Изобретение о,т1Нооится к области станкостроения.
Приводы координатных перемещений подвижных органов станков с программным управлением для сверления печатных плат, исполНИтельным органом которых являются 1/п-оборотные муфты, имеющие п выступов, управляемые одним электромагнитом для каждого направления вращения. Однако известные приводы не обеспечивают высоких скоростей перемещения рабочего органа при малых шагах перемещения.
Цель изО|бретения - повышение скорости перемеп ения рабочего, ротора.
Достигается это следующим образом.
Оборотная роликовая реверсивная .муфта, непосредственно посаженная на ходовом винте l/uj управляется п/2 диаметрально расположенными электромагнитами, соединенными с устройством управления, которое связанно с угловым датчиком, установленным на том же ходовом винте. При этом поводковая вилка 1/п-оборотной муфты снабжена двумя выступами-упорами, расположенными под углом
г
а - относительно один другого. п
Такая конструкция 1/л пОЗволяет увеличить скорость вращения при малых шаговых перемещениях рабочего органа.
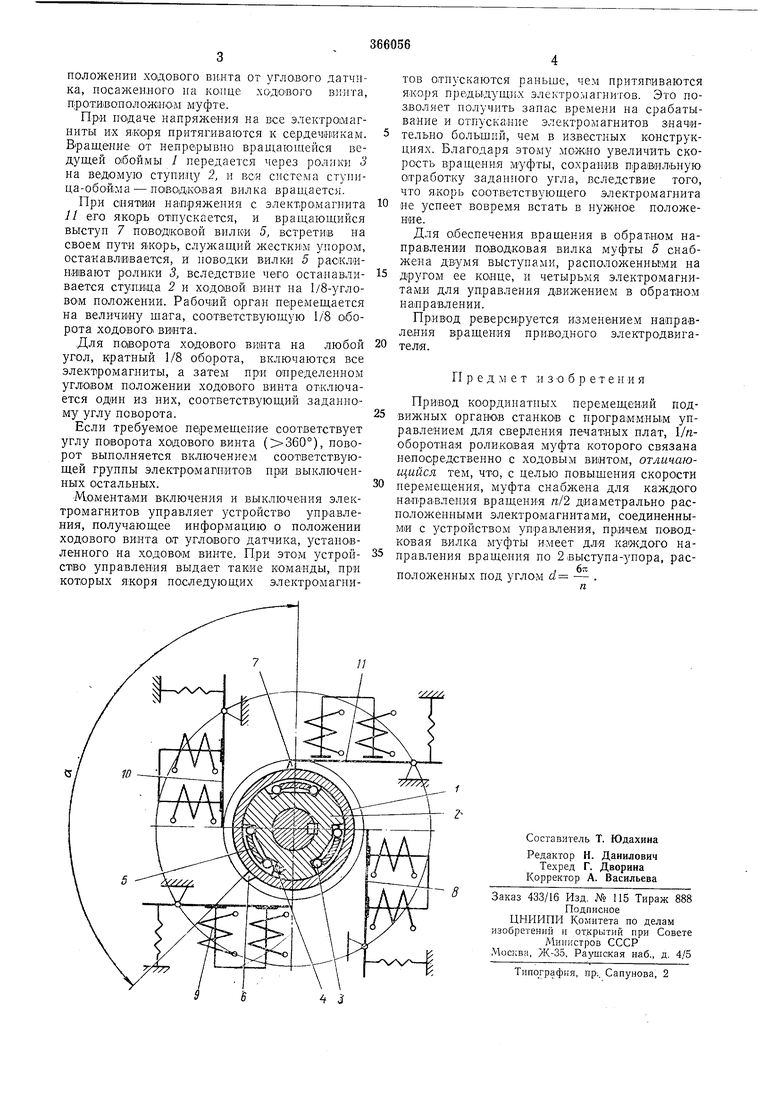
На чертеже изображена оборотная роликовая реверсивная муфта с электромагнитами управления 1/8.
Ведущая обойма 1, связанная с реверсивным электродвигателем, свободно сидит на
Конце ходового винта, а ступица 2 с вырезами посал ена на щпонке. В вырезах ступицы 2 расположены ролики 3, которые под действием пружин 4 прижимаются к внутренней поверхности обоймы 1. На конце ходового винта свободно укреплена поводковая вилка 5, торцовые поводки которой в.ходят в пространство между роли|Ками. Поводковая вилка 5 имеет два выступа 6 и 7, расположенные
под углом d которые упиграются в якоря электромагнитов 8-1, соединенных с устройством управления. Стол перемещается по иаправляющил посредством передачи винтгайка.
На конце ходового винта, противоположном муфте, установлен угловой датчик, связа.нный с устройством управления. Ходовой винт, реверсивный электродвигатель, стол, устройство управления и угловой датчик на чертеже не показаны.
Устройство работает следующим образоцм. Обойма / получает вращение от реверсивного электродвигателя. От ведущей обоймы 1 вращение передается ведомой ступице 2, посаженной пепосредственно на ходовой винт через ролики 3, заключенные усилием пружин 4, между обоймой и ступицей. Ступицы 2 п ходовой винт останавливают в заданном угловом положении с помощью поводковой вилки 5, выступы 6 и 7 которой упираются в якоря электромагнитов 8-11. 1Электромагниты включаются и выключаются устройством управления, которое получает информацию о
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД КООРДИНАТНЫХ ПЕРЕМЕШЕНИЙ СТАНКА С ЧИСЛОВЫМ ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1972 |
|
SU346036A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ОБГОННОЙ МУФТОЙ | 1966 |
|
SU184033A1 |
| МУФТА ОБГОНА | 1968 |
|
SU219342A1 |
| Механизм останова | 1987 |
|
SU1448144A1 |
| КОЛЕННЫЙ ШАРНИР ЭКЗОСКЕЛЕТОНА | 2012 |
|
RU2506932C1 |
| УСТРОЙСТВО СВЕРЛИЛЬНО-ФРЕЗЕРНОЕ УСФ | 2006 |
|
RU2309821C1 |
| Устройство для сборки и сварки | 1983 |
|
SU1207697A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОГРЕЙДЕРА | 1997 |
|
RU2133317C1 |
| Устройство для измерения кинематической погрешности цилиндрических зубчатых колес | 1987 |
|
SU1612204A1 |
| Автоматическая коробка передач | 1977 |
|
SU1060509A1 |
