И-.-.ооретеиие относится к управлению n)i;Lio;.,avrH строительных машин, например о дисков: поцьтх VI пи вскрышных экскаваторов.
liaBecTsn способ управления приводами иодьема и напора, заключающийся в изме- НОЛИ; напряжения преобразователей, питаюшвх двигатели этих приводов, при этом зиачен1.:е максимальной скорости приводов подъема и наггора не зависит от характера сьл.олкка: ibix опарсщий с-жскаваторного цик- ла jlj „ Величина этой скорости определяется комкиальньПЛ значением напряжения преоСразоБателей, питающих двигатели прииодов копающих механизмов.
Известен способ у1гравле1шя приводами копающих механизмов, в котором управление приводами копающих механизмов осуществляется путем изменения напряжения преобразователей, питающих двигатели ириБодэа подъема и напора 2 . Ослабление по.1я двигатепей предусматривает-ся только д.гт привода гюдъема в режиме опускания ковата Падостатком тгзвестного способа управления П.эг1йсхаа.1и копающ75Х механизмов одноковшового экскаватора является недоиспользование мощности приводных двигателей приводов напора и подъема из-за пониженнной скорости в режиме копания и из-за малой нагрузки на механизмы при выполнении транспортных операций по переносу ковща,
С целью повышения производительности экскаватора по статическому моменту привода подъема и напора определяют характер выполняемой операции экcкaвaтopнol o цикла и в зависимости от величины статического момента привода увеличивают магнитный поток при выполнении операции копания и ослабляют его при транспортных операциях.
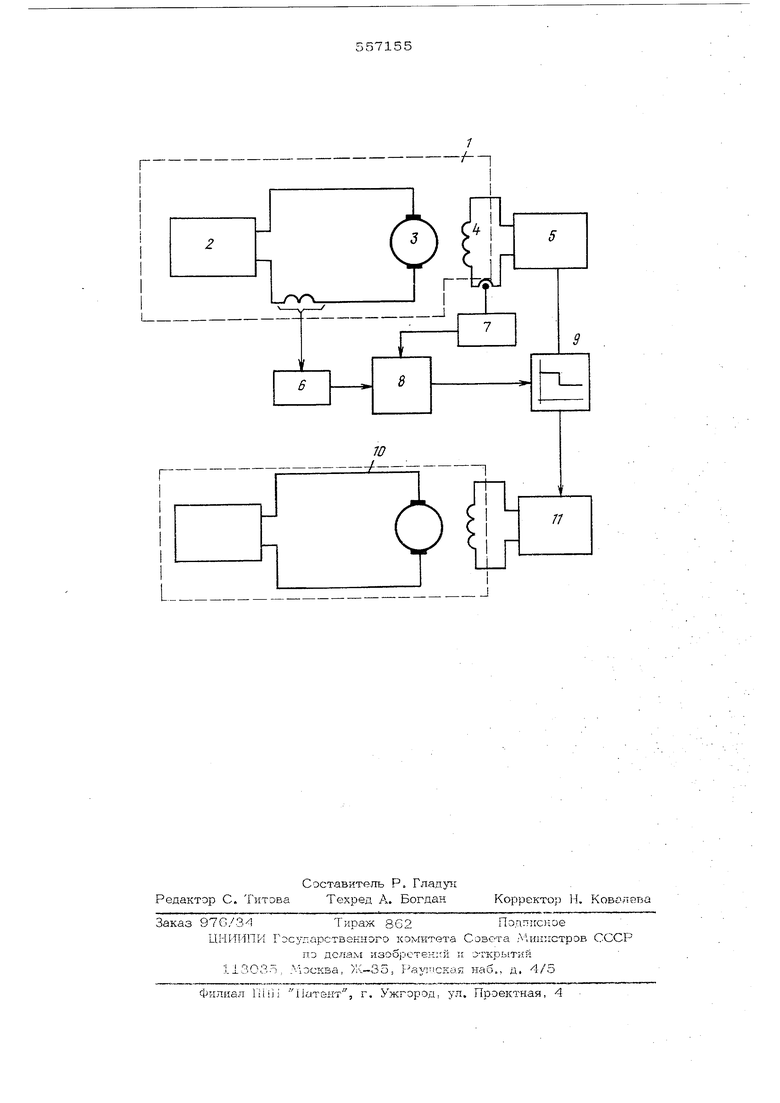
На чертеже изображено устройство, иллюстрирующее существо предлагаемого способа.
Устройство, реализующее предлагае1--чьп-1 способ, включает в себя привод подъема 1 с системой управления и преобразователем 2 для питания двигателя 3 с обмоткой возбуждения 4, подключенной к регулятору возбуждения 5, датчик статического
G м датчик тока возбуждения 7, подключенные к входам множительного устрэйства 8, выход которого подсо-единен к регулятору управления 9, привод напора 10 и регулятор возбуждения двигателя напора 11. Способ заключается в следующем
Е еличина статического усилия привода подъема в достаточной степени определяет характер вьпIOЛня9 Ioй опарации экскаваторного цикла. При копании статическое усилие привода соответствует зоне отсзчки ил крутопадающему j-частку механической характеристики привода, а при выполнении транспортной операции по переносу ковша не превышает веса груженого ковша с грунтом.
Статический момент привода подъема определяется как
-- -Ф
ст.г, ст.
АВ -постоянный коээффициент; -статический ток привода подъе - магнитный поток двигателя подъема. Диапазон регулирования магнитного пот ка двигателей подъема позволяет считать с допусти. погрешностью ток возбужде ния двигателя подъема пропирццопальным его магнитному потоку. Поэтому величину статического момента двигателя подъема 3 можно определить с помощью множительного устройства 8, входами соединенного с датчиком статт-гческого тока 6 привода подъема 1 и датчика тока возбуждения 7 двигателя подъема 3. Сигнал,,пропорциональный статическому моменту привода подъема, поступает с мно жительного устройства 8 на регулятор управления скоростью 9. Регулятор управлени скоростью 9 1астр,-:-1квается таким образэм,
что при статическом привода подъема большем, чем при нагрузке, соответствующей весу груженого ковша, магнитный поток двигателей приводов усиливается,. При нагрузке на привод подъема, меньшей веса гружепого ковша, магнитный поток двигателей приводов подъема и напора одновременно ослабляется, что вызывает увеличение скорости при транспортировке ковша.
Использование предлагемого способа уг:равления проводам51: копающих механизмов позволяет сократить длительность транспортных операций за счет повыщенных скоростей указанных приводов и ул-геньшить Бре,мя копания за счет усиления момента двигателей подъема и напора. Сокращение длительности цикла приводит к увеличению производительности экскаваторов. б р е т е Формул Способ управления приводами копающих механизмов одноковшового экскаватора путе,. изменения напряжения преобразователей, отличающийся тем, что, с целью повышения производительности эксм,;:)в тора, по статическому моменту приводов подъема и напора определя от характер выполняемой операции экскаваторного цикла и 3 зависимости от величины статического момента привода увеличивают магн11тный поток при выполнении операции копания и ослабляют его при транспортных операциях, Источники информации, принятые зо вплмание при экспертизе: 1.Подерни Р, Ю. Горные машины и комплексы для открытых работ. /U, Педра; 1971, с. 218-220. 2,Сатовский Б. И и др. Соврет.-гпгые карьорыые экскаваторы.М,, Недра, с, 3 8-4 2 (пр ототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| Способ управления копающими механизмами экскаватора в транспортном режиме | 1985 |
|
SU1240839A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU613037A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1975 |
|
SU595463A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1986 |
|
SU1425284A2 |
| Способ управления процессом копания одноковшового экскаватора | 1978 |
|
SU732465A1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИНАМИЧЕСКИХ УСИЛИЙ В МЕХАНИЗМЕ ЭКСКАВАТОРА | 1991 |
|
RU2007533C1 |
| Устройство для управления процессом компания одноковшового экскаватора | 1976 |
|
SU617546A1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |