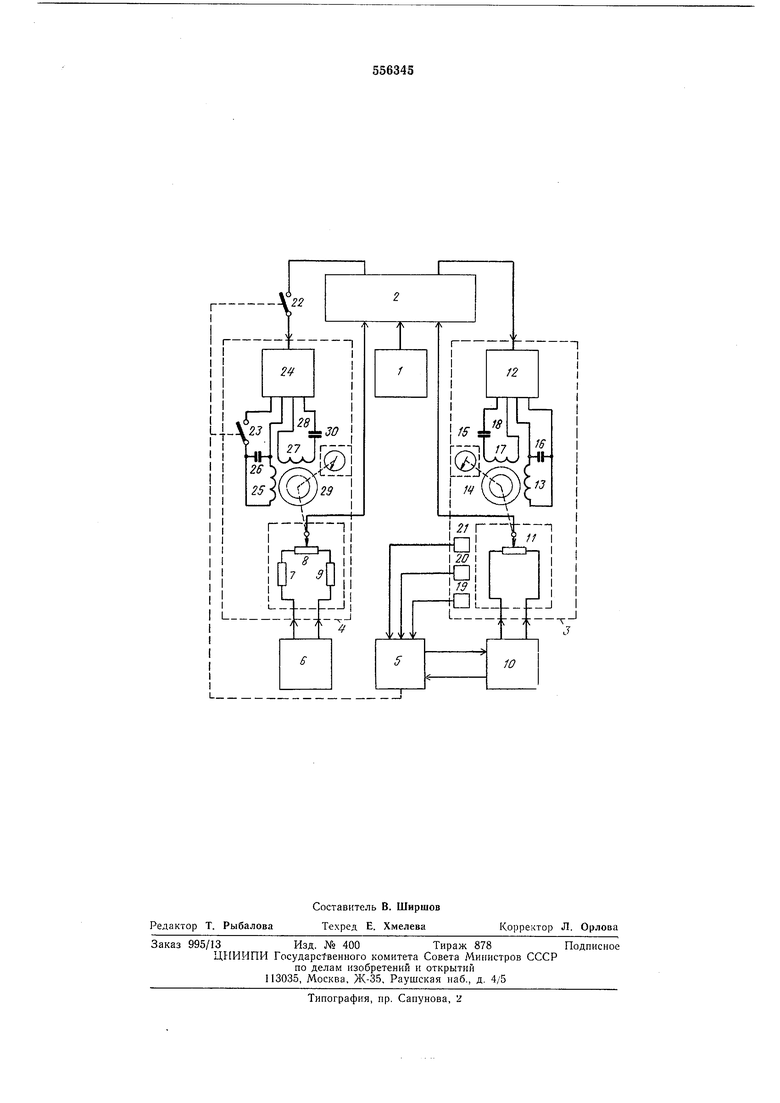
Балансный автокомпенсатор 4 состоит из узла питания 24 с фазочувствительным усилителем постоянного тока, к выходу которого подключена управляющая обмотка 25, шунтированная конденсатором 26. Обмотка 2/ через фазосдвигающий конденсатор 28 запитана переменным напряжением от узла питання 24. Ротор балансирующего электродвигателя 29 кинематически связан со стрелкой указательного прибора 30 и с двилгком реохорда 8.
Источник компенсационного напряжения 6 подает в цепь отрицательной обратной связи, состоящей из резистора 7, балансного реохорда 8 и резистора 9, сигнал такой величины, чтобы можно было скомпенсировать вес тары и суммарный сигнал при наборе всех компонентов. Задатчик 10 по команден блока управления 5 подает на реохорд И напряжение, которое каждый раз соответствует ожидаемому приросту напряжения весовых датчиков 1.
Работает устройство следующим образом.
В исходном положении весовые датчики 1 нагружены только весом грузоприемной емкости (пустой бадьи), и их выходное напряжение подано на один из входов сумматора 2. Для компенсации этого напрял ения к выходу сумматора 2 контактом 22 подключают вход фазочувствительиого усилителя узла питания 24, предварительно отключив от сумматора фазочувствительный усилитель узла питания 12. Контакт 23 блока управления 5 при этом замкнут. Затем подбором величины резистора 7 добиваются, чтобы падение напряжения на нем было равно выходному напряжению весовых датчиков 1. При полной загрузке бадьи всеми компонентами падение напряжения на балансном реохорде 8 должно быть достаточным, чтобы скомпенсировать суммарный выходной сигнал весовых датчиков 1. Подбором величины резистора 9 устанавливают стрелку указательного прибора 30 на конечное (максимальное) деление шкалы. Затем схему восстанавливают, подключая один из выходов сумматора 2 к входу фазочувствительного усилителя узла питания 12, а другой выход контактом 22 отключают от входа фазочувствительного усилителя )зла питания 24. Контакт 23 блока управления 5 при этом размыкается.
Перед началом дозировки компонентов движок реохорда 8 и движок реохорда И занимаю г исходное положение и связанные с ними стрелки указательных приборов 30 и 15 находятся на нулевых делениях шкалы. Сигнал, поступающий с датчика 19 на вход блока управления 5 подготавливает схему к началу дозирования первого компонента. При этом с задатчика веса 10 на вход измерительного реохорда 11 подается напряжение, величина которого равна выходному напряжению с весовых датчиков 1 при достижении дозируемым компонентом заданного веса. После этого с блока управления 5 подается команда на загрузку первого компонента.
Папример, вес первого дозируемого компонента - литейного коксового чугуна - равен 300 кг. На выходе весовых датчиков 1 нри взвешивании 300 кг напряжение 0,6 в и напряженне отрицательной обратной связи, подаваемое с задатчика 10 на вход измерительного реохорда II также равно 0,6 в. По мере увеличения веса дозируемого компонента увеличивается выходное напряжение весовых датчиков 1, которое поступает на один из входов сумматора 2 и далее на вход фазочувствительного усилителя узла нитання 12 измерительного автокомпенсатора 3. Это приводит к увеличению вращающего момента двигателя 14, ротор которою связан с движком реохорда 11 и стрелкой указательного прибора 15.
С приближением веса компонента к заданному с датчика 20 на вход блока управления
5 поступает команда на уменьшение производительности питателя. Когда же вес дозируемого компонента становится равным заданному, движок реохорда 11 занимает конечное (крайнее) положение, и напряжение, снимаемое с него, равно напряжению, установленному задатчнком веса 10, т. е. 06 в. При этом стрелка указательного прибора 15 перемещается на конечное (максимальное) деление шкалы. С датчика 21 на вход блока управлення 5 поступает команда на прекращение дозирования. Одновременно с этим контактами 22 и 23 к сумматору 2 подключается балансный автокомпенсатор 4, и начинается нроцесс компенсации набранного веса. Теперь выходной сигнал весовых датчиков 1, поступавший ранее только на измерительный автокомненсатор 3, одновременно поступает и на балансный автокомпенсатор 4. 1 апряжение на выходе фазочувствнтельного усилителя узла пнтання 24 возрастает, в результате чего возникает вращающий момент балансирующего двигателя 29. Происходит поворот ротора двигате.пя н связанных с ним движка балансного реохорда 8 н стрелки указательного прибора
30 на угол, пропорциональный весу первого компонента. Одновременно с этим уменьшается уровень сигнала, поступающего с выхода сумматора 2 на вход фазочувствительного уснлителя узла питания 12. Движок реохорда 11
и стрелка указательного прибора 15 приближаются к исходному (нулевому) положению. При полной компенсации выходного сигнала весовых датчиков 1 балансным автокомпенсатором 4 сигнал на входе измерительного автокомпенсатора 12 становится равным нулю. Стрелка указательного прибора 15 занимает положение, соответствующее нулевой отметке шкалы, и с бесконтактного датчика 19 в блок управления 5 поступает сигнал об окончании
процесса автокомненсации веса первого дозируемого компонента. После этого размыкаются контакты 22 и 23 блока управления 5, отключая оалансный автокомненсатор 4 от сумматора 2. Схема подготовлена к дозированию
следующего компонента.
Пусть следующим компонентом будет 45%ный ферросилиций весом 15 кг. На выходе весовых датчиков 1 в соответствии с этим весом находится напряжение 0,03 в. По команде с блока управления 5 задатчик веса 10 подает на реохорд 11 напряжение и,03 в. Для комненсации этого напряжения измерительному комненсатору 3 необходимо с помощью балансирующего двигателя 14 переместить движок реохорда 11 в такое положение, чтобы снять с пего напряжение 0,03 в, а это возможно только в том случае, когда движок и связанная с ним стрелка указательного прибора 15 займут конечное (максимальиое) положение. 1аким образом, здесь полное отклонение стрелки указательного прибора 15 и конечное деление его щкалы соответствуют весу дозиpyeMOio компонента 15 кг. Далее происходит процесс автокомпенсации веса второго дозируемого компонента аналогично.
iiycTb третьим дозируемым компонентом будут литники, вес которых bDl кг. Нму соответствует выходное напряжение весовых датчиков 2,1 в. Величина напряжения отрицательной обратной связи, подаваемая па реохород И также равна 2,1 в. Для компенсации выходного напряжения весовых датчиков 1 измерительному автокомпенсатору 3 необходимо с помощью балансирующего двигателя И передвину гь движок реохорда 11 в положение, соответствующее напряжению па нем 2,1 в. И в этом случае движок реохорда 11 и связанная с ним стрелка указательного прибора 15 займут конеч1юе (максимальное) положение при подмой компенсации выходного сигнала весовых датчиков 1.
Вы.ходное капряжепие фазочувствительного усилителя узла питапия 12 измерительного автокомпенсатора 3 имеет в каждом из трех случаев одну максимальную величину Овых, достаточную для того, чтобы в балансирующем двигателе 14 создать максимальный вращающий момент и переместить движок реохорда 11 н связанпую с ним стрелку указательного прибора 15 таким образом,чтобы опи заняли конечное (максимальное) положение.
Входное же напряжение фазочувствительного усилителя узла питания 12 - величина переменная и равна в каждом отдельном случае ожидаемому приросту выходного напряжения весовых датчиков 1 при дозировании различных компонентов.
В первом случае ,б в, во втором ,03 в, в третьем (,1 в.
Тогда коэффициент усиления по напряжению измерительного автокомпенсатора 3 соответственно определяется как
Так как бвых - величина постоянная, примем 10 ее равной 1, тогда
33,2;
К.
0,03
К, - 0,476.
Следовательно коэффициент усиления по напряжению измерительного автокомпенсатора 3 есть величина переменная, и он тем больше, чем меньше вес дозируемого компонента. Это нозволяет значительно повысить точность взвешивания комнонентов, особенно при малых дозах последних.
Формула изобретения
Устройство для многокомпонентного весового дозирования, содержащее датчики веса, подключенные совместно с измерительным и балансным автокомпенсаторами к сумматору напряжений, источник компенсационного напряжения, блок управления 1 задатчик доз
компонентов, отличающееся тем, что, с пелью поиыщення точности путем ипдикации пабора дозы каждого из компонентов на конечном значении щкалы измерительного автокомпенсатора, в нем выходной реохорд измерительного автокомпенсатора подключен к выходу задатчика доз компонентов, коммутируемому блоком управления, входы которого подключены к выходам измерительного автокомнепсатора.
Источники информации, принятые во внимание при экспертизе
1.Авт. св. № 194348, кл. G Gig 19/30, 16.12.65.
2.Патент ФРГ jYg 1198577, кл. 42f 34/08, 1965.
3.Патент ФРГ № 1251969, кл. 42f 25/02, 1967.
4.Карпин Е. Б. Средства автоматизации для измерения и дозирования массы. М., «Машиностроение, 1971, с. 117-127.
5.Авт. св. № 371454, кл. G Olg 23/36, 16.11.70.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство | 1977 |
|
SU664045A1 |
| БИБЛИОТЕКА J | 1973 |
|
SU371454A1 |
| Весоизмерительное устройство | 1976 |
|
SU569870A1 |
| Способ потележечного взвешивания вагонов на ходу | 1982 |
|
SU1016688A1 |
| Устройство управления весовым непрерывным дозированием | 1977 |
|
SU746199A1 |
| Сомакорректирующийся весовой дозатор | 1978 |
|
SU697831A1 |
| Устройство для измерения веса шихты в скиповом подъемнике | 1981 |
|
SU1016689A1 |
| Устройство для автоматической сушкиКОВшЕй | 1979 |
|
SU827923A1 |
| Устройство для автоматического взвешивания и порционного дозирования | 1976 |
|
SU619804A1 |
| Тензометрические весы | 1982 |
|
SU1084619A1 |
LJ
-V
