1
Изобретение относится к вычислительной технике и может использоваться в геодезии, навигации, при решении тактических задач.
Известны навигационные вычислительные устройства 1, содержащие блоки ввода, вывода, арифметические и логические блоки.
Существующие устройства для вычисления длины геодезической лииии и азимута между двумя точками, заданными геодезическими координатами ф1/ч и ф2А.2, осуществляют вычисление иутем решения только обратной геодезической задачи. При такой работе в случае отказа одного или нескольких элементов устройства рещение задачи оказывается ошибочным.
Наиболее близким к предлагаемому по технической сущности является устройство (2, содержащее блок сравнения, арифметические блоки, блок вывода информации.
Недостатки этого устройства:
- отсутствие дополнительного контроля выработанных данных, что вызывает необходимость применения трех идентичных устройств, так как в случае применения двух идентичных устройств и наличии расхождений в их показаниях оказывается невозможным определить, какое из устройств дает правильиые результаты;
-методическая погрешность обратной геодезической задачи полностью входит в ногрешиость выдаваемых результатов;
-ограниченность вырабатываемой длнны геодезической линии (при разности долгот
и широт по 180°).
Цель изобретения - повышение надежности и точности вычислений. Это достигается тем, что предлагаемое устройство содержит заиоминающий блок, коммутатор, блок коррекции, первый и второй блоки ввода геодезических координат, причем выход иервого блока ввода геодезических координат соединен с первым входом первого
арифметического блока, первый выход которого соединен с входом блока сравнения, вторые вход и выход первого арифметического блока соединены соответственно с выходом и входом запоминающего блока, а третьи вход
и выход - соответствеино с выходом второго арифметического блока и входом блока коррекций, первый, второй и третий выходы которого соединены соответственно с иервым входом коммутатора, первым входом второго
арифметического блока и выходом устройства, иервый и второй выходы блока сравнения соединены соответственно с вторым входом коммутатора и входом второго блока ввода геодезических координат, выход которого соединен с вторым входом второго арифметического блока, первый и второй выходы коммутатора соединены соответственно с третьим входом второго арифметического блока и входом блока вывода информации, вход которого соединен с входом устройства.
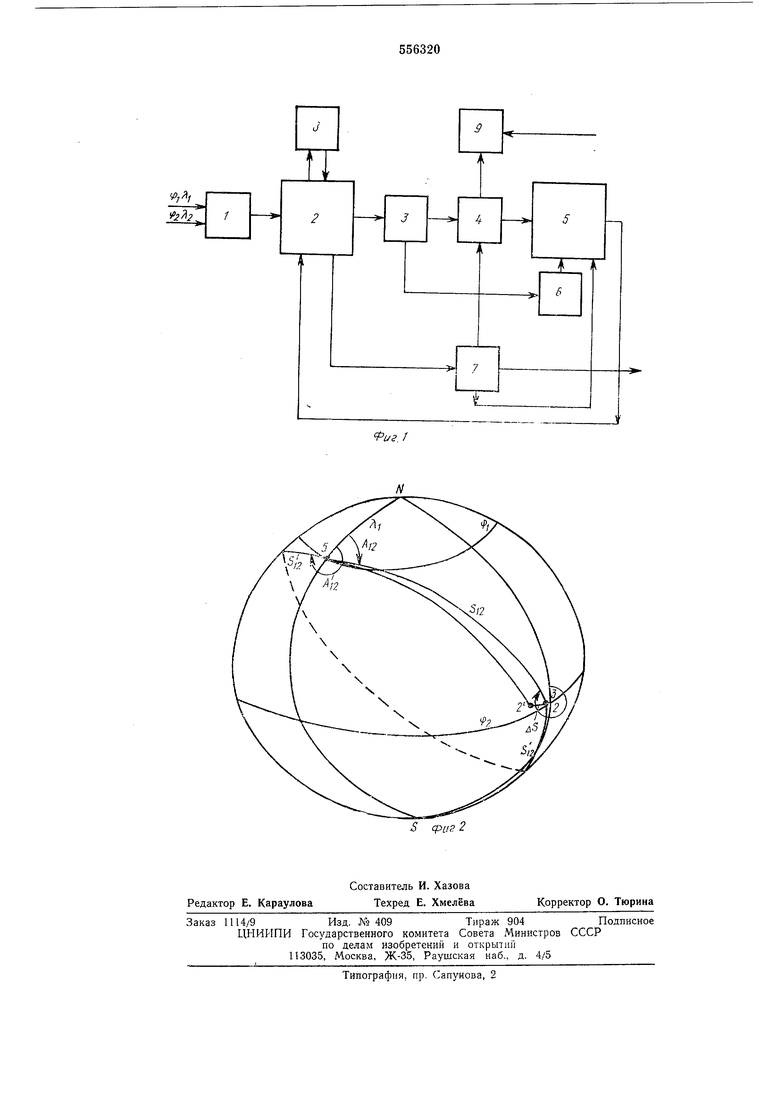
На фиг. 1 приведена блок-схема предлагаемого устройства; на фиг. 2 - схема расположения геодезической линии на сфероиде.
Устройство содержит первый блок 1 ввода геодезических координат, первый арифметический блок 2, блок сравнения 3, коммутатор 4, второй арифметический блок 5, второй блок 6 ввода геодезических координат, блок коррекции 7, запомипаюп;ий блок 8, блок вывода информации 9.
Выход первого блока 1 ввода геодезических координат ( () соединен с входом первого арифметического блока 2 вычисления малой геодезической линии и азимута, первый выход блока 2 соединен с входом запоминающего блока 8, выход которого соединен с входом блока 2, второй выход которого соединен с входом блока сравнения 3, третий выход блока 2 соединен с входом блока коррекции 7, первый выход блока сравнения 3 соединен с входом коммутатора 4, второй выход блока сравнения 3 соединен с входом второго блока 6 ввода геодезических координат, выход которого соединен с входом второго арифметического блока 5, первый выход коммутатора 4 соединен с блоком вывода 9, второй вход которого соединен с коммутатором дублирующего устройства для выработки длины геодезической линии н азимута, второй выход коммутатора 4 соединен с входом второго арифметического блока 5, выход которого соединен с входом первого арифметического блока 2, первый выход блока коррекции 7 соединен с входом коммутатора 4, второй выход блока коррекции 7 соединен с дублирующим устройством для вычисления длины геодезической линии и азимута, третий выход блока коррекции 7 соединен с входом второго арифметического блока.
На фиг. 2 приняты следующие обозначения: ф1А,1, - заданные геодезические координаты;
5i2 - выработанные значения малой длины геодезической линии; Ai2 - прямой азимут; Л21 - обратный азимут.
Первый блок 1 ввода геодезических координат представляет собой обычное устройство ввода с перфокарт, перфоленты или магнитных карт. Кроме того, устройство обеспечивает возможность ввода геодезических координат ф, вручную с помощью клавиш или тумблеров.
Первый арифметический блок 2 вычисления малой геодезической линии представляет собой арифметическое устройство, выполняющее операции сложения, вычитания, умножения, деления, возведения в степень, извлечения квадратного корня, Кроме того, в этом блоке хранятся команды, обеспечивающие вычисление тригонометрических функций, а также выбор коэффициентов, обеспечивающих выработку длины геодезической линии и азимута путем решения обратной геодезической задачи в соответствии с алгоритмом, закладываемым в устройство. Блок сравнения 3 представляет собой схему логического сравнения длины геодезической линии, вырабатываемой блоком 2, с длиной геодезической линии, являющейся предельно допускаемой для данной задачи. В зависимости от результата сравнения схемы выработки управляюнгего сигнала вырабатывает сигнал, обеспечивающий подключение HJHII с выработаиными значениями длины геодезической лппии и азимута к коммутатору илп передачу управляющего сигнала в блок 6 для
ввода геодезической линии и азимута в блок 5. Блок 4 представляет собой обычный коммутатор, обеснечнвающий подключение информационных щии, несущих информацию о выработанных значениях длины геодезической
линии и азимута, либо к второму арифметичеСЕадму блоку 5, либо к блоку вывода 9. Сигнал на переключение выдается блоком коррекции 7. Второй арифметический блок 5 представляет собой арифметическое устройство, обеспечивающее решение нрямой геодезической задачи. В блоке хранится набор стандартных субблоков, обеспечивающих вычисление тригонометрических функций и 12 постоянных
коэффициентов.
Второй блок 6 ввода геодезических координат представляет собой устройство ввода с перфокарт, перфоленты либо с магнитных карт. Имеется возможность ввода данных вручную
с помощью клавиши или тумблеров. По своей структуре этот блок аналогичен блоку 2 и может отличаться только количеством вводимых разрядов.
Блок коррекции 7 представляет логическую схему сравнения величины отклонения Д5о, ASi, ..., ASft, вырабатываемой блоком 2, с дозначениями и S,. пускаемыми хранящимися в блоке 7.
Схема выработки управляющего сигнала блока 7 обеспечивает, в зависимости от результата операции сравнения, либо подключение информационных шин со значениями Sj2 и Ai2 к коммутатору 4, либо выдачу управляющего сигнала в дублирующее устройство для выработки длины геодезической линии и азимута.
При последующих операциях сравниваются значения ASo и AS, ASi и AS2 и т. п. Значение
ASft сравнивается с , и в зависимости
от результата сравнения или в блок 2 выдаются значения информационных сигналов, представлеиных в виде сигналов двоичного кода н нредставляющие приращения длины геодезической линии (±ASi2 1000, ±100,
±10 м) и азимута ( ±l°, ±1, ±1 и т. п.) или в блок 4 выдается сигнал на переключение информационных шин, несущих информацию о длине геодезической линии и азимута, к блоку 9.
Запоминающий блок 8 представляет собой простейшую арифметическую схему в виде регистра, выполняющую одну операцию вычитания (40000000-5i2) и одну операцию сложения (180°+Л12). Этот блок работает лишь в том случае, когда в вводимые координаты и Ф2А.2 добавляется дополнительный признак, свидетельствующий о том, что вычисление геодезической линии и азимута следует производить по больщой длине.
Блок вывода 9 представляет собой устройство, в котором сигналы с информационных шин, например азимута, либо непосредственно поступают на преобразователь код-угол, либо в навигационное устройство для введения дополнительных поправок (на ветер, вращение Земли и т. п.).
Информационные сигналы, соответствующие выработанным значениям геодезической дальности, поступают в навигационное устройство для решения поставленной задачи (например, для запоминания с целью сравнения текущей геодезической дальности с выработанным значением 5i2 или для определения другого параметра, зависящего от длины геодезической линии).
Устройство работает следующим образом.
Известные геодезические координаты исходной точки / () и заданной точки 2 () из блока ввода 1 поступают в первый арифметический блок 2 вычисления малой геодезической линии.
В соответствии с алгоритмом, заложенным в блок, производится вычисление длины геодезической линии 5i2 и азимута путем решения обратной геодезической задачи (ОГЗ), например, по формулам В. П. Морозова.
С выхода блока 2 значения 5i2, Ai и поступают в блок сравнения 3, где осуществляется операция логического сравнения 5i2 с 5 2доп- Пусть , тогда 5, и (fiKi из блока 3 через коммутатор 4 поступают во второй арифметический блок 5. В блоке 5 в соответствии с заложенным алгоритмом (например, по формулам Бесселя) по заданным значениям . и вырабатываются фиктивные значения геодезических координат «2 2 точки 2. Иосле окончания работы блока 5 выработанные значения ccg 2 из блока 5 поступают в блок 2 на место координат исходной точки / фхЯ. В блоке 2 вырабатывается значение длины геодезической линии Д5о между точками 2 и 2 путем решения ОГЗ. После окончания повторной работы блока 2 выработанное значение Д5о поступает в блок коррекции 7. Если бы методические погрешности формул и вычислений были равны нулю, то при исправно работающем устройстве точка 2 должна совпасть с точкой 2, и тогда
Д5о 0. Практически процессор вносит погрешности вычислений, величина которых примерно может быть определена заранее. Методические погрешности формул также не равны нулю, но их порядок всегда известен заранее. Поэтому величина ASo всегда может быть определена заранее, и при исправно работающем устройстве всегда могут быть найдены условия . В этом случае, если в устройстве имеются какие-то неисправности, искажающие результаты, то вероятность того, что в этом случае точка 2 совпадает с
точкой 2 с точностью до Д5,
близка к
Одоп
нулю, так как для получения такого результата необходимо, чтобы искажения при вычислении в блоке 2 и искажения при вычислении Р2 2 блоке 6 были одинаковыми по величине, но противоположными по знаку. В том
случае, когда , блок 7 выдает сигнал о неисправности устройства и передает команду на передачу выработки длины геодезической линии и азимута в дублирующее устройство. Если (,„, то величина
коррекции азимута ДЛ12 (например, равная + 1°) из блока 7 передается в блок 5 и складывается со значением , используемым в иредыдущем вычислении. В результате получают новое значение Л|2 /112+ДЛ12. Блок 5 с
вновь полученным значением Л12 и предыдущими координатами исходной точки ( и 5|9 вырабатывает новые координаты точки 2 fcpj Xj). Выработанные координаты Р2 2 поступают вновь в блок 2, где определяется величииа отклонения A5i. Из блока 2 величина A5i нодается в блок 7 и сравнивается с Д5о. Если , то в блок 5 вновь посылается величина ДЛ12, равная предыдущей. Цикл работы устройства повторяется до тех пор, пока не будет выполнено условие . После этого в блок 5 посылается значение -ДЛ12 до тех пор, пока не будет выполнено условие . Процесс изменения приращений ±ДЛ{ и ±Д5,- продолжается до тех пор, пока Д5;е не достигнет минимально возможного значения. Если при этом , то блок коррекции 7 вырабатывает сигнал на переключение с помощью
коммутатора 4 информационных шин с входа блока 5 на вход блока вывода 9. При этом выработанные значения длины геодезической линии и азимута обеспечивают минималыю достижимое отклоиение от заданной точки 2,
ограничиваемое только методической погрешностью ПГЗ и конечным количеством двоичных разрядов арифметических устройств. Если ,,, что свидетельствует о наличии большой методической погрешности ПГЗ в
выдаваемых данных, то блок 7 вырабатывает сигнал о наличии большой методической погрешности ПГЗ и управление для продолжения вычислений передается дублирующему устройству выработки длины геодезической
линии и азимута. Рассмотрим вариант работы устройства, когда первоначально выработанное значение длины геодезической линии 5i2 оказывается больше допускаемого значения 5,2др„. Такой вариант возможен, например, в том случае, когда расстояние между двумя аэропортами больше радиуса действия самолета. Прн этом блок сравнения 3 выдает уиравляюший сигнал для возможности ввода во второй арифметический блок 5 с номошыо блока ввода 6 значения геодезических координат до промежуточной точки /, от которой ,2.. Рассмотрим работу устройства в том случае, когда возникает необходимость в определении большой длииы геодезической линии, иревышаюш,ей половину оборота вокруг Земли. Значения геодезических координат ф1Л1 и , снабженные маркером, из блока 1 ввода геодезических координат поступают в блок 2, где как и обычно вырабатываются значения малой длины геодезической линии 5|2 и азимута Л12. Наличие маркера позволяет после окончаиия выработки малой длины геодезически линии и азимута передать полученную информацию из блока 2 в блок 8, где к выработанному в блоке 2 значению азимута прибавляется угол, равиый 180°, и от обш,ей длины геодезической лин1И1, проходящей по наибольшему кругу и равной примерно 40000 км, вычитается выработанное в блоке 2 значение малой геодезической линии Si. После проведения этих операций приближеииые значения большой длины геодез ческой лииии и азимута вновь возв1)ащаются в блок 2, где методом последовательных приближений, рассмотренным выше, производится уточнение приближенных значений. Из рассмотренной выше работы устройства видно, что ввод новых блоков (коррекции, выработки большой длины геодезической линии, коммутатора) позволяет повысить точность выработки данных за счет коррекции первоначально выработанных значений длины геодезической линии и азимута, что позволяет выбрать погрешность ОГЗ, снять ограничения с длины геодезической линии при обеспечении высокой точности (также за счет корректировки первоначальных данных, выработанных блоком 8). 5 10 15 20 25 30 35 40 45 50 Кроме того, введение новых блоков н использование блока 5 (ранее используемого Д.ЛЯ других целей), повторное использование блока 2 для контроля правильности выработанных значений позволяет резко повысить надежность контроля исправности работы устройства. При появленни неисправности в предлагаемом устройстве дублируюшее устройство может самостоятельно произвести выработу 5i2 и А 2Формула изобретения Устройство для вычисления длины геодезической лииии и азимута, содержащее блок сравнения, арифметические блоки, блок вывода информации, отличающееся тем, что, с целью повышения надежности и точности вычислений, оно содержит запоминающий блок, коммутатор, блок коррекции, первый и второй блоки ввода геодезических координат, причем выход первого блока ввода геодезических коордииат соединен с первым входол-г первого арифметического блока, первый выход которого соединен с входом блока сравнения, вторые вход и выход первого арифметического блока соединены соответственно с выходом и входом запомииающего блока, а третьи вход и выход - соответственно с выходом второго арифметического блока и входом блока коррекции, первый, второй и третий выходы которого соединены соответственно с первым входом коммутатора, первым входом второго арифметического блока и выходом устройства, первый и второй выходы блока сравнения соединены соответственно с вторым входом коммутатора и входом второго блока ввода геодезических координат, выход которого соединен с вторым входом второго арифметического блока, первый и второй выходы коммутатора соединены соответственно с третьим входом второго арифметического блока и входом блока вывода информации, вход которого соединен с входом устройства. Источники информации, принятые во внимание при экспертизе: 1.Патент США № 3534399. кл. 235-150.27, 1970. 2.Патент США № 3515342, кл. 235-150.27, 1970.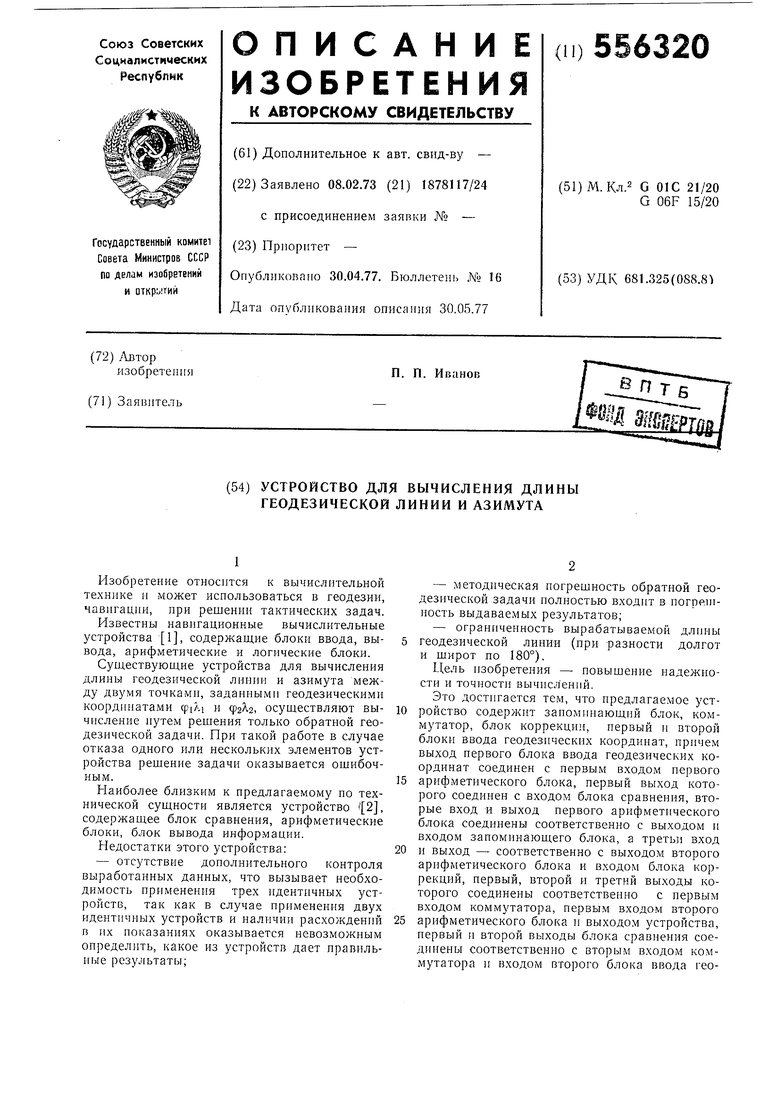
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ПО ДВУМ СОСТАВЛЯЮЩИМ СКОРОСТИ | 2000 |
|
RU2184348C2 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ НА ГОРИЗОНТЕ ПЛАВАНИЯ | 2007 |
|
RU2342746C1 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ПРИ НАХОЖДЕНИИ ПОДВОДНОГО ОБЪЕКТА НА ГОРИЗОНТЕ ПЛАВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГИДРОАКУСТИЧЕСКОГО КАНАЛА ПЕРЕДАЧИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2008 |
|
RU2398316C2 |
| Устройство для регистрации информации | 1978 |
|
SU769576A1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОКАЗАНИЙ | 2000 |
|
RU2184349C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
| Цифровой преобразователь координат | 1981 |
|
SU1076903A1 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ОБРАБОТКИ ДАННЫХ НА ОСНОВЕ КРИПТОКОДОВЫХ КОНСТРУКЦИЙ В КОМПЛЕКСНОЙ ПЛОСКОСТИ | 2022 |
|
RU2787941C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ МОДИФИЦИРОВАННЫХ КРИПТОКОДОВЫХ КОНСТРУКЦИЙ ДЛЯ ПОМЕХОУСТОЙЧИВОЙ ПЕРЕДАЧИ ДАННЫХ ПО КАНАЛАМ СВЯЗИ | 2023 |
|
RU2812949C1 |