Предлагаемое изобретение относится к области навигации и представляет собой измерительную систему, вычисляющую координаты навигационной точки транспортного средства по величине и направлению скорости его движения.
Известно множество технических реализаций аппаратуры счисления координат (АСК) для транспортных средств на море, в воздухе и на суше, блочная схема которых [1] представлена на фиг. 1.
Известная АСК, которая служит прототипом для заявляемой, состоит из датчика направления скорости движения, называемого обычно курсовой системой (КС1), датчика величины скорости движения, называемого путевой системой (ПС2), блока вычисления приращений координат (БВПК3), блока ввода начальных координат (БВНК4) и арифметического устройства (АУ5), причем выходы КС1 и ПС2 соединены с соответствующими входами БВПК3, выходы которого по координатам Х и Y соединены с соответствующими входами АУ5, вторые входы которого соединены с выходами БВНК4 по начальным значениям координат Х и Y соответственно, а выходы являются выходами АСК по координатам Х и Y.
АСК, построенная по такой схеме, с использованием различных реализаций гироскопических КС и различных ПС (датчиков, работающих от колеса, доплеровских датчиков и т.д.) широко используется в отечественной и зарубежной военной и гражданской технике.
АСК летательных аппаратов для удержания погрешности в приемлемых пределах используют одновременно доплеровские датчики скорости, датчики воздушной скорости, которые корректируют (автоматически) показания по данным позиционных систем навигации [2].
Однако увеличение погрешностей измерения координат с увеличением длин трасс и времени движения определенным образом ограничивает их использование на наземных транспортных средствах (НТС).
Алгоритм счисления координат имеет вид:
где  координаты точки в комплексном представлении;
координаты точки в комплексном представлении;
V - модуль скорости движения точки;
αV- направление скорости в геодезической системе координат;
ХH, YH - координаты начальной точки маршрута.
Сигналы о величине V и αV вырабатывают ПС и КС АСК, поэтому приборные значения этих величин отличаются от их истинных значений. Эти отличия составляют погрешности ПС и КС и приводят к появлению погрешностей счисления координат.
где 
R - модуль радиус-вектора точки;
αR- угол направления радиус-вектора точки;
ΔX, ΔY- приращения координат за счет перемещения НТС;
ΔX, ΔY- погрешности счисления приращения координат, причем:
Re - реальная часть комплексной погрешности;
Iм - мнимая часть комплексной погрешности;
δV- относительная погрешность ПС;
ΔαV- погрешность измерения αV КС;
αV- угол направления движения;
V - модуль скорости движения.
Из физических и технических принципов работы и построения ПС и КС понятно, что δ во время совершения марша можно считать постоянной случайной величиной, а ΔαV= ΔαCB+α′•t, ΔαCB/и α′ - случайные постоянные величины. С учетом этого для комплексной погрешности можно получить выражение:
Отсюда видно, что погрешности АСК-прототипа при движении с разными скоростями имеют разные величины, а при увеличении времени движения составляющая, обусловленная "уходом" гироскопа, становится преобладающей и приводит к появлению неприемлемо больших погрешностей.
При заданной точности определения координат АСК-прототип имеет ограничения сверху на длительность совершения марша и на длину маршрута, что является существенным ее недостатком.
Изобретение направлено на увеличение точности счисления координат за счет снятия ограничений на длительность и длину работы на известном маршруте за счет применения автоматической дискретной подстройки координат и регулировки КС на промежуточных точках маршрута, координаты которых выбираются из памяти хранителя эталонных координат, и за счет обнаружения схода с маршрута.
Сущность предлагаемого изобретения состоит в том, что в известную АСК, содержащую путевую систему (ПС), курсовую систему (КС), блок вычисления приращений координат (БВПК), блок ввода начальных координат (БВНК) и арифметическое устройство (АУ), причем выход ПС соединен с первым входом БВПК, выходы которого по Х и Y соединены с соответствующими входами АУ, вторые входы которого соединены с соответствующими выходами БВНК, для обеспечения измерения координат машины, работающей на известном маршруте, введены хранитель эталонных координат (ХЭК), преобразователь приращения прямоугольных координат в круговые (ППК), три сумматора (∑), три блока разности (Δ), блок сравнения (БС) и блок обнаружения схода с маршрута (БОСМ), при этом выход КС через ∑N1 соединен с соответствующим входом БВПК, выходы БВПК дополнительно соединены с соответствующими входами ХЭК, выходы АУ соединены с первыми входами ∑N2 и ∑N3 соответственно, выходы ∑N2 и ∑N3 являются выходами всей аппаратуры и соединены с соответствующими входами ППК и ΔN2, ППК и ΔN3 соответственно, вторые входы ΔN2 и ΔN3 соединены с выходами ХЭК по Х и Y соответственно, выходы ХЭК по ΔRЭ и αЭ соединены с БС и ΔN1 соответственно, вторые входы которых соединены с входами ППК по ΔRПР и αПР соответственно, выход ΔN1 соединен со вторым входом ∑N1, выход ΔN2 - со вторым входом ∑N2, выход ΔN3 - со вторым входом ∑N3, выход БС соединен с управляющими входами ХЭК, ∑N1, ∑N2, ∑N3 и БОСМ, вход БОСМ соединен с выходом ΔN1, а выход является выходом АСК по сигналу схода с маршрута.
Введенные узлы с соответствующими связями обеспечивают автоматическое сравнение текущих выходных координат (прямоугольных и круговых) с соответствующими эталонными координатами промежуточных точек, а в момент ΔRПР= ΔRЭ ввод поправок в координаты и КС, что удерживает погрешности АСК от КС на уровне эталонных, оставляет погрешности от ПС и позволяет вырабатывать сигнал "сход с маршрута".
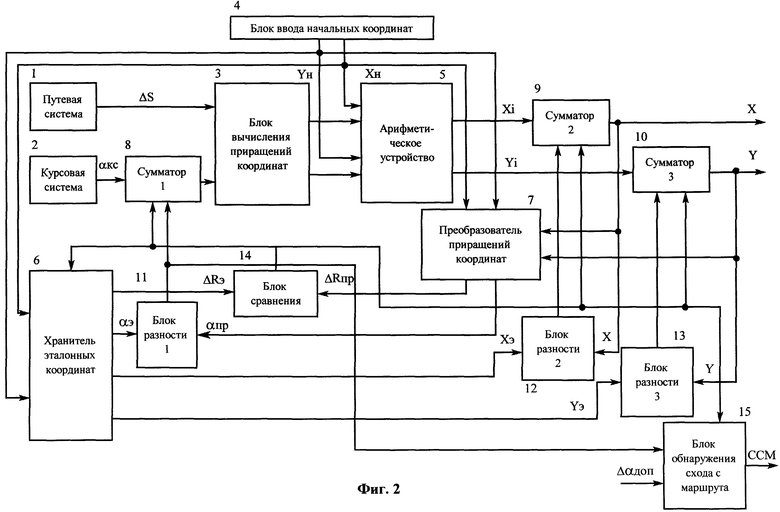
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена блок-схема АСК-прототипа, на фиг.2 - блочная схема заявляемой АСК, на фиг.3 - 5 - графики счислимого маршрута, поясняющие суть работы автоматически корректирующейся АСК.
Заявляемая АСК для работы на известном маршруте, блок-схема которого приведена на фиг. 2, включает в свой состав ПС1, КС2, БВПК3, БВНК4 и АУ5, причем выход ПС1 соединен с соответствующим входом БВПК3, выходы которого по ΔX и ΔY соединены с соответствующими входами АУ5, вторые входы которой соединены с выходами БВНК4 по ХН и YH, ХЭК6, ППК7, три сумматора ∑8, ∑9, ∑10, три блока разности Δ11, Δ12, Δ13 и БС14, при этом выходы АУ5 по Х и Y соединены с первыми входами ∑9, ∑10, выходы БВНК4 соединены с соответствующими входами ХЭК6, выходы которого по ΔRЭ, αЭ, ХЭ и YЭ соединены с первыми входами БС14, Δ11, Δ12 и Δ13 соответственно, вторые входы БС14 и Δ11 соединены с выходами ППК7 по ΔRПР и αПР соответственно, выход Δ11 соединен с первым входом ∑8, второй вход которого соединен с выходом КС2, а выход - с соответствующим входом БВПК3, выход БС14 соединен с управляющими входами ХЭК6, ∑8, ∑9, ∑10 и БОСМ, вторые входы ∑9 и ∑10 соединены с выходами  вторые входы Δ12 и Δ13 и входы ППК7 по Х и Y соединены с выходами ∑9 и ∑10 соответственно, являющимися выходами АСК по координатам, вход БОСМ 15 соединен с выходом Δ11, а выход является выходом АСК по сигналу схода с маршрута.
вторые входы Δ12 и Δ13 и входы ППК7 по Х и Y соединены с выходами ∑9 и ∑10 соответственно, являющимися выходами АСК по координатам, вход БОСМ 15 соединен с выходом Δ11, а выход является выходом АСК по сигналу схода с маршрута.
По принципу построения заявляемая АСК предназначена для непрерывного определения координат машины, движущейся по известному протяженному маршруту. Примерами таких транспортных средств являются машины, патрулирующие государственные границы, железнодорожный транспорт, артиллерийские и ракетные установки, движущиеся по маршрутам патрулирования, снаряды-дефектоскопы трубопроводного транспорта, машины городского транспорта. Поскольку маршруты движения известны, то на них с помощью эталонной аппаратуры можно определить координаты промежуточных точек и занести их в память ХЭК. При этом не требуется делать остановки и обозначать промежуточные точки на маршруте. Фиксация момента приближения к промежуточной точке производится путем сравнения эталонного радиус-вектора с приборным (ΔRЭ и ΔRПР), по достижении которого на выходе АСК установятся координаты ближайшей по (пути) промежуточной точки и будут откорректированы показания КС2.
При выходе на маршрут патрулирования машина останавливается на начальной точке и экипаж с помощью КС2 определяет начальное направление движения, затем в БВНК4 устанавливаются эталонные координаты начальной точки движения. Из БВНК4 координаты поступают в ППК7, ХЭК6 и через АУ5 и ∑9, ∑10 на входы приборных координат ППК7. ППК7 вычислит начальное значение радиус-вектора, равное нулю, и передаст его на вход БС14. ХЭК6 после получения значений координат начальной точки тут же передаст на БС14 и Δ11, Δ12 и Δ13 значения приращения радиус-вектора ΔRЭ, αЭ, ХЭ и YЭ ближайшей промежуточной точки маршрута.
После начала движения на выходах ∑9, ∑10 появляются приборные значения координат текущей точки: ХПР и YПР, которые тут же по линиям обратной связи поступают на входы приборных координат ППК7 и входы Δ12 и Δ13. При наличии на входах ППК7 значений ХН, YH и ХПР, YПР он вычисляет ΔRПР и αПР и передает их на входы БС14 и Δ11 соответственно. Поскольку на другие входы БС14, Δ11, Δ12 и Δ13 поступают с ХЭК6 значения ΔRЭ, αЭ, ХЭ и YЭ ближайшей промежуточной точки маршрута, то на выходах Δ11, Δ12 и Δ13 присутствуют сигналы (αЭ-αПР), (ХЭ - ХПР) и (YЭ - YПР), которые в момент равенства ΔRЭ= ΔRПР будут сложены с показаниями КС и АСК, что и обеспечивает автоматически дискретную подстройку координат, вырабатываемых АСК, и угла направления движения, определяемого КС, поправка по углу (αЭ-αПР) с выхода Δ11 поступает на вход БОСМ15, где сравнивается с заданным порогом, при превышении которого формируется сигнал "сход с маршрута" и с выхода БОСМ15 поступает потребителю.
Для определения эффективности уменьшения погрешности счисления координат с помощью заявляемой аппаратуры по сравнению с прототипом получим выражение, связывающее параметры КС и ПС с погрешностью круговых координат. Для этого воспользуемся комплексной формой представления прямоугольных координат:
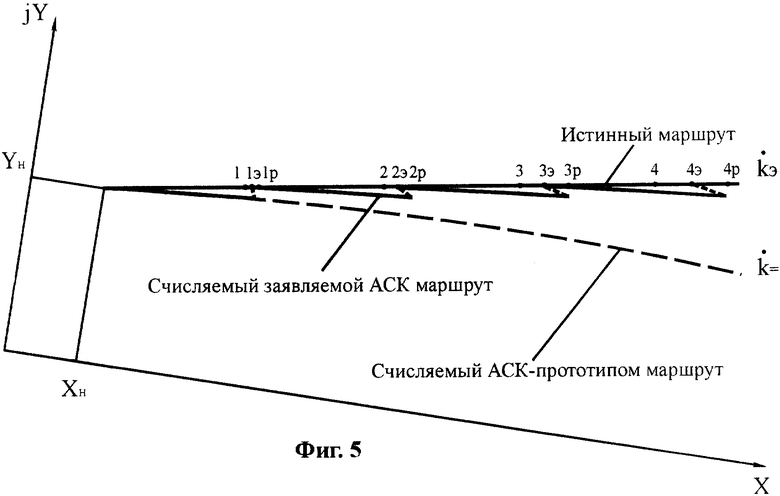
Пусть в процессе движения: δV= const, ΔαV= ΔαHO+α′•t, ΔαHO= const, α′ = const, αV= const и V = const, т.е. движение машины происходит по прямолинейной трассе с постоянной скоростью. На трассе через равные промежутки находятся промежуточные точки, место положения которых визуально не обнаруживаемо.
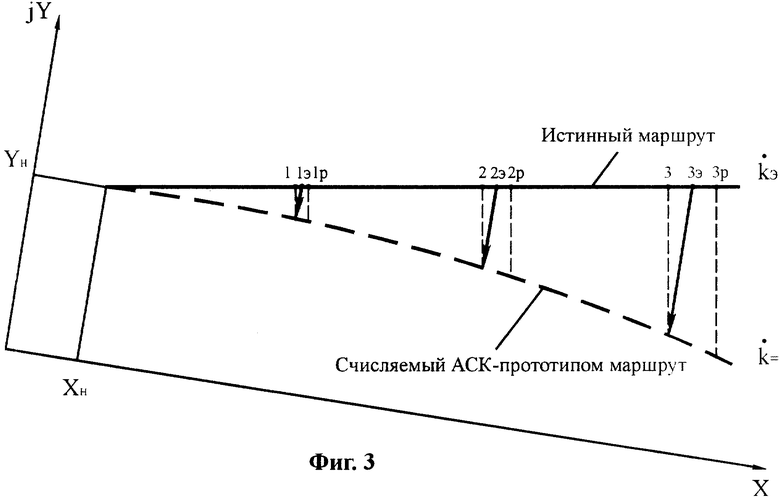
По приведенному выражению построен на фиг.3 график изменения приборных показаний АСК-прототипа. С учетом введенных условий:
На фиг. 3 горизонтальная линия - график  истинного маршрута. На нем нанесены через равные промежутки промежуточные точки, а на расстоянии δV•S от промежуточных точек нанесены точки местонахождения машины в моменты, когда SПР=SЭ(RПР=RЭ).
истинного маршрута. На нем нанесены через равные промежутки промежуточные точки, а на расстоянии δV•S от промежуточных точек нанесены точки местонахождения машины в моменты, когда SПР=SЭ(RПР=RЭ).

а соответствующая точка счисляемых координат (k=) расположена на пересечении  и перпендикуляра к S в точке S=.
и перпендикуляра к S в точке S=.
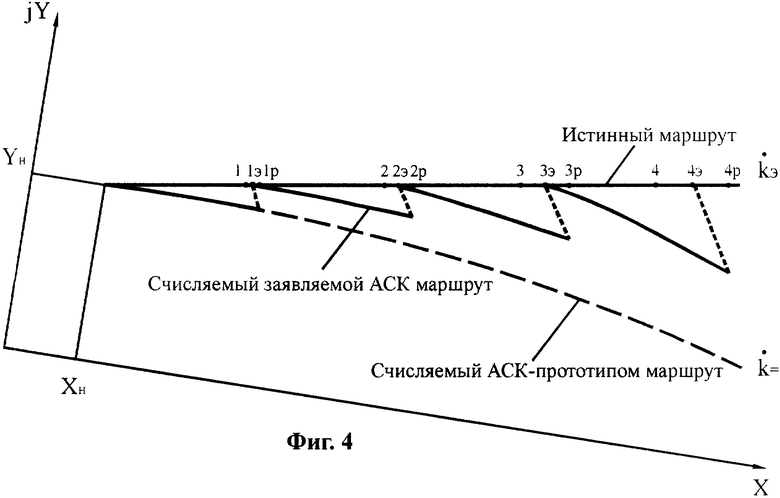
Теперь рассмотрим эффективность автоматической дискретной подстройки координат. Это означает, что момент R = Rэ счисляемые координаты k= сбрасываются на  (погрешность на ноль) в первой же промежуточной точке. При этом машина продолжает движение с той же скоростью, КС вырабатывает тот же угол, что и без автоподстройки. В момент прихода машины в точку S2(1-δV) радиус-вектор точки (S = [S2•(1-δV)]•(1+δV) = S0) совпадает по величине с соответствующим эталонным радиус-вектором и накопившиеся к этому времени поперечные погрешности снова сбрасываются. График маршрута, который можно построить на основании работы такой АСК, имеет вид пилы со все увеличивающимися "зубьями" и приведен на фиг.4.
(погрешность на ноль) в первой же промежуточной точке. При этом машина продолжает движение с той же скоростью, КС вырабатывает тот же угол, что и без автоподстройки. В момент прихода машины в точку S2(1-δV) радиус-вектор точки (S = [S2•(1-δV)]•(1+δV) = S0) совпадает по величине с соответствующим эталонным радиус-вектором и накопившиеся к этому времени поперечные погрешности снова сбрасываются. График маршрута, который можно построить на основании работы такой АСК, имеет вид пилы со все увеличивающимися "зубьями" и приведен на фиг.4.
Теперь рассмотрим АСК с автоматической дискретной (периодической) подстройкой координат и дирекционного угла.
На первой точке показания КС равны: αKC= αV+ΔαHO+α′•t, а угол радиус-вектора приборных координат αR1= αЭ+ΔαHO+α′•t, поэтому после введения поправок АСК начнет работать с
На второй точке

и в КС будет введена поправка
и ее показания, идущие на счисление координат, станут равными:
Если, начиная со второго номера введения поправок, поправку по углу увеличивать в 1,5 раза, то проезд каждого отрезка, начиная с третьего, будет проводиться с ΔαHi>3= 0 и все поперечные погрешности на всех участках (а они одинаковы) будут одинаковыми и определяться только "уходами" гироскопов КС на участках.
Отсюда видно, что заявляемая АСК обеспечивает работу на прямолинейном маршруте с погрешностями: продольной, равной δV•S, и поперечной, равной погрешности на участке корректировки (без нарастания ее, как у прототипа).
Источники информации
1. Колчинский В.Е., Мандуровский И.А., Константиновский М.И. Автономные доплеровские устройства и системы навигации летательных аппаратов - М.: Советское радио, 1975.
2. Флеров А. Г., Тимофеев В.Т. Доплеровские устройства и системы навигации. -М.: Транспорт, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ПО ДВУМ СОСТАВЛЯЮЩИМ СКОРОСТИ | 2000 |
|
RU2184348C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2013 |
|
RU2545490C1 |
| ДОПЛЕРОВСКИЙ ДАТЧИК ПРИРАЩЕНИЙ ПУТИ С УСТРОЙСТВОМ СТЕНДОВОЙ КАЛИБРОВКИ | 2003 |
|
RU2246737C1 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С НЕПРЕРЫВНОЙ КАЛИБРОВКОЙ | 2009 |
|
RU2422773C1 |
| ДАТЧИК ПРОЕКЦИЙ СКОРОСТИ С УСТРОЙСТВОМ КАЛИБРОВКИ | 2008 |
|
RU2397507C2 |
| КОМПЛЕКСИРОВАННЫЙ ДОПЛЕРОВСКИЙ МОДУЛЬ | 2001 |
|
RU2212686C2 |
Аппаратура предназначена для использования в области навигации наземных транспортных средств. Технический результат - увеличение точности счисления координат при снятии ограничений на длительность движения и длину заданного маршрута. Аппаратура содержит путевую систему, курсовую систему, блок вычисления приращений координат, блок ввода начальных координат и арифметическое устройство. Дополнительно введены хранитель эталонных координат, преобразователь приращений координат, блок сравнения, блок обнаружения схода с маршрута, три сумматора и три блока разности. 5 ил.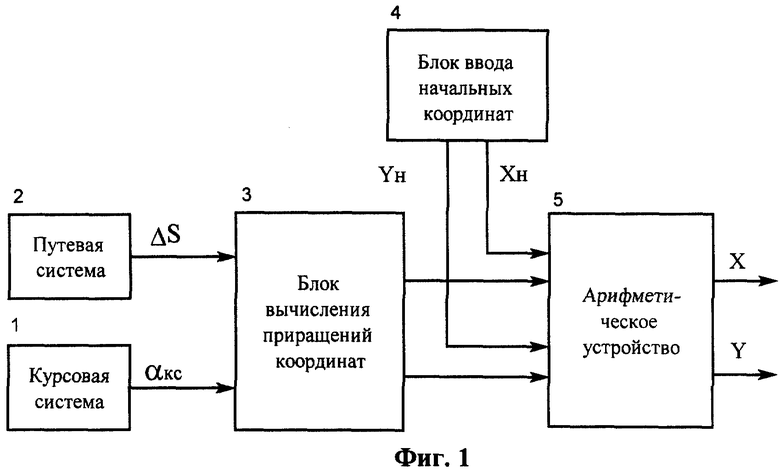
Аппаратура счисления координат с автоматической коррекцией показаний, состоящая из путевой системы, курсовой системы, блока вычисления приращений координат, блока ввода начальных координат и арифметического устройства, причем выход путевой системы соединен с соответствующим входом блока вычисления приращений координат, выходы которого по приращениям координат ΔX и ΔY соединены с соответствующими входами арифметического устройства, вторые входы которого соединены с выходами блока начальных координат по координатам ХН и YН соответственно, отличающаяся тем, что в нее введены хранитель эталонных координат, преобразователь приращений координат, блок сравнения, блок обнаружения схода с маршрута, три сумматора и три блока разности, при этом выходы арифметического устройства соединены с первыми входами второго и третьего сумматора, вторые входы которых соединены с выходами второго и третьего блоков разности соответственно, выходы блока ввода начальных координат соединены с соответствующими входами хранителя эталонных координат и преобразователя приращений координат, выходы хранителя эталонных координат по эталонным значениям координат промежуточных точек соединены с первыми входами второго и третьего блоков разности соответственно, а выходы по модулю и углу эталонного радиус-вектора промежуточных точек соединены с первыми входами блока сравнения и первого блока разности соответственно, вторые входы блока сравнения и первого блока разности соединены с выходами преобразователя приращений координат по модулю и углу приборного радиус-вектора соответственно, выход курсовой системы соединен с первым входом первого сумматора, выход которого соединен с соответствующим входом блока вычисления приращений координат, выход первого блока разности соединен с вторым входом первого сумматора и с входом блока обнаружения схода с маршрута, выход которого является выходом аппаратуры, выход блока сравнения соединен с управляющими входами хранителя эталонных координат, первого, второго, третьего сумматоров и блока обнаружения схода с маршрута, выходы второго и третьего сумматоров соединены с соответствующими входами преобразователя и вторыми входами второго и третьего блоков разности и являются выходом всей аппаратуры по координатам.
| Навигационный счислитель координат | 1989 |
|
SU1820218A1 |
| DE 3033279 А1, 11.11.1982 | |||
| СПОСОБ КОРРЕКЦИИ И НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ СЧИСЛЕНИЯ ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2151379C1 |
| Устройство для определения координат | 1989 |
|
SU1753275A1 |

