(Л
4
to
СП
ю
00 4
N)
3 и напора 10, логическим блоком (ЛБ) 21 определения операции копа- Ния, интегратором И 18 и включенным и цепь его обратной связи стабилитро- 19. Выходы датчика 20 и ЛБ 21 под-/ 1 лючены ко входам И 18, выход которого соединен с входом однополярного усилителя 13. Командоаппараты 16 и 17 подключены к входам регуляторов 2 и 7 напряжения систем 1 и 6 управления П 5, 10 и к двум входам ЛБ 21. Третий вход ЛБ 21 подключен к выходу iaтчикa 11 нагрузки П 5 подъема. Напряжение с датчика 11 действует истречно сигналу с источника 15 по- с;тоянного напряжения, пропорциональ- ifoMy заданному значению нагрузки
П 5 подъема. Сигнал с вькода усилителя 13 действует в сторону увеличения выходного сигнала второго одно- полярного усилителя 14, подключенного к регулятору 8 тока напора. При копании сигнал с выхода ЛБ 21 снимается и И 18 деблокируется, на его вход поступает сигнал только с датчика 20. Сигнал на выходе И 18 пропорционален пути ковша при наполнении его грунтом. Ограничение макс, сигнала на выходе И 18 обеспечивается включенным в его обратную связь стабилитроном 19. Выходной сигнал И 18, поступающий на вход усилителя 13, увеличивает значение стабилизируемого усилия П 5 подъема. 1 з.п.ф-лы, 3 ил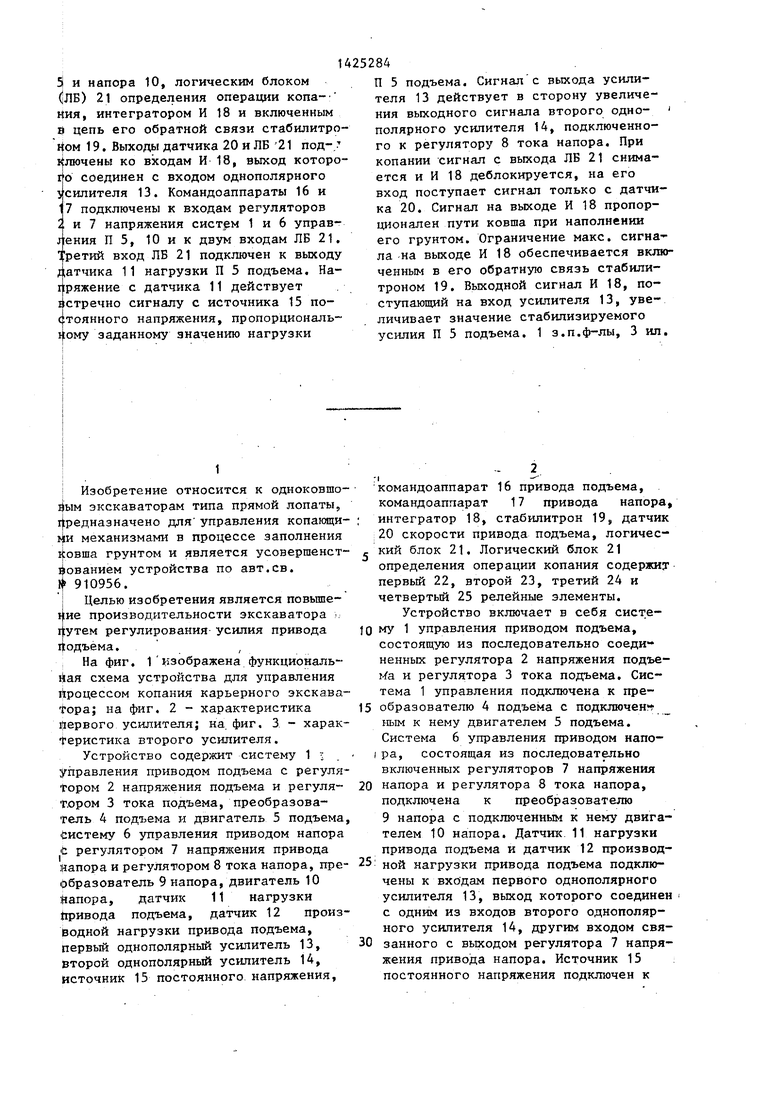


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1989 |
|
SU1624097A2 |
| Устройство для управления процессом копания карьерного экскаватора | 1980 |
|
SU910956A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Устройство для управления приво-дОМ пОВОРОТА КОВшА эКСКАВАТОРА | 1979 |
|
SU810913A1 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Устройство для управления процессом копания экскаватора-дреглайна | 1984 |
|
SU1182127A2 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |

1
Изобретение относится к одноковшовым экскаваторам типа прямой лопаты, г редназначено для управления копанщи- 1)и механизмами в процессе заполнения йовша грунтом и является усовершенствованием устройства по авт.св. if 910956.
I Целью изобретения является повьше- пие производительности экскаватора ). путем регулирования усилия привода цодъема.
На фиг. 1 изображена функциональ- Йая схема устройства для управления процессом копания карьерного экскаватора; на фиг. 2 - характеристика йервого усилителя; на. фиг. 3 характеристика второго усилителя.
Устройство содержит систему 1 ; управления приводом подъема с регуля- topoM 2 напряжения подъема и регуля- Т-ором 3 тока подъема, преобразователь 4 подъема и двигатель 5 подъема, Систему 6 управления приводом напора t регулятором 7 напряжения привода йапора и регулятором 8 тока напора, пре- (йбразователь 9 напора, двигатель 10 йапора, датчик 11 нагрузки йривода подъема, датчик 12 производной нагрузки привода подъема, первый однополярный усилитель 13, Второй однополярный усилитель 14, источник 15 постоянного напряжения.
командоаппарат 16 привода подъема, командоаппарат 17 привода напора
I интегратор 18, стабилитрон 19, датчик 20 скорости привода подъема, логичес- с КИЙ блок 21. Логический блок 21
определения операции копания содержит первый 22, второй 23, третий 24 и четвертый 25 релейные элементы.
Устройство включает в себя сист.е10 МУ 1 управления приводом подъема, состоящую из последовательно соеди ненных регулятора 2 напряжения подъе- i-fa и регулятора 3 тока подъема. Система 1 управления подключена к пре
15 образователю 4 подъема с подключена ным к нему двигателем 5 подъема. Система 6 управления приводом напо- I ра, состоящая из последовательно включенных регуляторов 7 напряжения
20 напора и регулятора 8 тока напора, подключена к преобразователю 9 напора с подключенным к нему двигателем 10 напора. Датчик 11 нагрузки привода подъема и датчик 12 производ25: ной нагрузки привода подъема подключены к входам первого однополярного усилителя 13, выход которого соединен с одним из входов второго однополярного усилителя 14, другим входом свя30 занного с выходом регулятора 7 напряжения привода напора. Источник 15 постоянного напряжения подключен к
входам первого 13 и второго 14 усилителей.
Командоаппарат 16 подъема связан выходом с системой 1 управления, Командоаппарат 17 напора - с системой 6 управления приводом напора. К входу интегратора 18, соединяющего в обратной связи стабилитрон 19, подключены выходы датчика 20 скорости привода подъема и логического блока 21. Логический блок 21 содержит первый 22 релейный элемент, входом подключенный к датчику 11 нагрузки приода подъема, второй 23 релейный ант, связанный с выходом командоап- парата 16 подъема, третий 24 релейный элемент, входом соединенный с выходом командоаппарата 17 напора, и четвер25
30
тый релейный, элемент 25, входами под-20 ние на выходе первого усилителя 13 ключенный к выходам первого 22, второго 23 и третьего 24 релейных эле- . ментов, а выходом - к входу интегратора 18.
Устройство работает следующим образом.
При отсутствии сигналов на входе первого усилителя 13 его характеристика имеет вид 26а. (фиг. 2). Напряжение, снимаемое с источника 15 постоянного напряжения, действует в сторону уменьшения выходного напряжения усилителя 13, т.е. смещает его характеристику в положение 266. Напряжение с датчика 11 нагрузки привода подъема действует встречно сигналу с источника 15 постоянного.напряжения. Сиг- нйл, снимаемый с источника 15 постоянного напряжения, пропорционален заданному значению нагрузки привода подъема. Это значение нагрузки выбирается равным (0,8-0,9) от величины усилия, соответствующего зоне отсечки механической характеристики привода. При нагрузке на привод подъема больше заданной на выходе первого усилителя 13 появляется сигнал, а при нагрузке на привод подъема меньше заданной выходной сигнал этого усилителя равен нулю. Напряжение с выхода первого усилителя 13 поступает на вход второго усилителя 14, имеющего при отсутствии сигналов на его входе характеристику 27а (фиг. 3). Напряжение с источника 15 постоянного напряжения действует в сторону уменьшения выходного сигнала этого усилителя и смещает характеристику усилителя 14 в положение 276.
больше сигнала на выходе регулятора 7 напряжения, измеренного от максимального значения, действующего на втягивание рукояти. Если же этот си нал больше напряжения на выходе пер вого усилителя 13, то напряжение на выходе второго усилителя 14 равно нулю. Таким образом, результирующий сигнал на входе регулятора тока рав наибольшему из двух: сигналу с выхо да первого усилителя 13 или сигналу с выхода регулятора 7 напряжения.
При превьш1ении нагрузкой привода подъема заданного значения на вход эг регулятора 8 тока поступает сигнал, уменьшающий давление рукояти на забой или реверсирующий напорное усилие.
Заданное значение усилия привода подъема определяется суммой сигнало с выхода источника 15 постоянного напряжения и с выхода интегратора 18. Этот интегратор во всех операциях экскаваторного цикла, кроме операции копания, заблокирован сигналом с логического блока 21. В момент начала-операции копания сигнал с выхода логического блока 21 снима ется и интегратор деблокируется. Поскольку на вход интегратора 18 в этом случае поступает только сигнал с выхода датчика 20 скорости привод подъема, то сигнал на выходе интегр тора 18 пропорционален пути, проходимому ковшом при наполнении его грунтом. Параметры интегратора выби раются таким образом, чтобы за весь путь наполнения ковша грунтом напря жение на его выходе достигало (0,240
45
50
55
Максимальный сигнал с выхода регуля тора 7 напряжения системы 6 управле ния приводом напора смещает характеристику второго усилителя 14 иэ положения 276 вправо в положение 27в,, если полярность регулятора 7 напряжения соответствует моменту двигателя 10 напора, направленному на втягивание рукояти, и влево в положение 27а - если момент двигателя напора действует на вьщвьшение рукояти.
Сигнал с выхода первого усилителя 13 действует в сторону увеличения
выходного сигнала усилителя 14.
Входные параметры второго усилителя 14 рассчитываются таким образом, что сигнал на его выходе равен разности входных сигналов, если напряже5
0
0 ние на выходе первого усилителя 13
больше сигнала на выходе регулятора 7 напряжения, измеренного от максимального значения, действующего на втягивание рукояти. Если же этот сигнал больше напряжения на выходе первого усилителя 13, то напряжение на выходе второго усилителя 14 равно нулю. Таким образом, результирующий сигнал на входе регулятора тока равен наибольшему из двух: сигналу с выхода первого усилителя 13 или сигналу с выхода регулятора 7 напряжения.
При превьш1ении нагрузкой привода подъема заданного значения на вход г регулятора 8 тока поступает сигнал, уменьшающий давление рукояти на забой или реверсирующий напорное усилие.
Заданное значение усилия привода- подъема определяется суммой сигналов с выхода источника 15 постоянного напряжения и с выхода интегратора 18. Этот интегратор во всех операциях экскаваторного цикла, кроме операции копания, заблокирован сигналом с логического блока 21. В момент начала-операции копания сигнал . с выхода логического блока 21 снимается и интегратор деблокируется. Поскольку на вход интегратора 18 в этом случае поступает только сигнал с выхода датчика 20 скорости привода подъема, то сигнал на выходе интегратора 18 пропорционален пути, проходимому ковшом при наполнении его грунтом. Параметры интегратора выбираются таким образом, чтобы за весь путь наполнения ковша грунтом напряжение на его выходе достигало (0,20
5
0
5
5
0,25) значении сигнала, снимаемого источника 15 постоянного напряжени
Ограничение максимального сигна На выходе интегратора 18 достигает включением в его обратную связь атабилитрона 19.
Таким образом, сигнал, подаваемый с выхода интегратора 18 на вхо п:ервого усилителя 13 увеличив яет
начение стабилизируемого усилия 11ривода под ьемаг обеспечивая т самым постоянство толщины стружки грунта снимаемой ковшом в процесс сопания.
Функционирование логического
С лока 21J деблокирующего интегратор на время операции копания, основано на следующем.
При выполнении операции копания kaшиниcт устанавливает командоаппа- рат 17 напора в крайнее положение
На выдвюкение рукояти,, а командо™ Аппарат 16 подъема -, в крайнее поло лсение На подъем ковша.
Поскольку такое положение команд ппаратов возможно и при вь полнении ilpaHcnopTHbix операций по переносу ко ковша, то для выявления операции копания необходима еще дополнитель- iaя инфор1-гация Такой информацией служить усилие, развиваемое зиводом подъема Это усилг е в провесе копания- превышает усилиез не- о|бходимое дпя подъема груженого козпри выполнении транспортной операции. Таким образом, логический блок выявляет операцию копания по информации о нагрузке привода подъема и п величине сигналов на выходе комаи дЬаппаратов подъема и напора.
Сигнал с датчика 11 нагрузки привода подъема поступает на первый релейный элемент 22. При нагрузке подъема, большей веса груженого ковша, на выходе первого релейного элемента 22 имеется напряжение;, а при нагрузке подъема, меньшей веса груженого ковшад напряжение равно нулю,
Аналогично на выходах второго 23 и третьего 24 релейньк элементс-и сигналы ПОЯВЛЯЮТСЯ только в том случае, если командоаппараты подъема 16 и напора 7 находятся в крайне . положении соответственно На ио,,. ковша и На вьщвижение рукояти ,, При наличии сигналов на выхода первого 22, второго 23 и третьего 2А релейных элементов напряжение на
выходе четвертого релейного элемента 25 равно нулю, интегратор 18 деблокирован и напряжение на его выходе при движении привода подъема возрастает.
Если же на выходе одного из трех первых релейных элементов 22 - 24 пропадает напряжение, что свидетель - ствует об окончании или прерывании операции копания, то на выходе четвертого релейного элемента 2Ь появляется сигнал. Этот сигнал, имеющий полярность, обратную полярности выходного напряжения датчика 20 скорости подъема при подъеме ковша, с большим коэффициентом усиления поступает на интегратор 18,, уменьшая до нуля напряжение на его выходе. Однополярное напряжение на выходе интегратора 18 достигается включением в его обрат- и:/1о связь стабилитрона 19.
Системы управления приводами подъе-, ма 1 и напора 6 заполняются двухкон- турнььми, подчиненного регулирования.
Регуляторы 2 к 7 напряжения могут быть выполнены пропорциональными, а регуляторы 3 и 8 тока - пропорционально-интегральными.
На базе операционных усилителей, например серии К551УД2, могут быть реализованы первый и второй одно- полярные усилители с насыщением. Командоаппараты 16 и 17 ,для управления главными электроприводами выполняются бесконтактными.
Первый 22, второй 23, третий 24 и четвертый 25 релейные элементы и интегратор 18 могут быть реализованы на базе операционных усилителей.
Стабилитрон 19 может быть принят, например, типа Д 814.
В качестве датчика 20 скорости при}зода подъема может использовать- ся датчик ЭДС двигателя.
Датчик 12 нагрузки привода подъема может быть реализован на базе операционных усилителей как датчик упругого момента.
Формула изобретения
1, Устройство для управления про- цессом копания карьерного экскаватора по авт.св. № 910956, о т л и - ч 3 ю ш е е с я тем, что, с целью псзышения производительности экскаватора, оно дополнительно снабжено
%«
%
Фм.2
ивж
| Устройство для управления процессом копания карьерного экскаватора | 1980 |
|
SU910956A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
