Изобретение относится к навигации наземных транспортных средств (НТС).
Известно множество технических реализаций аппаратуры счисления координат (АСК) для плавающих, летательных и НТС, блочная схема которых одинакова и представлена на фиг. 1 [1, 2, 3].
АСК состоит из установленных на НТС блока навигационных датчиков (БНД1) (датчика величины скорости движения и датчика направления движения) в геодезической системе координат (ГСК), формирователя тригонометрических функций (ФТФ2), двух одинаковых навигационных вычислителей (НВ3 и НВ4) и блока ввода начальных координат (БВНК5), причем выход БНД1 по углу направления движения соединен с входом ФТФ2, выходы которого соединены с первыми входами соответствующих НВ3 и НВ4, выход БНД1 по величине скорости соединен со вторыми входами НВ3 и НВ4, дополнительные входы которых соединены с соответствующими выходами БВНК5, выходы которых являются выходами АСК.
Работает данная АСК следующим образом.
При трогании с места с выходов БНД1 сигнал о величине угла положения продольной оси НТС в геодезической системе координат (α) поступает на вход ФТФ2, который вырабатывает соответствующие значения cosα и sinα и подает их на первые входы соответствующих НВ3 и НВ4, а сигнал о величине скорости движения поступает на вторые входы НВ3 и НВ4, НВ3 и НВ4 из сигналов БНД1 формирует величины приращений координат ΔX и ΔY за время движения по правилам:
здесь α - текущее значение угла вектора скорости в геодезической системе координат;
V - модуль скорости движения;
ΔSi - приращение пути V•Т, где Т - такт цикла опроса,
складывает их с получаемыми по дополнительным входам от БВНК5 значениями координат начальной точки XH и YH и формирует выходные сигналы: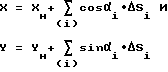
Определенные таким образом координаты приписываются навигационной точке машины (НТМ), за которую обычно выбирают место водителя, т.к. именно он останавливает машину у ориентиров. Однако АСК определяет координаты по направлению оси машины и по величине скорости, определяемой в точке размещения датчика скорости.
При движении по дуге каждая точка НТС имеет и разные скорости, и разное направление их в ГСК (траектории движения колес на повороте подтверждают это). Понятно, что приращение координат для разных точек НТС при движении по дуге будет различным. Имеет смысл определить, координаты какой точки машины определяет АСК и как по ним найти координаты места водителя (НТМ)
Существующие виды БНД позволяют определять или продольную составляющую скорости точки установки датчика скорости (ДС), которая одинакова для всех точек НТС, или скорость точки установки ДС в виде модуля суммы продольной и поперечной скоростей 
Сказанное можно сформулировать следующим образом: существующие виды АСК (при идеальных датчиках) без погрешностей определяют координаты или центра вращения машины (ЦВМ), или точки расположения ДС, измеряющего VПР и VПОП, а не места водителя.
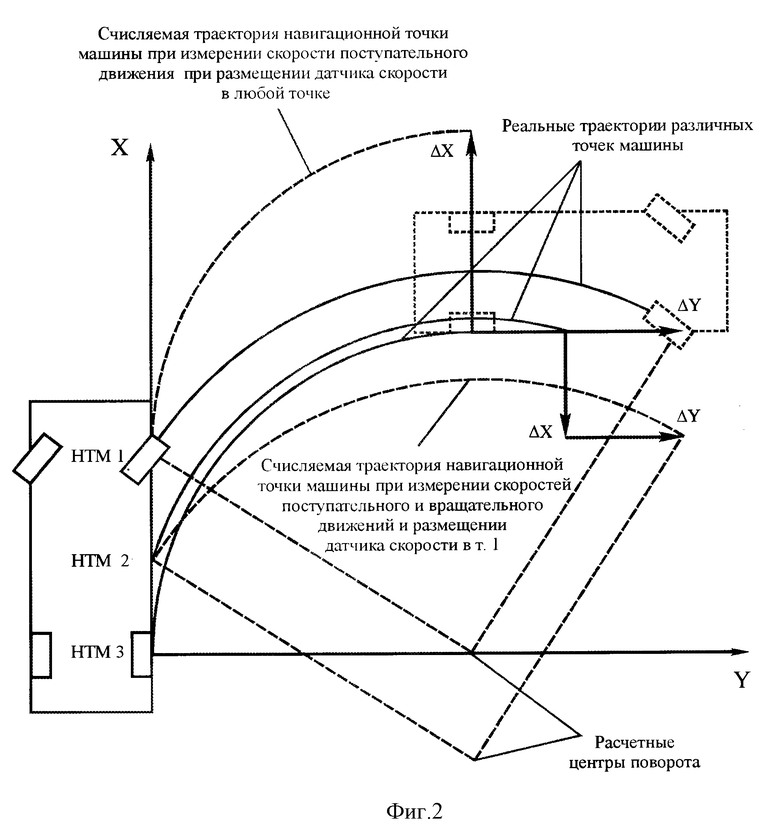
Для иллюстрации образования погрешности от вращения НТС введем вспомогательную систему координат, ось X которой совпадает с направлением поступательного движения, а ось Y идет вправо. Поместим начало этой системы в точку начала поворота, совместив ее с ЦВМ (см. фиг. 2).
Для расчета величины и знака погрешности воспользуемся обычной для НТС ГСК, представив их в виде:  = X+jY. Координаты, приписываемые НТМ, являются координатами, определенными аппаратурой согласно ее конструкции и размещению на НТС, а истинные координаты НТМ равны первым в случае размещения ДС в НТМ. Поэтому погрешность определения координат НТМ равна:
= X+jY. Координаты, приписываемые НТМ, являются координатами, определенными аппаратурой согласно ее конструкции и размещению на НТС, а истинные координаты НТМ равны первым в случае размещения ДС в НТМ. Поэтому погрешность определения координат НТМ равна: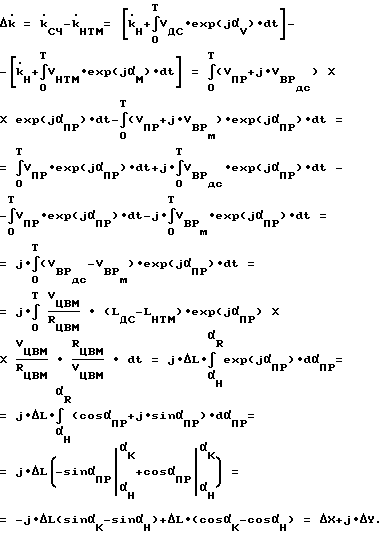
Здесь V - модуль скорости движения точки размещения датчика скорости;
αV - направление (угол) вектора скорости в геодезической системе координат;
VНТМ - модуль скорости движения навигационной точки машины;
αM - направление (угол) 
Vпр - проекция вектора скорости на продольную ось машины, задаваемую ДС;
Vврдс - вращательная скорость точки установки ДС;
αПР - направление (угол) 
Vврм - вращательная скорость точки машины НТМ;
Vцвм = Vпр - поступательная скорость машины, равная скорости движения центра вращения машины;
RЦВМ - радиус дуги движения ЦВМ;
LЕНТ=LДС - отстояние ДС от ЦВМ;
LНТМ - отстояние HTM от ЦВМ (места водителя от ЦВМ);
αК,Н - конечный и начальный углы направления движения на трассе.
Величины погрешностей равны:
1. αН= 0, αК= ±π/2 и ΔX = ΔL, ΔY = -ΔL(±1) = ±ΔL.
2. αН= 0, αК= ±π и ΔX = -2ΔL, ΔY = 0.
Отсюда видно, что для получения XНТМ и YНТМ необходимо к показаниям АСК прибавить поправки
ΔXП= -ΔX и ΔYП= -ΔY:
siqnΔα = siqn(αК-αН),
ΔL = LEHT-LHTM,
Δcosα = cosαК-cosαН,
Δsinα = sinαК-sinαН.
Здесь: LЕНТ - расстояние от ЦВМ до ЕНТ (ЕНТ для одноканального ДС, измеряющего только продольную составляющую скорости, является ЦВМ, для ДС с измерением Vпр и Vпопер ЕНТ является точка его размещения).
Отсюда видно, что при использовании места водителя в качестве HTM (в этом случае удобно останавливать машины около или над различными точками, координаты которых подлежат определению) возникает погрешность в определении координат, целиком определяемая разностью расстояний между размещением датчика скорости (ЕНТМ) и местом водителя (HTM) относительно центра вращения машины (задняя ось для двухосной машины, средняя ось для 3-осной машины с поворотом передних и задних колес и т.д.) и поворотом НТС на трассе.
При разворотах на 180oC погрешности достигают величины 2ΔL, что на современных машинах составит 5-20 м (в зависимости от LЕНТ и LНТМ)
Эта особенность использования существующих типов АСК НТС является их недостатком.
Предлагаемое изобретение направлено на увеличение точности определения координат НТМ при сохранении удобства эксплуатации АСК в составе НТС при любой геометрии маршрутов.
Сущность предлагаемого изобретения состоит в том, что в известную АСК, содержащую блок навигационных датчиков, формирователь тригонометрических функций, блок ввода начальных координат и два навигационных вычислителя, у которой выход блока навигационных датчиков по углу соединен с входом формирователя тригонометрических функций, а выход по скорости - со входами соответствующих навигационных вычислителей, вторые входы которых соединены с выходами формирователя тригонометрических функций по cosαV и sinαV соответственно, дополнительные входы соединены с выходом блока ввода начальных координат по XH и YH соответственно, а выходы навигационных вычислителей являются выходом аппаратуры по координатам X и Y соответственно, введены блок управления вычислением (БУВ), два одинаковых вычислителя (В), блок хранения параметра (БХП) и два арифметических устройства (АУ), при этом БУВ по входу соединен с выходом БНД по скорости и вырабатывает электрические импульсы при трогании НТС с места и при его остановке, оба эти выхода соединены с соответствующими управляющими входами введенных вычислителей, первые входы которых соединены с соответствующими выходами ФТФ, а вторые входы - с входом БХП, выходы вычислителей соединены с первыми входами соответствующих АУ, вторые входы которых соединены с выходами соответствующих НВ, а выходная информация о значении координат НТМ снимается с выходов АУ.
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена блочная схема АСК, принятой за прототип; на фиг. 2 представлена схема возникновения погрешности; на фиг. 3 - блочная схема предлагаемой АСК.
Предлагаемая АСК состоит из БНД1, ФТФ2, НВ3 и НВ4, БВНК5, причем выход БНД1 по дирекционному углу α соединен с входом ФТФ2, а выход по пути - с первыми входами соответствующих НВ3 и НВ4, вторые входы которых соединены с выходами ФТФ2 по cosα и sinα, третьи входы соединены с соответствующими выходами БВНК5, а для компенсации погрешности из-за вращения машины на поворотах в нее введены блок управления вычислением (БУВ6), блок хранения параметра (БХП7), вычислители поправок 8 и 9 и арифметические устройства (АУ10 и АУ11), при этом вход БУВ6 соединен с выходом БНД1 по пути, его выходы по сигналам о начале движения и остановке соединены с управляющими входами обоих введенных вычислителей поправок 8 и 9, первые входы которых соединены с выходом БХП7, вторые - с выходами ФТФ2 по cosα и sinα соответственно, а выходы - с первыми входами АУ10 и АУ11, вторые входы которых соединены с выходами соответствующих НВ3 и НВ4, а выходы являются выходами аппаратуры.
При трогании машины с места с выходов БНД1 сигналы о величине скорости и о ее направлении в геодезической системе координат поступают на входы НВ3 и НВ4 и ФТФ2 соответственно, одновременно сигнал о величине скорости поступает в БУВ6, который формирует сигнал о начале движения, поступающий в вычислители поправок 8 и 9. Из сигнала об угле α ФТФ2 вырабатывает значения cosα и sinα и посылает их во все вычислители. Вычислители поправок 8 и 9 запоминают начальные значения cosαН и sinαН, навигационные вычислители во время движения вычисляют приращения координат, суммируют их с начальными координатами и через АУ10 и АУ11 посылают потребителю.
В момент остановки машины БУВ6 формирует сигнал об остановке, по которому вычислители поправок 8 и 9 вычисляют поправки к координатам и передают их в арифметические устройства 10,11, которые суммируют их с определенными на момент остановки координатами для компенсации влияния вращения машины на поворотах, полученными от НВ3 и НВ4. Таким образом, на момент остановки машины потребитель получает значение откорректированных координат, т.е. координат с уменьшенной погрешностью.
Предлагаемая аппаратура представляет собой обычную АСК, в которую введено устройство выработки и введения поправки, учитывающей разные траектории НТМ и ДС (при несовпадении их мест расположения на НТС) на криволинейной трассе, причем поправка вводится в момент остановки НТС.
Поэтому БУВ6 вырабатывает сигналы-команды в моменты трогания с места и в момент остановки. В момент трогания выходной сигнал БУВ6 дает команду на запоминание значений cosα и sinα, называемых начальными, в В8,В9. В момент остановки БУВ6 вырабатывает команду на считывание В8, В9 значения ΔL из БХП7 и конечных значений cosα и sinα, после чего В8, В9 определяют поправку, а АУ производят суммирование поправок с начальными координатами. Возможна реализация заявляемого устройства с использованием стандартных компонентов ЭВМ и доработки алгоритма и программы работы АСК.
Предлагаемое техническое решение прошло экспериментальную проверку, подтвердившую наличие данной погрешности у прототипа и практически полную ее компенсацию в заявляемой АСК, и планируется к внедрению в разрабатываемую аппаратуру.
Предлагаемая АСК может использоваться на разных типах НТС, но при этом в БХП должна быть введена своя величина ΔL (разница расстояний от центра вращения машины места установки датчика скорости и места водителя).
Источники информации
1. Колчинский В. Е. , Мандуровский И.А., Константиновский М.И. Доплеровские устройства и системы навигации - М.: Советское радио, 1975.
2. Дудко Г. К. , Резников Г.Б. Доплеровские измерители скорости и угла самолетов - М.: Советское радио, 1964.
3. Самолетные навигационные системы /Сборник.- М.: Воениздат, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ПО ДВУМ СОСТАВЛЯЮЩИМ СКОРОСТИ | 2000 |
|
RU2184348C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОКАЗАНИЙ | 2000 |
|
RU2184349C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА СЕВЕР | 2002 |
|
RU2207507C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |
| КОМПЛЕКСИРОВАННЫЙ ДОПЛЕРОВСКИЙ МОДУЛЬ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2213981C2 |
| ДОПЛЕРОВСКИЙ ДАТЧИК ПРИРАЩЕНИЙ ПУТИ С УСТРОЙСТВОМ СТЕНДОВОЙ КАЛИБРОВКИ | 2003 |
|
RU2246737C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2013 |
|
RU2545490C1 |

Изобретение относится к навигации наземных транспортных средств. Аппаратура содержит блок навигационных датчиков, формирователь тригонометрических функций, два навигационных вычислителя, блок ввода начальных координат. За счет введения в аппаратуру блока хранения параметра, блока управления вычислением, двух одинаковых вычислителей и двух арифметических устройств обеспечивается повышение точности измерения координат путем учета приращения координат от вращательного движения транспортного средства вокруг своего центра вращения при движении по кривой. 3 ил.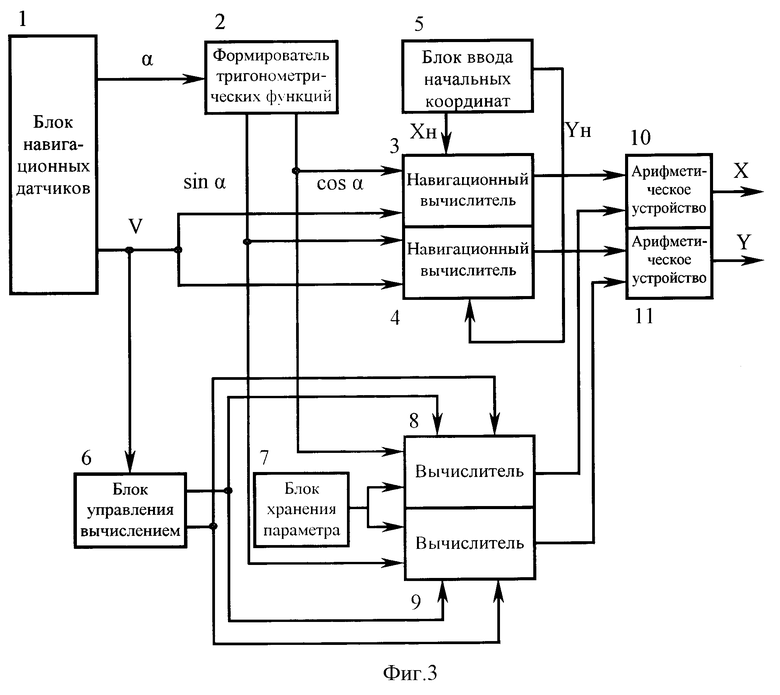
Аппаратура счисления координат с компенсацией погрешности от вращения агрегата, содержащая блок навигационных датчиков (датчик величины скорости и датчик угла направления движения в геодезической системе координат), формирователь тригонометрических функций, два навигационных вычислителя и блок ввода начальных координат, причем выход блока навигационных датчиков по скорости движения соединен с входами обоих навигационных вычислителей, вторые входы которых соединены с соответствующими выходами формирователя тригонометрических функций, вход которого соединен с выходом блока навигационных датчиков по углу, а дополнительные входы навигационных вычислителей соединены с выходами блока ввода начальных координат, отличающаяся тем, что в нее введены блок хранения параметра, блок управления вычислением, два одинаковых вычислителя и два арифметических устройства, при этом вход блока управления вычислением соединен с выходом блока навигационных датчиков по скорости, выходы блока управления вычислением соединены с соответствующими входами обоих вычислителей, первые входы вычислителей соединены с выходами формирователя тригонометрических функций по cosα и sinα соответственно, вторые входы - с выходом блока хранения параметра, выходы вычислителей соединены с первыми входами арифметических устройств, вторые входы которых соединены с выходами соответствующих навигационных вычислителей, причем выходы являются выходами аппаратуры счисления координат, а хранящийся параметр определяется как разность отстояний от центра вращения машины места установки датчика скорости и места водителя.
| DE 3033279 A1, 11.11.1982 | |||
| Навигационный счислитель координат | 1989 |
|
SU1820218A1 |
| Устройство для определения координат | 1989 |
|
SU1753275A1 |
| RU 96119778 A1, 20.12.1998. | |||

