(54) ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИСКУССТВЕННОЙ КИСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод искусственной кисти | 1978 |
|
SU683734A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДОМКРАТ | 2009 |
|
RU2412106C1 |
| Протез кисти | 1979 |
|
SU852325A1 |
| Гидроцилиндр | 1983 |
|
SU1096412A1 |
| Протез на культю кисти | 1978 |
|
SU689671A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| Муфта предельного момента | 1976 |
|
SU605047A2 |
| Приводной механизм ленточного перфоратора | 1977 |
|
SU739571A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОДЪЕМНИК | 1995 |
|
RU2092426C1 |
| Односхватный электромеханический протез кисти | 2020 |
|
RU2762842C1 |
Изобретение относится к области медицинской техники, а именно к механизмам протезов верхних конечностей.
Известен электромеханический привод искусственной кисти, содержащий электродвигатель, редуктор, несамотормозящуюся винтовую пару с гайкой и винтом и узел фиксащ1и в виде механизма свободного хода 1 .
Целью изобретения является упрощение конструкции и уменьщение габаритов протеза.
Это достигается тем, что узел фиксации выполнен в виде подвижного стакана, установленного на шарикоподпшпнике, контактирующего своим тор)цом с корпусом редуктора и связанного с винтом при помощи механизма свободного хода, расположенного внутри стакана. Цричем механизм свободного хода вьшолнен в виде эксцентрика, неподвижно расположенного на винте, и роликов, установленных с возможностью заклинивания между эксцентриком и стаканом.
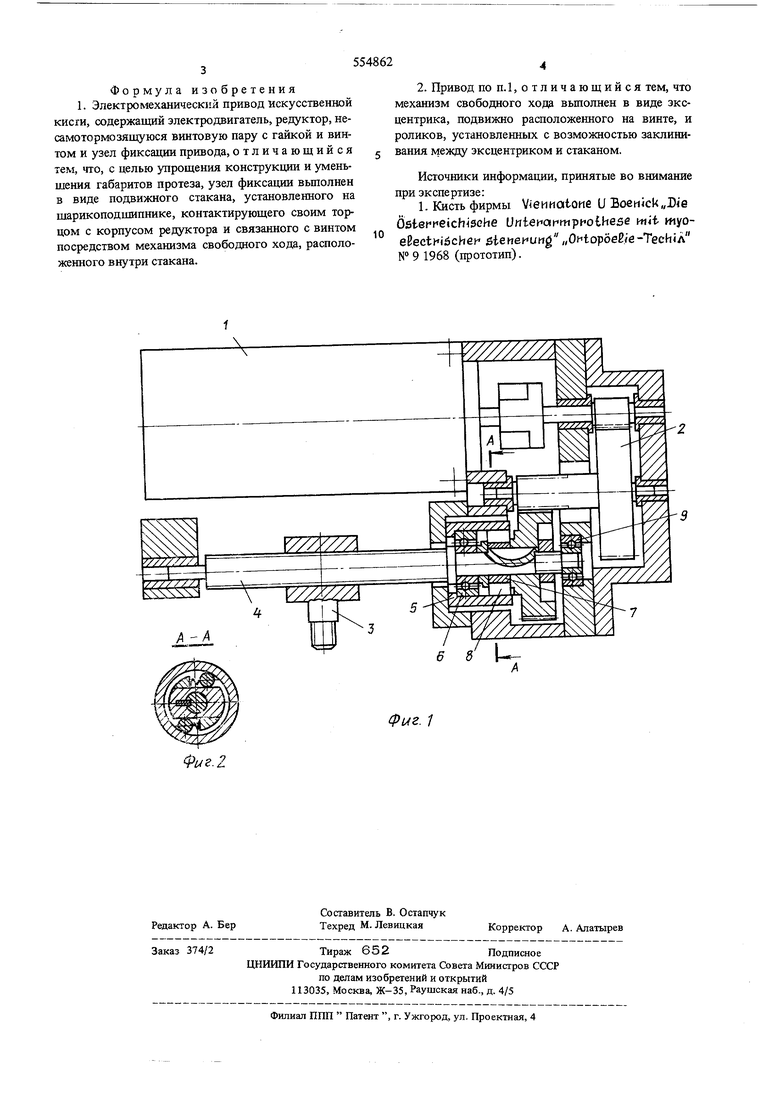
На фиг. 1 изображен электромеханический привод искусственной кисти в разрезе; на фиг. 2 - сечение по А-А на фиг. 1.
Устройство содержит электродвигатель 1, редуктор 2, несамотормозящую винтовую пару с гайкой 3 и винтом 4, узел фиксации, вьшолненный в виде подвижного стакана 5, установленного на щарикоподщипнике 6, контактирующего своим торцом и корпусом редуктора 2 и связанного с винтом 4 при помощи механизма свободного хода, расположенного внутри стакана 5 и вьшолненного в виде эксцентрика 7, неподвижно расположенного на винте 4, и роликов 8, установленных с возможностью заклинивания между эксцентриком 7 и стаканом 5.
Устройство работает следующим образом.
При вращении винта 4 в направлении, соответствующем сближению пальцев кисти и передачи мощности от двигателя 1 к винту, последний в стакане 5 благодаря эксцентрику 7 свободно прокрзд1ивается и опорным шарикоподшипником является подщипник 6. При передаче мощности от винта к двигателю и вращении винта в обратном направлении винт вращается вместе со стаканом 5 и опорным щарикоподщипником является подщипник скольжения, образованньш торцом стакана. При раскрытии пальцев с помощью двигателя опорным подщипником является щариковый подщипник 9.
Формула изобретения 1. Электромеханический привод искусственной кисги, содержащий электродвигатель, редуктор, несамотормозящуюся винтовую пару с гайкой и винтом и узел фиксации привода, отличающийся тем, что, с целью упрощения конструкции и уменьшения габаритов протеза, узел фиксации вьшолнен в виде подвижного стакана, установленного на шарикоподшипнике, контактирующего своим торцом с корпусом редуктора и связанного с винтом посредством механизма свободного хода, расположенного внутри стакана.
(Риг.2
Источники информации, принятые во внимание при экспертизе:
