1
Изобретение относится к области медицины, в частности к протезированию.
Известен способ управления протезом с внешним источником энергии, при котором в качестве источника управляющих сигналов используют контактный датчик, установленный непосредственно на протезе 1.
Однако при смеп1,ении протеза, неизбежно возникающем при работе им, относительно мышечного канала может происходить самопроизвольное срабатывание датчика, а повышение помехозащитности путем увеличения усилия, необходимого для срабатывания датчика, ведет к чрезмерной нагрузке на стенки мышечного канала и не позволяет использовать ослабленные мышцы культей.
Целью изобретения является исключение ложных срабатываний протеза, а также возможность использования ослабленных мышЦ культей конечностей для управления протезом. Это достигается тем, что создают оперативным путем мышечный канал, в который помещают датчик, например контактный, и соединяют датчик с электроприводом протеза.
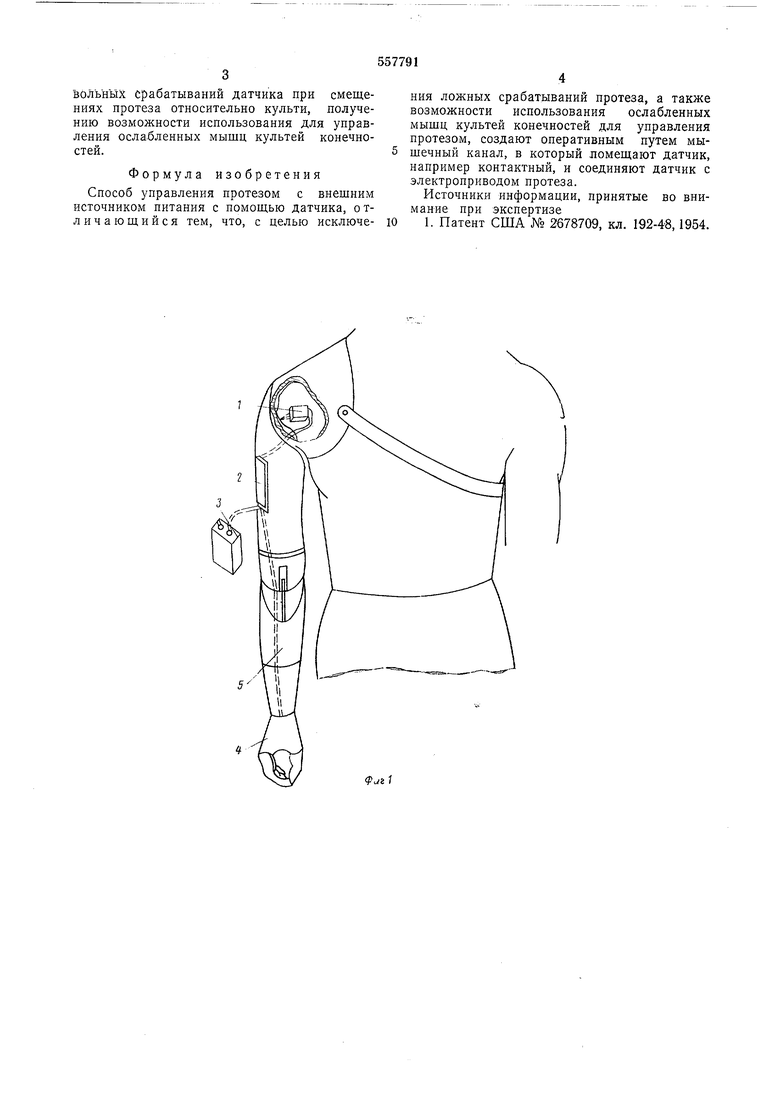
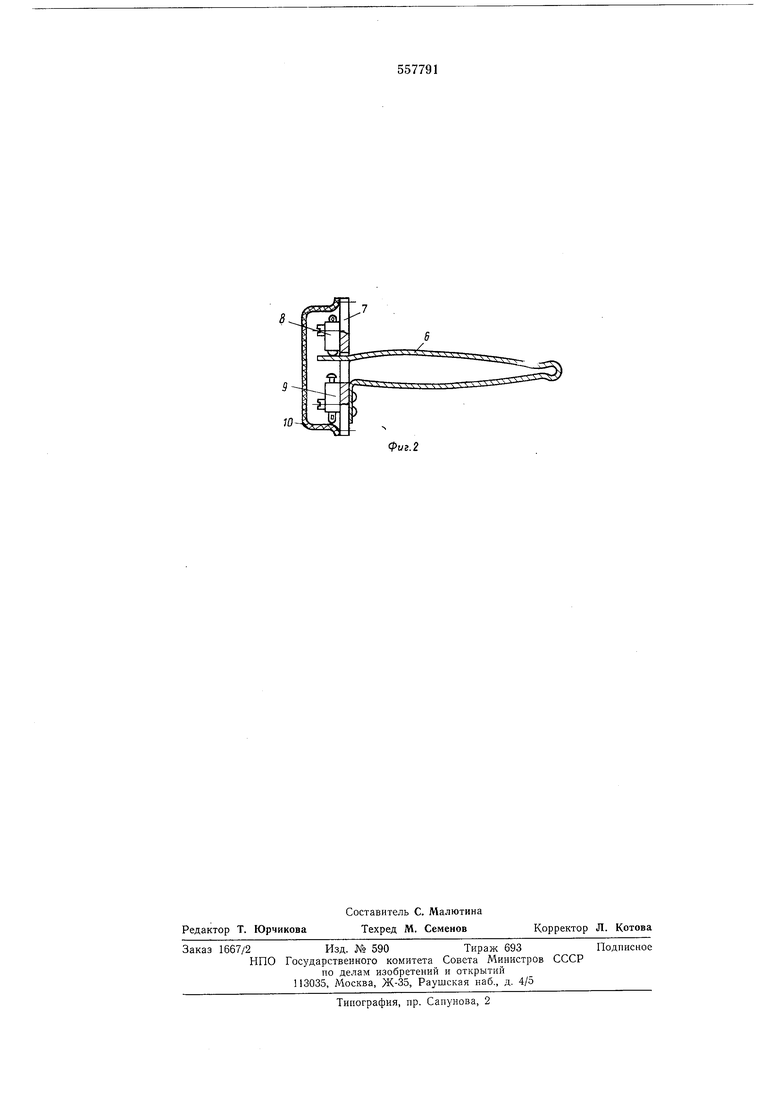
На фиг. 1 показано расположение датчика и протеза на инвалиде; на фиг. 2 изображен датчик.
Датчик 1, погруженный в канал, электрически соединен с электронным блоком 2 управления, связанным с источником 3 питания и искусственной кистью 4 с электроприводом. Блок управления и искусственная кисть закреплены на протезе 5, датчик не имеет 5 жесткого соединения с протезом.
Датчик содержит пружинящий пинцет 6, закрепленный на плате 7, на которой расположены микропереключатели 8 и 9, закрытые крышкой 10.
0 В исходном положении кнопка микропереключателя 8 нажата свободным концом пружинящего пинцета 6.
Управляют протезом следующим образом. Пинцет погружают в образованный опера5 тпвным путем мышечный канал. При сужении канала свободный конец пинцета начинает перемещаться, при этом сначала отпускается кнопка микропереключателя 8, а затем нажимается кнопка микропереключателя 9. Спгнал с микропереключателей поступает на электронный блок 2 управления. Он реализует заданный алгоритм управления, например познционпо-скоростной, при котором быстрому сжатию пинцета до сра5 батывання микропереключателя 9 соответствует включение электропривода кисти на раскрытие, а медленному - на схват.
Использование предлагаемого способа управления протезом с внешнпм источником
о энергии приводит к исключению самопроизвольных срабатываний датчика при смещениях протеза относительно культи, получению возможности использования для управления ослабленных мышц культей конечностей.
Формула изобретения
Способ управления протезом с внешним источником питания с помош;ью датчика, отличающийся тем, что, с целью исключения ложных срабатываний протеза, а также возможности использования ослабленных мышц культей конечностей для управления протезом, создают оперативным путем мышечный канал, в который помещают датчик, например контактный, и соединяют датчик с электроприводом протеза.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 2678709, кл. 192-4-8,1954.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления многофункциональным протезом руки с внешним источником энергии | 1978 |
|
SU685286A1 |
| Протез предплечья на расщепленную культю | 1988 |
|
SU1563692A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОТЕЗОМ ПЛЕЧА | 1992 |
|
RU2063194C1 |
| Узел управления протезом верхней конечности | 1989 |
|
SU1664308A1 |
| Протез предплечья с биоэлектрическим управлением для детей | 1978 |
|
SU766594A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 1969 |
|
SU251139A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Протез верхней конечности | 1988 |
|
SU1627172A1 |
| Протез предплечья на расщепленную культю | 1988 |
|
SU1724209A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
(pjil
