2. Устройство по f. 1., отличающееся тем, что механизм аварийного останова груза выполнен в виде гидравличес1 ого /юза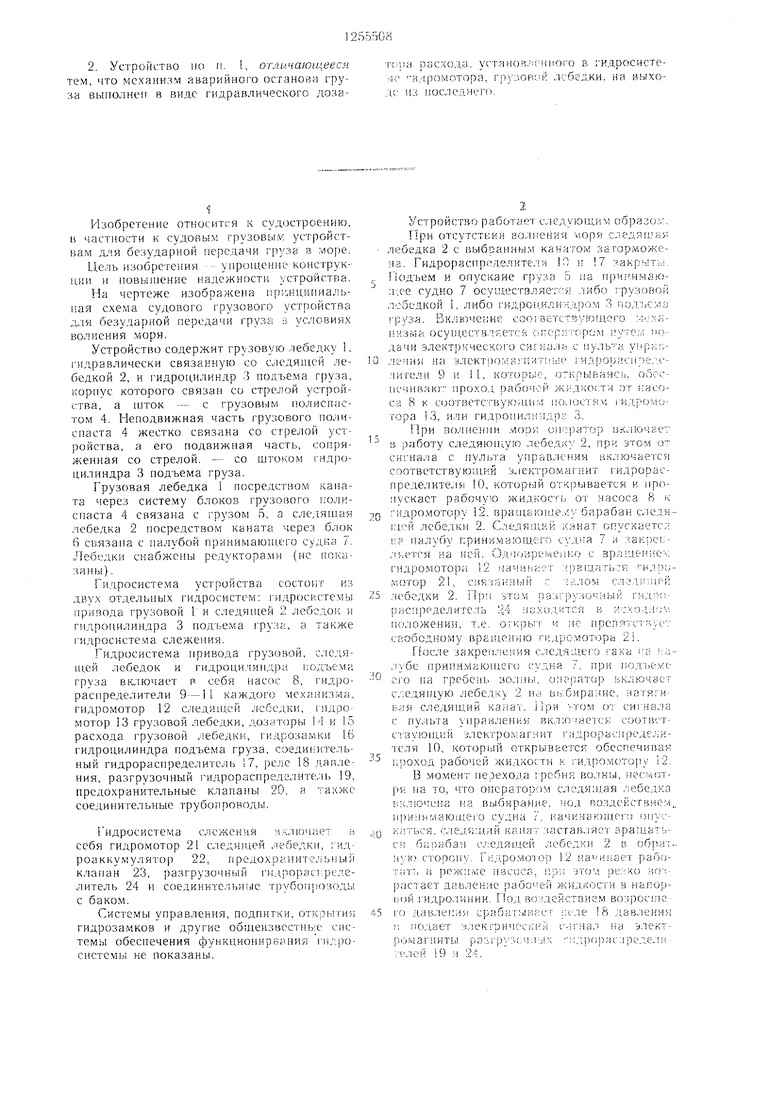

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Гидропривод грузовой лебедки стрелового самоходного крана | 1979 |
|
SU867852A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| Судовое грузовое устройство для безударной передачи грузов | 1980 |
|
SU933541A1 |
| Гидропривод грузовой лебедки стрелового крана | 1984 |
|
SU1294760A1 |
| Судовое грузовое устройство для безударной передачи грузов | 1981 |
|
SU979201A2 |
| КРАНОВОЕ СУДНО | 1992 |
|
RU2043291C1 |

Изобретение относится к судостроению, в частности к судовым грузовым устройствам для безударной передачи груза з мо)е. Цель изобретения - упрощение конструкции и иовы)нение надежности устройства. На чертеже изображена .-;нциг1иаль- пая схема судового грузового устройства для безударной передачи груза в условиях волнения моря.
Устройство содержит грузовую .лебедку 1, гидравлически связанную со следящей лебедкой 2, и гидроцилиндр 3 подъема груза, корпус которого связан со стрелой устройства, а шток - с грузовым ..писнас- том 4. Неподвижная часть грузового полиспаста 4 жестко связана со стрелой устройства, а его подвижная часть, сопряженная со стрелой. - со HJTOKOM гидроцилиндра 3 подъема груза.
Грузовая лебедка 1 носредстиом каната через систему блоков грузового г;оли- сиаста 4 связана с грузом Б, а следящая лебедка 2 иосре.дством каната через блок 6 связагш с палубой принимаюн1его судка 7. Лебедки снабжены редуктора.ми (не иока- 3 а п ы}.
Гидросистема устройства состоит из двух отдельных гидросистем; гидросистемь1 привода грузовой 1 и следящей 2 лебедок и гидропилиндра 3 под15ема груза, а также гидросистема сле.жения.
Гидросистема привода грузо 5ОЙ, следящей лебедок и гидроцилиндра подъема груза в,ч.лючает в себя насос 8, гидро- расиределители 9-ii каждого механизгла, гидромотор 12 следиидсй лебедки, гидромотор 13 грузовой лебедки, дозаторы 14 и 15 раехода грузовой лебедки, гидрозамки 16 гидроцилиндра иодъема груза, соедин:итель- ный гидрорасиределитель 17, реле 18 дав.те- ния, разгрузочный гидрорасиредцлите.:|ь 19, предохранительные кланан.ы 20, а также соедиь1итель} ые трубопроводы.
Гидросистема слежения нключает еебя гидромотор 21 следяндей лебедки, г роаккумулятор 22, нредохраните;; клапан 23, разгрузочный гидрорас фе литель 24 и соединительные T|jy6oiij)03c с баком.
Сиетемы управления, подпитки, откры- гидрозамков и другие обшензвестпые с темы обеснечения функционирвания гид системы не показаны.
Устройство работает слел.ующим об 1азо ,.
При ОТСУТСТВИИ йо;1:-1ения юря следяи ия
лебедка 2 с выбсанны.м канатом загорможена. Гидрорасиределители 10 и 17 закрыт;;.
Г1с1дъем и опускаие г)уза 5 иа принимающее судно 7 осуществляете: ; либо грузовой лебедкой I. либо гидро 1ил1-1ндром 3 Г1ол;ьсма руза. Вклнэчеиие cooi-ветствующего м-хй- низма осу1(1,ествлЕетсп с;пера орс;м нутем ио- дачи электрического сигнала с у фк ;ления на э;1ектромагпит; ые гидрО ас: е/.е- лителн 9 и 1, котооые, о гкпываяс ;, исчивяк) проход рабочей жидкости DT i;aco- са 8 к cijOTBCTCTByK nuK r 0лостял ; ги.:,р ;;ми- тора 13, или гидроиилм; д. 3.
ри Езо.миенпи мози оир1)атор включвет
Li работу следяюп,ую лебедку 2, при этом о с пул)та уирав;1ения включается соответствующий электромаг нит гидрораспределителя 10, который открывается и npcv , ivcKacT рабочую жилкость от насоса 8 к
гидромотору 12. вра1цаю1це.:у барабан следя- ПС й лебедки 2. С;|едя икк каиат опускаетсл и иалубу прин;-;маюш,егп судна 7 л .aKjJCi;- , 1ке )тя на ней. Oдfl JBpeмeiИ-;o с spa;ден;№-.; идромотора 12 ачииает :-р31пать:я илр;;лебедки 2. При том разгрузочный гидгм;- рас ррделитсль 4 :1;:;хо.. 1,ится в Hcxo.bios: и();1оженки. т.е. открыт ч ие препятстзусг свободному враигеиию гидрсмотора 2;.
После закрепления следящего ака й :а- ирипимаюихгго л при пол. ьел е ci o на гребень золны, оператор ж;;ючаст следящую лебедку 2 на вь;бираиие, натяги- БУи следяплий каиат. При -том от си1 на:1а с пульта уиравлепин включается COOIBCT- с -в ЮИлий электромагнит ;-iД)lpacиf)eдeJiи- тсля 10, KOTOpiiH откр1 1вается обеспечивая кроход рабочей жидкости к i-идромотору 12.
В момент пе:3ехо.а.а гребня во.тны, несмотря па то, что оператором следящая лебе/хка включена на выбираьн-1е, иод воздействием,, ирин1- маю це 0 судна 7, начинагон. опускаться. следя/НИИ JcanaT заставляет зрапдать- ся бапабан с, :сдятей ; ебедки 2 в обрат.- ную CTOpoiiV. Г1:дромо 1 op 12 -ачииает работать ti режиме насиср. i;p;i je: :xo ;-;о -:- растаст давление рабо - ей жидкос ш в напорной -идролинии. Под воздействием BOJipocinc го /иавлеиия срабатыкас ;н-ле 18 давления и подает члекгричс скг й c--;i ia, i на элект- pONiarHHTb рэзгр :н:,ч;Г:: :-:;дрг;расл ре.телз гелей 19 ч 24.
При этом ги-дрораспределитель 24 закрывается, перекрывая проход через него рабочей жидкости, а гидрораспределитель 19 открывается, обеспечивая свободный проход рабочей жидкости от разгрузочных полостей предохранительных клапанов 20, которые разгружаются, обеспечивая свободный проход через них рабочей жидкости от гидромотора 12, т.е. обеспечивая свободное вращение последнего, а гидромотор 21 начинает работать в режиме насоса, нагнетая рабочую жидкость в гидроаккумулятор 22. Од- .човременно от электросигнала реле 18 давления выключается гидрораспределитель 10 и разгружается насос 8, при этом гидрораспределитель 10 занимает исходное положение, разобщая гидромотор 12 и насос 8.
Дальнейшая работа следящей лебедки 2 происходит автоматически, без участия оператора.
В момент перехода впадины волны принимающее судно 7 начинает подниматься, появляющуюся слабину в следящем канате выбирает барабан следящей лебедки 2, который вращается от гидромотора 21, питаемого гидроаккумулятором 22. Следящая лебедка 2 настроена и работает в режиме слежения. Указанные циклы повторяются авто- .матически весь период работы грузового устройства в режиме слежения.
При необходимости ориентирования груза 5 10 высоте относительно нока стрелы устройства и палубы принимающего судна 7, для обеспечения свободного подъема-опускания груза синхронно с палубой принимающего судна, оператор включает в работу грузовую лебедку 1, гидромотор 13 которой через включенный с пульта управления гидрораспределитель 9 получает питание от насоса 8.
Грузовая лебедка 1 подготовлена к работе в режиме слежения. Исходное положение гидрораспределителей в режиме слежения: гидрораспределители 9, 10, 11, 17 и 24 закрыты, гидрораспределитель 19 открыт.
Операторо.м с пульта управления подается сигнал на электромагнит гидрораспределителя )7, который включается и соединяет полости гидромоторов 12 и 13 следя- плей и грузовой лебедок между собой, одновременно с пульта управления выключают гидрораспределитель 19, прекращая разгрузку предохранительных клапанов 20, т.е. прекращая свободный перелив через пих рабочей жидкости.-Барабан следящей лебедки 2
продолжает вращаться синхронно с под1)е мом-опусканием палубы принимающего судна 7. Гидромотор 12 следящей лебедки 2, получая вращение от барабана лебедки и работая в режиме насоса, через открытый гидрораспределитель 17 вращает гидромотор 13 грузовой лебедки 1, заставляя синхронно вращаться барабаны грузовой и следящей лебедок. При этом груз 5 персме щается по вертикали син.хронно с палубо -;
0 принимающего судна 7. Для обеспечен1 я одинаковой скорости перемещения грузового и следящего канатов соответственно подбирают диаметры барабанов лебедок, передаточные отнощения редукторов и кратность полиспаста.
Безударное опускание груза 5 па палуо принимающего судна 7 осуществляется с помощью гидроцилиндра 3 подъема груза. Оператор с пульта управления включает гидрораспределитель 11 и одновременно из
Q системы управления (не показана) подается рабочая жидкость на открытие гидрозахь ков 16.
Рабочая жидкость от насоса 8 через открытые гидрораспределитель 11 и гидрозамки 16 поступает в порщневую полость гнд5 роцилиндра 3 и происходит опускаие груза на палубу с заданной оператором скоростью. Падение груза при обрыве трубопроводов привода гидроцилиндра 3 подъема груза предотвращается гидрозамкамн 16, которые автоматически закрываются от n;i дения давления, вызванного обрывом трубопроводов. Падение 1 руза при обрыве трубопроводов привода грузовой лебедки 1 предотвращается дозаторами расхода 5, которые автоматически закрываются в результате увеличения скорости потока через них рабочей
жидкости, возникающего нри обрыве трубопроводов.
Для предотвращения аварийной спту; - ции при обрыве следящего каната (нри этом груз поднимается вверх, так как бара0 баны следящей и грузовой лебедок работают на выбирание под воздействием гид- роаккумулятора 22) служит устройство аварийного останова лебедок, выполненное в в де дозаторов 14 расхода. При обрыве следящего каната резко возрастает скорость
5 потока рабоче жидкости, проходящей через дозаторы 14 расхода, которые вследствие этого автоматически закрываются и грузо вая и следян1.ая лебедки гидравлически затормаживаются.
| Аппарат для сульфитации пюре, дробленых плодов и тому подобных продуктов | 1950 |
|
SU93354A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
