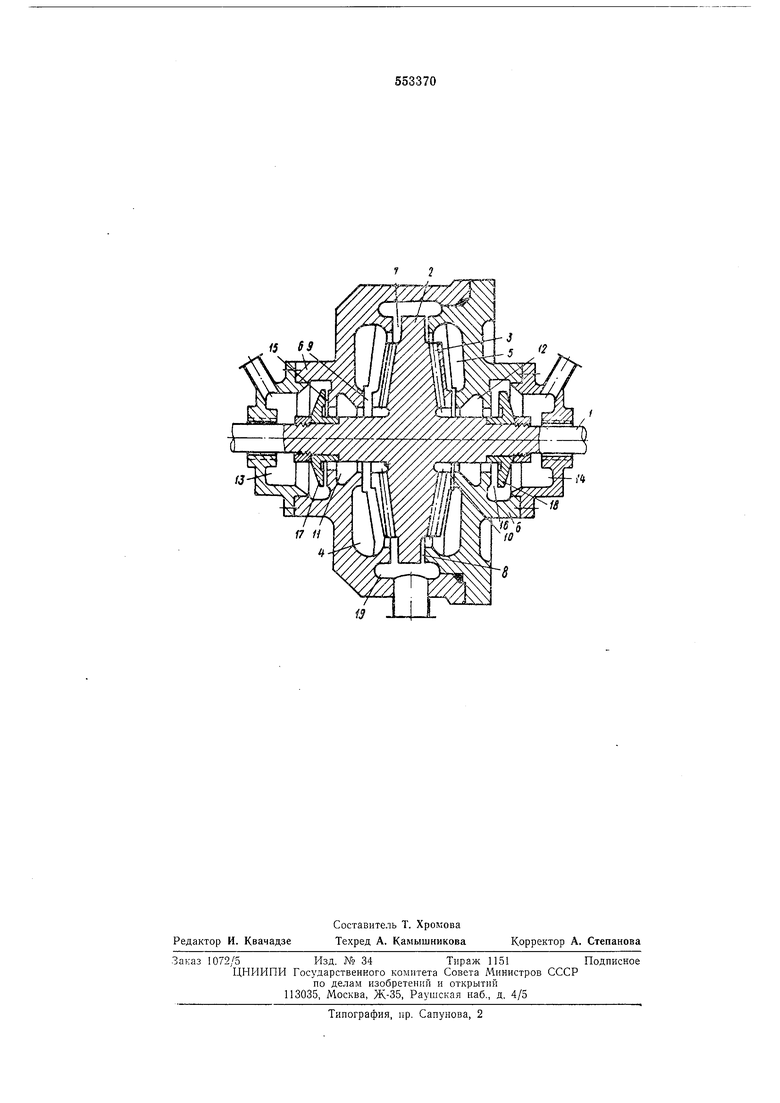
сущие камеры 4 и 5, расположенные по обе стороны пяты 2 и образованные торцовыми поверхностями пяты 2 и корпуса 6. Несущие камеры 4 и 5 имеют выходные щелевые дроссели 7 и 8, расположенные на периферии, и выходные щелевые дроссели 9 и 10, расположенные у ступицы ияты 2.
В теле корпуса 6 выполнены камеры всасывания 11 и 12, сообщающиеся с камерами 13 и 14 подвода жидкости через входные щелевые дроссели 15 и 16, образованные торцами неиодвижно закрепленых на валу 1 колец 17 и 18, стенками корпуса 6 и несущими камерами 4 и 5 через радиальные каналы 3 пяты 2 и выходные -щелевые дроссели 9 и 10.
В корпусе 6 выполнена камера 19 отвода рабочей жидкости. Несущие камеры 4 и 5 снабжены радиальными ребрами.
Работает опора следующим образом.
Осевое усилие, возникщее на валу 1 и действующее, например, слева направо, смещает пяту 2, образуя при этом зазоры 8 и 10 и 15 минимальными, а дроссели 7 и 9 и 16 максимальными (на чертеже показано рабочее положение опоры).
Рабочая жидкость из камеры подвода 14 проходит через щелевой (открытый) дроссель в камеру всасывания 12 и захватывается радиальными каналами 3 и нагнетается в несущую камеру 5, обеспечивая в ней высокое давление.
С другой стороны рабочая жидкость, поступающая из камеры подвода 13 в камеру всасывания II, дросселируется на щелевом (закрытом) дросселе 15, приводя к полной или частичной кавитации в радиальных каналах, т. е. практически давление в несущей камере 4 отсутствует.
Таким образом, в камерах 5 и 4 создается необходимый перепад давления, автоматически уравновещивающий возникающую на валу
осевую силу. Рабочая жидкость, протекающая через дроссели 8 и 7, отводится через камеру 19 в систему питания для охлаждения, а жидкость, протекающая через дроссели 10 и 9, захватывается вновь радиальными каналами пяты.
Дросселирование рабочей жидкости на входе обеспечивает высокую эффективность кавитации, позволяя получить перепад давления
в несущих камерах до 90-93% (у известных подщипников этот перепад составляет 70- 73%).
При изменении направления осевого усилия положение зазоров меняется и необходимый
перепад давлений устанавливается уже между камерами 4 и 5.
Формула изобретения
Двусторонняя осевая опора, содержащая
смонтированную на валу пяту в виде ступенчатого диска, имеющую два ряда радиальных каналов для подачи рабочей жидкости в несущие камеры, расположенные по обе стороны пяты, камеру отвода рабочей жидкости, соединенную с несущими камерами через выходные щелевые дроссели, образованные торцовыми поверхностями периферийной части пяты и корпуса, а также камеры подвода рабочей жидкости, отличающаяся тем,
что, с целью повыщения несущей способности, опора снабжена камерами всасывания, расположенпыми по обе стороны пяты, выполненными в теле корпуса и сообщающимися с камерами подвода рабочей жидкости через входные щелевые дроссели, образованные торцами неподвижно закрепленных на валу колец и стенками корпуса, а также с несущими камерами через радиальные каналы пяты и дополнительные выходные щелевые
дроссели, ограниченные торцами пяты у ступицы и корпуса.
/4
| название | год | авторы | номер документа |
|---|---|---|---|
| Двусторонняя осевая опора | 1976 |
|
SU584123A1 |
| Двусторонняя осевая опора | 1980 |
|
SU966348A1 |
| Двусторонняя осевая опора | 1980 |
|
SU1035312A2 |
| Гидростатическая опора | 1972 |
|
SU456924A1 |
| Гидравлическое устройство для создания осевой нагрузки | 1972 |
|
SU564561A1 |
| ТЕПЛОГЕНЕРАТОР ПРИВОДНОЙ КАВИТАЦИОННЫЙ | 1999 |
|
RU2201562C2 |
| РОТОРНАЯ МАШИНА | 2000 |
|
RU2170835C1 |
| ДВУСТОРОННЯЯ ОСЕВАЯ ОПОРА | 1971 |
|
SU314935A1 |
| Гидростатическая опора | 1990 |
|
SU1751501A1 |
| ТУРБОНАСОСНЫЙ АГРЕГАТ И СПОСОБ ПЕРЕКАЧИВАНИЯ ХОЛОДНОЙ, ГОРЯЧЕЙ И ПРОМЫШЛЕННОЙ ВОДЫ | 2013 |
|
RU2511970C1 |