (фиг. 1 и 2) заключает в себе гидравлический цилиндр / с движущимся внутри цилиндра поршнем 2, соединенным со штоком 5. Ход поршня 2 гидромотора управляется золотниковым устройством 4, переключающим направление тока жидкости в цилиндр и обратно и и Н. М. Рейнов. калатора. П ..-:, да в НКТМаш за № 19408. ./..июля 1939 года. регулирующим скорость протекания: жидкости. Золотниковое устройство 4 приводится в действие двумя электромагнитами 5 и 6, включающими и выключающими гидромотор. На фиг. 1 показаны также толкаемые штоком 3 детали ступеней эскалатора, выполненные в виде родиков 7. Ролики 7 соединены со ступенями эскалатора так, что имеют возможность при прохождении самих ступеней под гидромоторами приподыматься и обходить последние. После прохождения над цилиндром /, ролик 7 вновь опускается и устанавливается на уровне штока 3. В это время движущаяся ступень эскалатора замыкает контакт электромагнита 5 и автоматически включает в работу гидромотор, поршень 2 которого своим штоком 3 и проталкивает ролик 7 вместе со ступенькой на длину своего хода. При достижении штоком 3 конечного положения включается контакт электромагнита и шток 3 возвращается в исходное положение пуска. Гидромоторы расположены под. всей лентой ступенек, через несколько ступенек друг от друга, ю работают последовательно двумя сериями, смещенными друг относительно друга на полцикла. Для большей плавности хода эскалатора каждая серия моторов вступает в работу ранее конца работы предыдущей серии.
Гидравлический тормоз (фиг. 3) заключает в себе гидравлический цилиндр Г с движущимся внутри цилиндра поршнем 2, соединенным со штоком 3. На нижний конец штока 3 насажена тормозная колодка 4. Колодка 4, при опускании поршня 2, нажимает непосредственно на беговые ролики 5 ступеней эскалатора. Над поршнем 2 помещена пружина 6.
В рабочем состоянии давление жидкости гидромагистрали приподымает поршень 2 тормоза и тем оттормаживае бегунки ступеней. При падении давления вглавном трубопроводе пружина 6 преодолевает давление жидкости на поршень 2 и опускает последний, чем затормаживает беговые ролики ступеней эскалатора.
Предмет изобретения.
1.Привод эскалатора, отличающийся тем, что для приведения в движение полотна ступеней, применены плунжеры гидроустановки, снабженной системой распределительных клапанов, автоматически контролируемых ступенями самого эскалатора.
2.Форма выполнения поивода эскалатора по п. 1, отличающаяся тем, что, для приведения в действие распределительных клапанов, применены электромагниты, включенные в электрическую цепь, замыкаемую роликами ступеней.
3.В приводе эскалатора по п. 1 применение тормозов, автоматически включаемых действием пружин при падении давления в напорной части гидравлической системы.
фиг
ф и п 3
