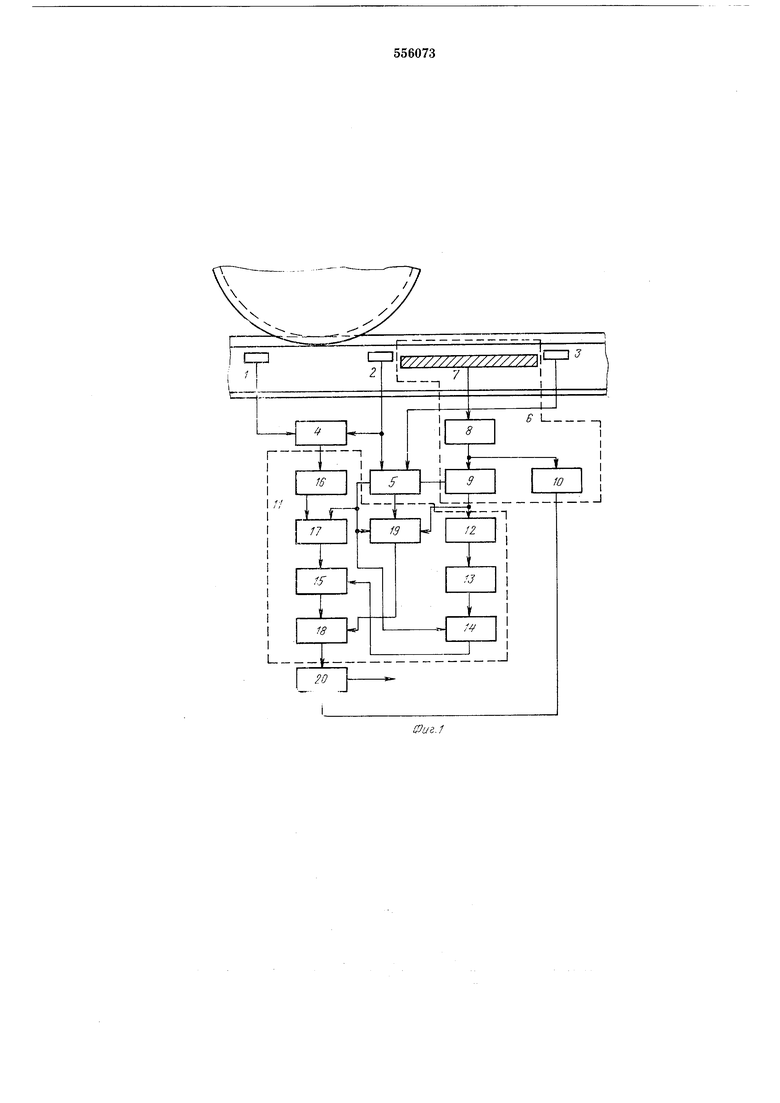
ного контура 7, в состав которого входит измерительный преобразователь, жестко соединенный с рельсом, связанным с автогенератором 8, который подключен к блоку 9 выделения и центрирования низкочастотной составляющей огибающей амплитудно-изолированного (АИ) напряжения и к блоку 10 измерения среднего значения амплитудно-модзлированного (AM) напряжения несущей частоты, характеризующего общий прокат (износ).
Узел 11 вычисления уклона неровностей содержит блок 12 определения экстремальных значений переменной составляющей напряжения огибающей, выполняющей также функции бинарного квантования производной от напряжения переменной составляющей, который подключен к блоку 10, последовательно соединенные генератор 13 линейно-изменяющегося напряжения, блок 14 памяти для запоминания амплитуд напря/кения и блок 15 деления напряжений. Узел 11 содержит также подключенную к блоку 4 последовательную цепь из генератора 16 линейно-изменяющегося напряжения, блока 17 памяти, блока 15, блока 18 умножения напряжений, который связан с блоком 19 памяти, подключенным к блоку 5 управления. Узел 11 выходом связан с блоком 20 принятия рещения, второй, вход которого подключен к блоку 10 измерепия среднего значения AM напряжения несущей частоты.
Блоки 14 и 17 памяти служат для запоминания амплитуд напряжений на выходах генераторов 16 и 13. Эти напряжения нропорциональны длине полуволны неровностей и скорости перемещения колес. Блок 19 памяти служит для запоминания напряжения, пропорционального размаху низкочастотного напряжения огибающей, зависящего от глубины неровности.
На выходе блока 15 образуется сигнал, пронорциопальный длине, а на выходе блока 18 сигнал, пропорциональный уклону измеряемой неровности . Блок 20 вырабатывает диагностический сигнал о соответствии величин общего и неравномерного износа колес допускаемым значениям. Сигнал принятия рещения вырабатывается после выхода контроируемого колеса из зоны действия измериельного преобразователя, ограниченного путевыми датчиками 2 и 3.
В устройстве используется токовихревой етод, основанный на применении высокочатотных измерительных преобразователей. Устройство работает следующим образом. При отсутствии в зоне действия измериельного преобразователя гребня колеса наряжение на выходе контура 7 имеет вид:
U(t) LJnSin2 f f,
где f/Ов - амплитуда напрял ения высокой
частоты;
/в - иесущая частота; t - текущее время.
Рассмотрим случай, когда на поверхности катания колеса имеется неровность синусоидального вида
, , . 2тел:
(2) h ,
где h, X - текущие значения ординаты и абсциссы неровности; / - длина полуволны неровности; АО - максимальная амплитуда неровности.
При перекатывании колеса с синусоидальной неровностью в зоне чувствительности вихретокового измерительного преобразователя расстояние между гребнем колеса и поверхностью высокочастотного контура 7, жестко соединенного с рельсом, изменяется но синусоидальному закону:
jj. CJ, . . . ,-sm t +
(3)
HO - максимальное расстояние между измерительным преобразователем и гребнем колеса;
V- скорость движения поезда; Ф - начальная фаза синусоидальной неровности, с которой колесо зашло в зону чувствительности преобразователя.
При уменьщении расстояния Я увеличиваются потери в контуре 7, связанные, главным образом, с уменьшением его добротности, что приводит к соответствующему изменению амплитуды генерируемого напряжения автогенератора 8, т. е. происходит амплитудная модуляция несущей частоты вида (3) низкочастотным напряжением:
U(f)Hosm2r.,
(4)
где и Q - амплитуда модулирующего напряжения, определяемого выражением
fii - условная частота модулирующего
колебания;
5 --чувствительность преобразователя к вертикальным перемещениям 50гребня;
Яо - вертикальное перемещение гребня
колеса; Гц -- условный период модулирующего
колебания.
55 Амплитудно - модулированное напряжение на выходе автогенератора 8 имеет вид:
в„ (1) f/B + Uo Sin (2r.f + cp) , (5)
где UB -среднее значение огибающей АМ-напряжения за период, характеризующий общий прокат, а колебание f/o sin(2j fiii+9) характеризует неравномерный волнообразный износ h поверхности катания колес. Среднее значение проката колеса за условный период Го, можно определить по формуле:h(()dt, где Г OK- - период усреднения; LO -часть длины окружности колеса, на которой производились измерения. Напряжение на выходе автогенератора 8 изменяется по закону амплитудно-модулированного колебания, причем модулирующее напряжение изменяется во времени в соответствии с изменением расстояния Я между гребнем катящегося колеса с неравномерным износом и поверхностью измерительного преобразователя, жестко связанного с базой отсчета на рельсе. Поэтому средний износ колеса можно определить по среднему значению напряжения на выходе генератора ггмакс , Л7МИН t/cp(ftcp)-- f U,(t)di + АМ к.п о где 7к.п - фактически реализуемый период усреднения; к-п - длина контура преобразователя. .Для измерения общего проката колес достаточно к выходу автогенератора 8 подключить вольтметр среднего значения. В формуле (7) t/ и и Jf - соответственно максимальные и минимальные значения АМ-напряжения несущей частоты на выходе автогенератора 8. Из выражения (5) видно, что для определения неравномерного проката необходимо выделить низкочастотное колебание X Xsin(2nfii +9), изменяющееся в соответствии с изменением расстояния Я между гребнем колеса и измерительным преобразователем. Для этого на выходе автогенератора 8 включен блок 9 выделения и центрирования низкочастотной составляющей огибающей АМ-напряжения. Размах амплитуд низкочастотной составляющей характеризует глубину неравномерного износа. В рассматриваемом случае размах, определяемый за время Гн, равен (случай синусоидального износа поверхности катания колеса). В общем случае при произвольной форме неравномерного проката размах амплитуд определяется как: Uf,. U, + Lr,(8) где f/i и t/2 - соответственно амплитуды положительной и отрицательной полуволн центрированной низкочастотной составляющей на выходе блока 9. Чтобы определить фактический уклон i неровности, необходимо сначала найти границы ее отдельных ветвей, т. е. определить ее протяженность /. Протяженность неровности / можно определить путем фиксирования экстремальных значений низкочастотной составляющей /н(0 о„зш(), т. е. значений 6н(0. равных Ui и f/2. Эта операция может выполняться дифференцированием низкочастотной огибающей Us(t), так как при Uji(t) Ui или f/2 первая производная обращается в 0. и, (О - Уо,, 2тг/„ cos (2r. +. -f). (9) Дифференцированный сигнал СнСО в блоке 12, кроме того, подвергается бинарному квантованию, т. е. на выходе его формируются двухполярпые импульсы, длительность которых определяется. где / - длина неровности; V- скорость поезда; ti - время прохождения неровности в зоне контроля измерительного датчика. Включенный на выходе блока 12 генератор 13 линейно изменяющегося напряжения вырабатывает напряжение U, mti,(11) где т - коэффициент преобразования генератора 13; ti - теми нарастания напряжения. Подставляя выражение (10) в (И), получим соотнощение: и, т.(12) Из соотношения (12) видно, что напряжение на выходе генератора 13 находится в обратной зависимости от скорости V. При определении длины неровности необходимо исключить скорость из выражения (12). Эту операцию осуществляет блок 15 деления напряжения, на входы которого поступают напрял ения с блоков 17 и 14. Блок 17 памяти запоминает напряжение, вырабатываемое генератором 16 линейно-изменяющегося напряжения, значение которого определяется выражением LJ m-, где т - коэффициент преобразования генератора 16; /о - расстояние между датчиками 1 и 2; L/v - напряжение, пропорциональное длительности управляющего импульса напряжения на выходе блока 4 определения скорости. Промежуточная операция, выполняемая блоком 15, записывается в виде соотношения L,l.
где D - сигнальный импульс на выходе блока 15, пропорциональный длине неровности;
LO - - постоянный коэффициент.
Как видно из соотношения (14), отношение
Utг 1
- Loi не зависит от скорости поезда, и, Uv
кроме того, функция отношения напряжений, вырабатываемых блоками 16 и 13, прямо пропорциональна длине неровности.
Поскольку уклон i оцределяется как:
/
(15)
а напряжение Uh, зафиксированное в блоке 19 памяти, пропорционально величине , Так как Uh KSHo,(16)
т,Ui
то, разделив с/д на - (или умножив на Uv
Uv ч
), получаем выражение
Ui
j UH-UV
(17) Ui
или, подставляя из выражения (14) значение
Ui отношения тт , получим
Uv
- /
1 1.
(18)
Из выражения (18) видим, что / прямо пропорционально величине уклона i, определяемого выражением (15), и не зависит от скорости движения поезда на участке контроля.
Таким образом, производя операцию UhUv in
- в блоке 18 умножения напряжении, поUi
лучаем на выходе последнего напряжение, пропорциональное истинному значению уклона неровности на поверхности катания колеса. Последовательности выполнения операций иллюстрируется на фиг. 2.
Токовихревой метод, основанный на применении высокочастотных автогенераторных измерительных преобразователей, обеспечивает принципиальную возможность осуществления непрерывного или кусочно-непрерывного бесконтактного контроля износа по всей длине окружности катящегося колеса с высокой точностью. В этом его основное преимущество перед другими точечными (дискретными) методами контроля.
Формула изобретения
Устройство для бесконтактного измерения износа колес при движении рельсового подвижного состава, содержащее путевые датчики регистрации прохода колес, блок определения скорости перемещения колес и блок управления, связанные с путевыми датчиками, узел бесконтактного измерения проката, подключенный к блоку принятия решения, отличающееся тем, что, с целью повышения
достоверности разбраковки, устройство содержит узел вычисления уклона неровностей, подключенный своими входами к блоку определения скорости перемещения колес, блоку управления и к одному из выходов узла бесконтактного измерения проката, а выходом - ко второму входу блока принятия решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БЕСКОНТАКТНОГО КОНТРОЛЯ ДЕФЕКТОВ ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСНЫХ ПАР ПРИ ДВИЖЕНИИ РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2292283C2 |
| Измерительный преобразователь перемещений | 1989 |
|
SU1684143A1 |
| Автогенераторный измеритель дисперсии диэлектрических свойств полимерных материалов | 1983 |
|
SU1100580A1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2085425C1 |
| Устройство для автоматического выявления неровностей на поверхности катания колесных пар | 1977 |
|
SU709440A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2167778C2 |
| УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2066646C1 |
| Способ контроля разности частот двух синусоидальных сигналов | 1991 |
|
SU1774280A1 |
| Калибратор коэффициентов амплитудной модуляции | 1986 |
|
SU1383227A1 |
| Широкополосный измеритель параметров диэлектриков | 1983 |
|
SU1109670A1 |