йены для другого, а полости цилиндров в местах расположения пружин гидравлически связаны с задающим устройством.
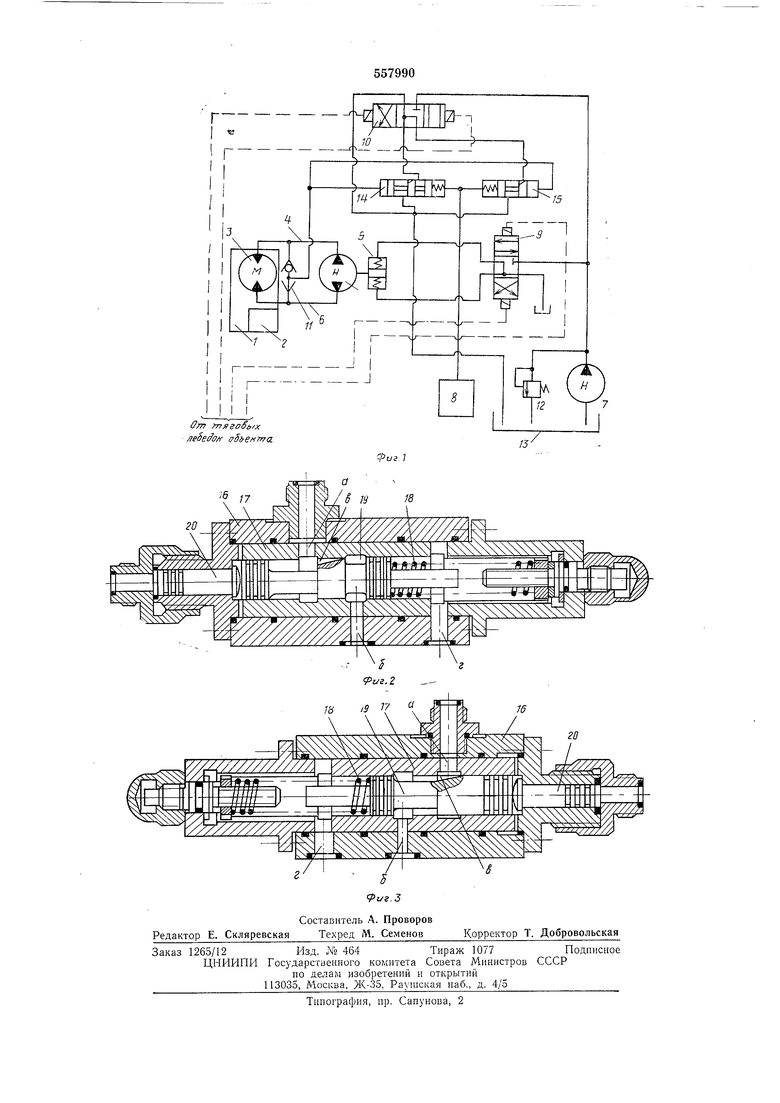
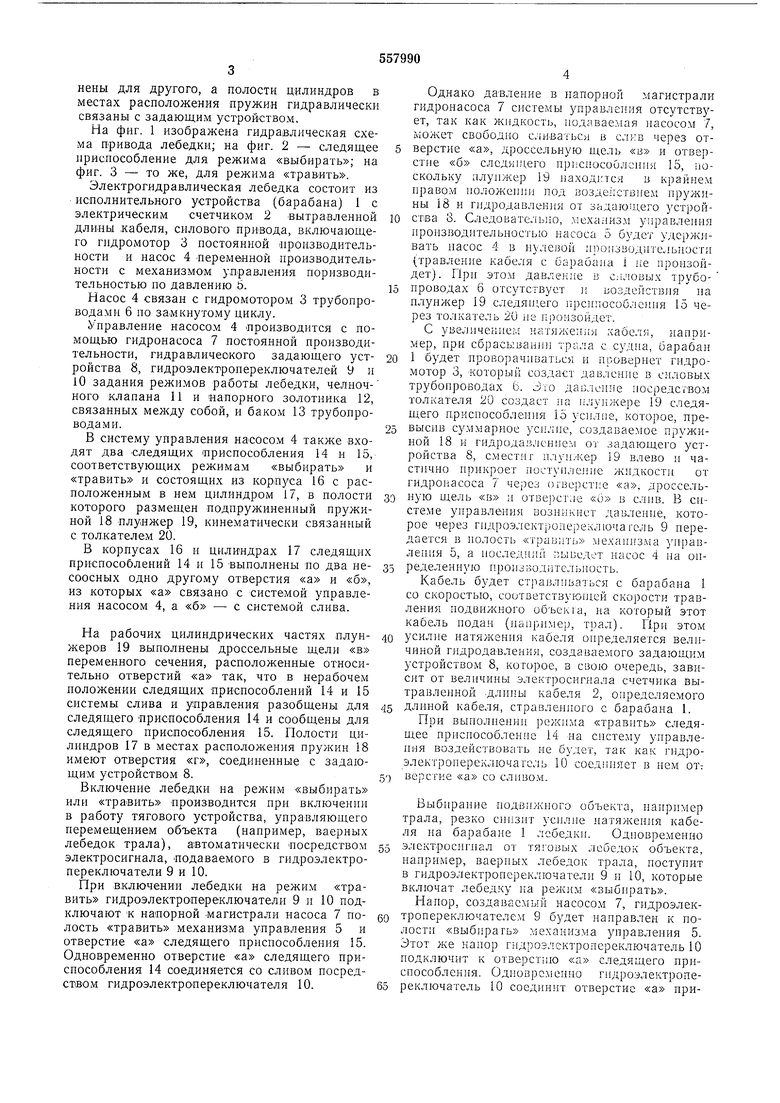
На фиг. 1 изображена гидравлическая схема привода лебедки; на фиг. 2 - следящее приспособление для режима «выбирать ; на фиг. 3 - то же, для режима «травить.
Электрогидравлическая лебедка состоит из исполнительного устройства (барабана) 1 с электрическим счетчиком 2 вытравленной длины .кабеля, силового привода, включающего гидромотор 3 постоянной афоизводительности и насос 4 леремеиной производительности с механизмом управления иоризводительностью по давлению 6.
Насос 4 связан с гидромотором 3 трубопроводами 6 по замкнутому циклу.
правление насосом 4 производится с помощью гидронасоса 7 постоянной производительности, гидравлического задающего устройства 8, гидроэлектропереключателей 9 и Ю задания режимов работы лебедки, челночного клапана 11 и напорного золотника 12, связанных между собой, и баком 13 трубопроводами.
В систему управления насосом 4 также входят два следящих «приспособления 14 и 15, соответствующих режимам «выбирать и «травить и состоящих из корпуса 16 с расположенным в нем цилиндром 17, в полости которого размещен подиружиненный пружиной 18 плунл ер 19, кинематически связанный с толкателем 20.
В корпусах 16 и цилиндрах 17 следящих приспособлений 14 и 15 выполнены по два несоосных одно другому отверстия «а и «б, из которых «а связано с системой управления насосом 4, а «б - с системой слива.
На рабочих цилиндрических частях плунжеров 19 выполнены дроссельные щели «в переменного сечения, расположенные относительно отверстий «а так, что в нерабочем положении следящих приспособлений 14 и 15 системы слива и управления разобщены для следящего приспособления 14 и сообщены для следящего приспособления 15. Нолости цилиндров 17 в местах расположения пружин 18 имеют отверстия «г, соединенные с задающим устройством 8.
Включение лебедки на режим «выбирать или «травить производится при включении в работу тягового устройства, управляющего перемещением объекта (например, ваерных лебедок трала), автоматически посредством электросигнала, подаваемого в гидроэлектропереключатели 9 и 10.
При включении лебедки на режим «травить гидроэлектропереключатели 9 и 10 подключают К напорной -магистрали насоса 7 полость «травить механизма управления 5 и отверстие «а следящего приспособления 15. Одновременно отверстие «а следящего приспособления 14 соединяется со сливом посредством гидроэлектропереключателя 10.
Однако давление в напорной магистрали гидронасоса 7 системы управления отсутствует, так как жидкость, подаваемая iiacocoM 7, может свободно сливаться в слив через отверстие «а, дроссельную щель «в и отверстие «б следящего приспосоолсиия 15, гюскольку алуижер 19 иаход1:тся в крайнем правом положепин под возде ютвлем пружины 18 и гидродавления от задающего устройства 8. Следовате., механизм уиравлеиия ироизводительиостыо иасоса 5 будет удерживать насос 4 в nyaeJJOii пропзводительгюсти (травление кабеля с барабана 1 не произойдет). При этом давлекгге з трубопроводах 6 отсутствует л воздействия на плунжер 19 следяи1,его прсипособлсиия 15 через толкатель 20 не 111)оизойдет.
С увеличеапем натяжения кабеля, например, при сбрасывании трала с судна, барабан 1 будет проворачиваться и провернет гидромотор 3, оторый создаст давление в силовых трубопроводах 6. Это даБлсиие посредством толкателя 20 создаст па 11лу 1жере 19 следящего приспособления 15 усилие, которое, превысив суммарное усилие, создаваемое пружиной 18 и гидродавленпем от задающего устройства 8, сместит плуи.Кер 19 влево и частично прикроет поступлеппе жидкости от гидронасоса 7 через огверстие «а, дроссельиую щель «в 1 отверст;1е «б в слив. В снстеме управления возникнет давление, которое через гндроэлсктро11е|)екл10чагсль 9 передается в полость «травить механизма Лнравления 5, а последний пывсдет насос 4 на определенную производительность.
Кабель будет стравливаться с барабана 1 со скоростью, соответствующей скорости травления подвижного объекта, на который этот кабель подан (напрпмер, трал). При этом усилие патяжения кабеля определяется величиной гидродавления, создаваемого задающим Зстройством 8, которое, в свою очередь, зависит от величины электроспгнала счетчика вытравленной .длины кабеля 2, определяемого длиной кабеля, стравлен 1ого с барабана 1.
При выполпеннп режима «травить следящее приспособление 14 на систему управления воздействовать не будет, так как гидроэлектропереключагсль 10 соединяет в нем отт верстие «а со слнвом.
Выбнрапие подвижного объекта, например трала, резко снизит усилие натяжения кабеля иа барабане 1 лсбедкн. Одновременно электроспгнал от тяговых лебедок объекта, например, ваерных лебедок трала, поступит в гидроэлектропереключателп 9 и 10, которые включат лебедку па режим «выбирать.
Напор, создаваемый насосом 7, гндроэлектропереключателем 9 будет направлен к полостп «выбирагь механизма управлеиия 5. Этот же напор гидроэлектропсреключатель 10 подключит к отверстию «а следящего приспособления. Одповрсмепно гпдроэлектропереключатсль 10 соединит отверстие «а приспособления 15 со сливом и выключит его из работы.
Давление от задающего устройства 8 и пружина 18 удерживают плунжер 19 приспособления 14 в крайнем левом положении, в результате чего слив жидкости из системы управления через отверстия «а и «б будет перекрыт. В системе управления возникает давление, подводимое гндроэлектропереключателем 9 в полость «выбирать механизма управления 5, который выведет пасос 4 на определеииую производительность.
Начинается выбирание кабеля со скоростью, соответствующей скорости выбирания иодвижного объекта. При этом усилие натяжения кабеля увеличится, что в свою очередь вызовет повыщение давления в трубопроводах 6. Это повышение давления создаст усилие, которое посредством толкателя 20 переместит плунжер 19 вправо и произойдет частичный слив жидкости из системы управлення через отверстие «а, дроссельную щель «в и отверстие «б в бак 13 системы слива. Произойдет снижение давления в системе управления и механизм управления 5 выведет насос 4 «а меиьииую производительность. Натяжение кабеля умеиьщится и при дальнейшем выбирании будет автоматически изменяться по определенному закону, зависящему от величины давления от задаюохего устройства 8, подводимого в отверстие «г приспособления 14. Величина этого давления зависит от величины электросигнала счетчика вытравленной длины кабеля 2, определяемого длиной кабеля, стравленного с барабана 1.
Формула изобретения
Электрогидравлическая лебедка, содержащая барабан, приводимый во вращение гидромотором, связанным системой трубопроводов по замкнутому циклу с насосом переменной производительности и с выполненным в виде пилиндра, расположенного в корпусе и содержащего подвижный плунжер, взаимодействующий с толкателем, следящим приспособленнем, воздействующим на насос в зависимости от усилия натяжения тягового органа, например кабеля, о т л и ч а ю nui и с я тем,
что, с целью повыщения точпостп поддержания необходимой скорости выбирания и травления кабеля, лебедка снабжена счетчиком вытравленной длины кабеля и электрически связаиным с ним задающим устройством,
при этом па лебедке устаиовлеио дополнительное следящее приспособление, а в корпусах и цилиндрах обоих следящих приспособлений выполнено по два иесооспых одно другому отверстия, одно пз которых связано с
системой управления насосом, а другое - с системой слива, иричем па рабочих цилиндрических частях плунжеров выполнены дроссельные щели переменного сечения, расиоложенные так, что системы слива и управления
разобщены для одного из следящнх приспособлений и соединены для другого, а полости цил 1ндров в местах расположення пружин гидравлически связаны с задающим устройством.
Источники ннформации, принятые во внимание ири экспертизе:
1.Дубровский О. Н. и др. «Гидравлические приводы судовых механизмов. Судостроение,
Л., 1969, с. 305.
2.Авторское свидетельство СССР N° 154786, М. Кл.2 В 63В 21/16, 14.05.1962 (прототип).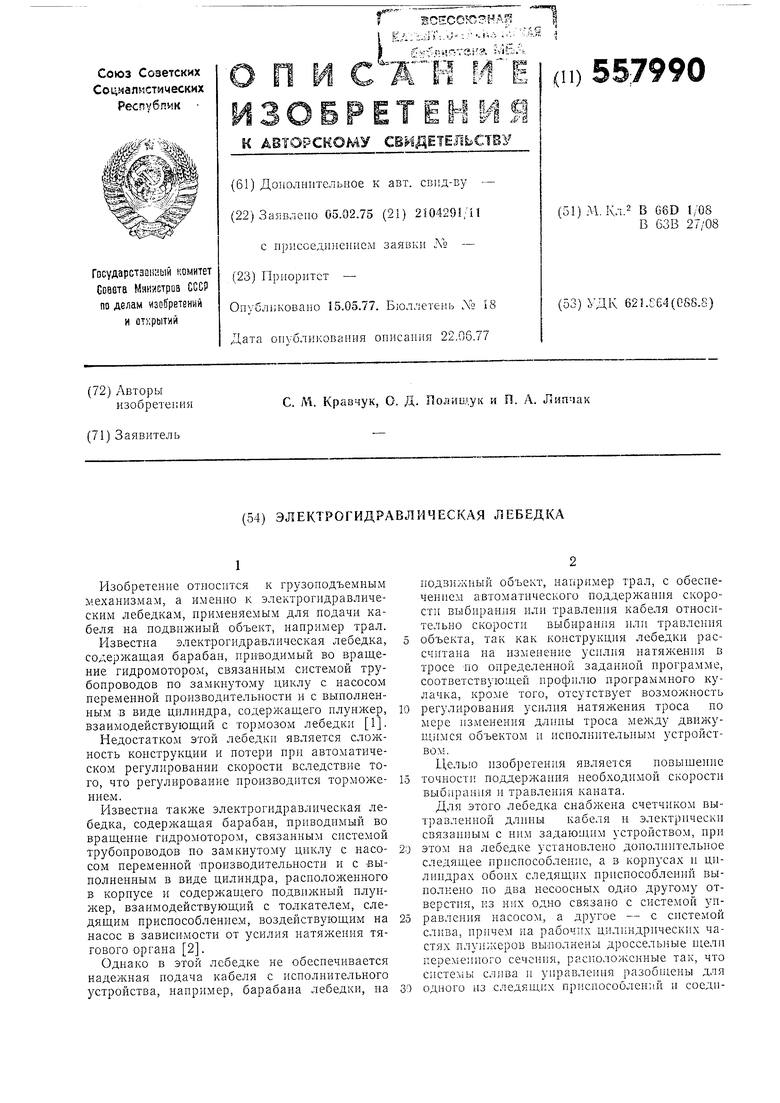
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556041C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Судовое грузовое устройство для безударной передачи груза в море | 1985 |
|
SU1255508A1 |
| Устройство для спуска и подъема шлюпок и катеров | 1972 |
|
SU513901A1 |
| ГИДРОСИСТЕМА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА ВОДОЛАЗНОГО КОЛОКОЛА | 2009 |
|
RU2403170C1 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| Спуско-подъемное устройство | 2018 |
|
RU2735444C2 |
| Устройство для спуска и подъема трала | 1982 |
|
SU1074467A1 |
| Устройство для автоматического регулирования натяжения троса электрической лебедки | 1935 |
|
SU48710A1 |