1
Изобретение предназначено для использования в пишущих и им подобных машинах, где требуется выполнение дискретных перемещений, поступательно движущихся частей с дифференцированным шагом.
Известны два типа устройств для дифференцированного перемещения каретки. Одно из них основано на нспользовании шагового двигателя 1, которым осуществляется одновременно и привод каретки и задание требуемой длины шага.
Однако использование шагового двигателя одновременно в режиме привода довольно тяжелой каретки и в режиме управления длиной шага приводит к необходимости использования двигателей относительно больших мощностей с тяжелым ротором. Все это приводит к снижению скоростей перемещения каретки до уровня более низкого, чем уровень, о-беснечиваемый устройствами для дифференцированного перемещения каретки второго, «традиционного типа.
Устройства этого тина содержат пружинный привод каретки, связанный с ее ходовым винтом, и спусковой механизм, связанный со средством для его управления 2. Средство для управления спусковым механизмом выполнено в виде барабана с вмонтированными равно расположенно по окружности штифтовыми стопорами, которые имеют возможность
перемещаться параллельно оси барабана, выдвигаясь или утапливаясь относительно его торцовой поверхности. Каждый из этих стопоров, будучи выдвинутым, пересекает зону
движения спускового механизма, благодаря чему длина каждого шага неремещения каретки задается выдвижением того или иного стопора, ограничивающего длину свободного пробега спускового механизма.
Количество вариантов длин шагов яри этом жестко ограничено количеством стопоров в имеющемся наборе. С увеличением количества требуемых вариантов длин шагов возрастают в размерах и резко усложияются сами
устройства, что не оправдывается ни технически, ни экономически.
Неизбежные при остановке каретки ударные нагрузки приводят к возникновению динамических неточностей отработки шага и
большим усилиям в механизмах, что ограничивает быстродействие машины и вынзждает вводить в ее состав специальные устройства, регулирующие отскок каретки. Большое количество сложных мех нических связей, обеспечивающих установку нужного стопора но команде с узла нрограммы (клавиатуры, перфоленты и т. д.), снижает надежность машины.
С целью упрощения устройства и повышения его надежности в предлагаемом устройстве спусковой механизм выполнен в виде одинарной роликовой муфты свободного хода двустороннего действия, обойма которой закреплена неподвижно, звездочка связана с ходовым винтом, а средство для управления сиусковым механизмом представляет собой И1аговый электродвигатель, на роторе которого закреплена вилка роликовой муфты.
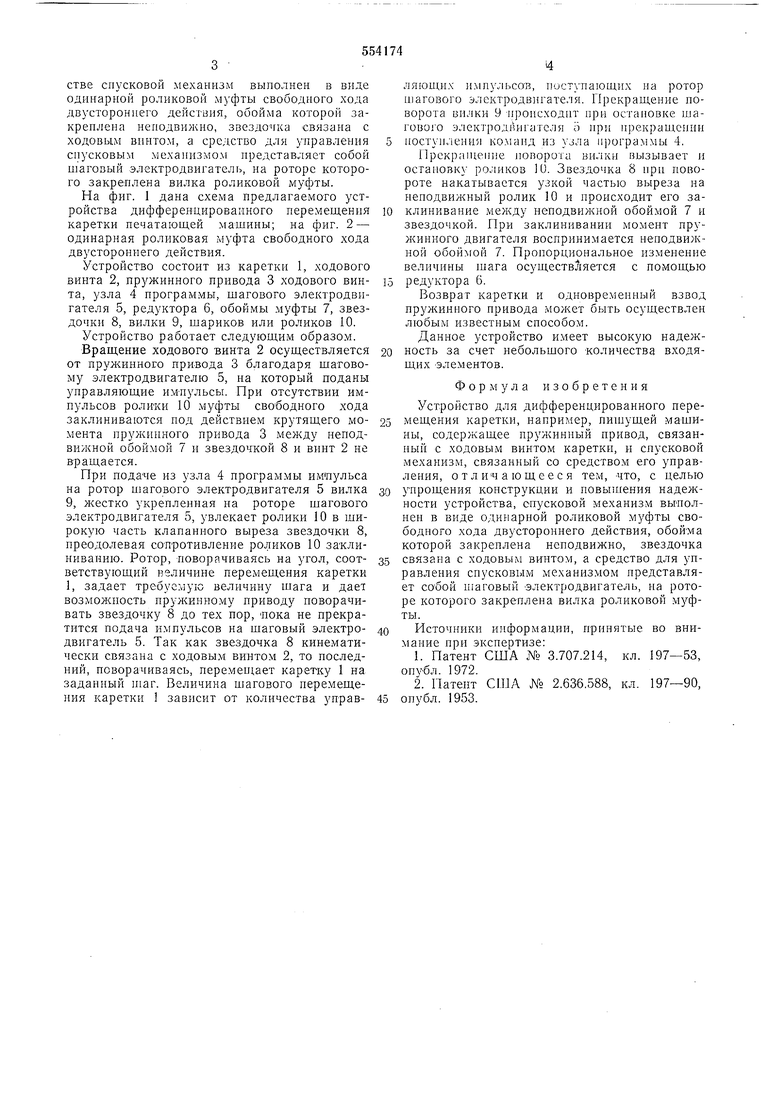
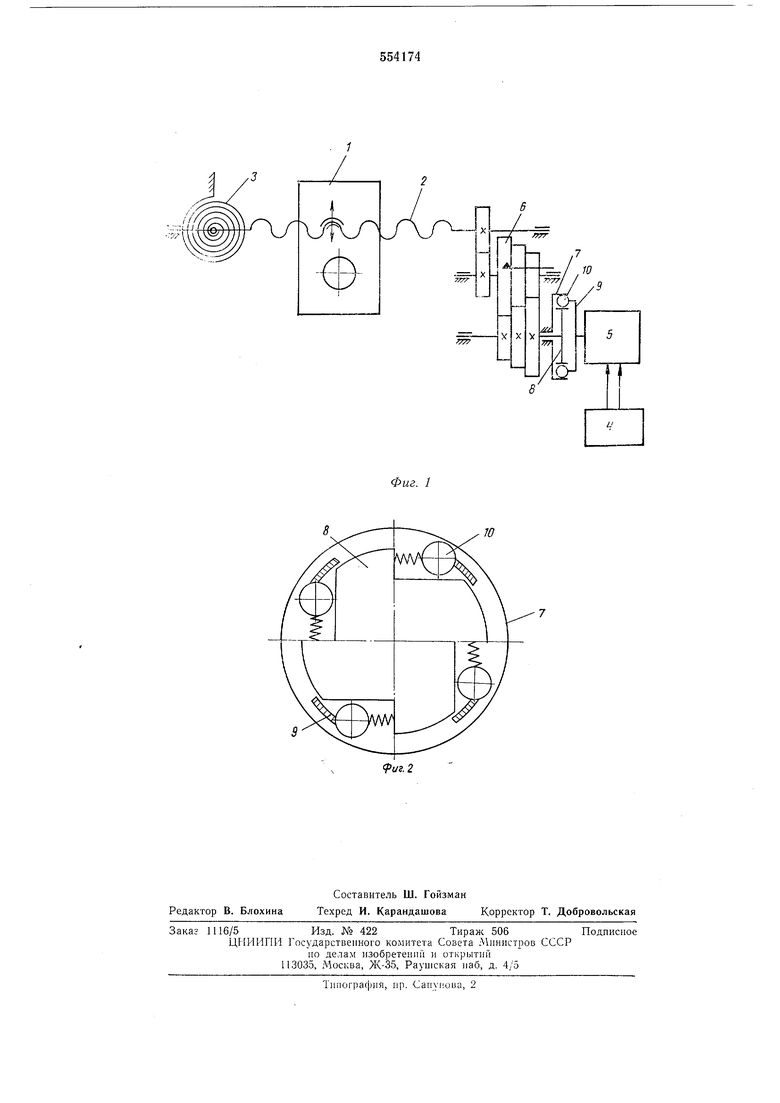
На фиг. 1 дана схема предлагаемого устройства дифференцированного перемещения каретки печатающей машины; на фиг. 2 - одинарная роликовая муфта свободного хода двустороннего действия.
Устройство состоит из каретки 1, ходового винта 2, пружинного привода 3 ходового винта, узла 4 программы, шагового электродвигателя 5, редуктора 6, обоймы муфты 7, звездочки 8, вилки 9, гиариков или роликов 10.
Устройство работает следующим образом.
Вращение ходового винта 2 осуществляется от прулшнного привода 3 благодаря шаговому электродвигателю 5, на который поданы )шравляющие импульсы. При отсутствии импульсов ролики 10 муфты свободного хода заклиниваются под действием крутящего момента пружинного привода 3 между неподвижной обоймой 7 и звездочкой 8 и винт 2 не вращается.
При подаче из узла 4 программы импульса на ротор шагового электродвигателя 5 вилка 9, жестко укрепленная на роторе шагового электродвигателя 5, увлекает ролики 10 в широкую часть клапанного выреза звездочки 8, преодолевая сопротивление роликов 10 заклиниванию. Ротор, поворачиваясь на угол, соответствующий величине перемещения каретки 1, задает требуемую величину шага и дает возможность пружинному приводу поворачивать звездочку 8 до тех пор, яока не прекратится подача импульсов на шаговый электродвигатель 5. Так как звездочка 8 кинематически связана с ходовым винтом 2, то последний, поворачиваясь, перемеп1ает каретку 1 на заданный niar. Величина шагового перемещения каретки 1 зависит от количества управляющих пмпульсоВ, поступающих на ротор HiaroBoro электродвигателя. Прекращение поворота вилки 9 происходит при остаповке шагового электродДигателя о при ирекрапгонии поступления команд из узла программы 4.
Прекращение попорота вилки вызывает и остановку роликов 10. Звездочка 8 при повороте накатывается узкой частью выреза на неподвижный ролик 10 и происходит его заклинивание между неподвижной обоймой 7 и звездочкой. При заклинивании момент пружинного двигателя воспринимается неподвижной обоймой 7. Пропорциональное изменение величины шага осуществляется с помощью редуктора 6.
Возврат каретки и одновременный взвод пружииного привода может быть осуществлен любым известным способом.
Данное устройство имеет высокую надежность за счет небольшого количества входящих -элементов.
Формула изобретения
Устройство для дифференцированного перемещения каретки, например, пии:ущей машины, содержащее пружинный привод, связанный с ходовым винтом каретки, и спусковой механизм, связанный со средством его управления, отличающееся тем, что, с целью упрощения конструкции и повышения надежности устройства, спусковой механизм выполнен в виде одинарной роликовой муфты свободного хода двустороннего действия, обойма которой закреплена неподвижно, звездочка связана с ходовым винтом, а средство для управления спусковым механизмом представляет собой п аговый -электродвигатель, па роторе которого закреплена вилка роликовой муфты.
Источники информации, принятые во внимание при экспертизе:
1.Патент США № 3.707.214, кл. 197-53, опубл. 1972.
2.Патент США № 2.636.588, кл. 197-90, опубл. 1953.
Н,7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| КАРЕТКА ДЛЯ ПОДДЕРЖАНИЯ РАБОЧИХ ОРГАНОВ | 1994 |
|
RU2101151C1 |
| Устройство для подачи электрода-инструмента электроэрозионного станка | 1987 |
|
SU1472195A1 |
| Станок для шаговой подачи листовой резины на обработку | 1972 |
|
SU438547A1 |
| ПОДВИЖНЫХ ОРГАНОВ СТАНКОВ12 | 1973 |
|
SU366056A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯРУКОЯТКОЙ | 1972 |
|
SU334037A1 |
| Устройство для сборки бесконечных резинотросовых лент | 1988 |
|
SU1803329A1 |
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| ПРИВОД КООРДИНАТНЫХ ПЕРЕМЕШЕНИЙ СТАНКА С ЧИСЛОВЫМ ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1972 |
|
SU346036A1 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
Ю
