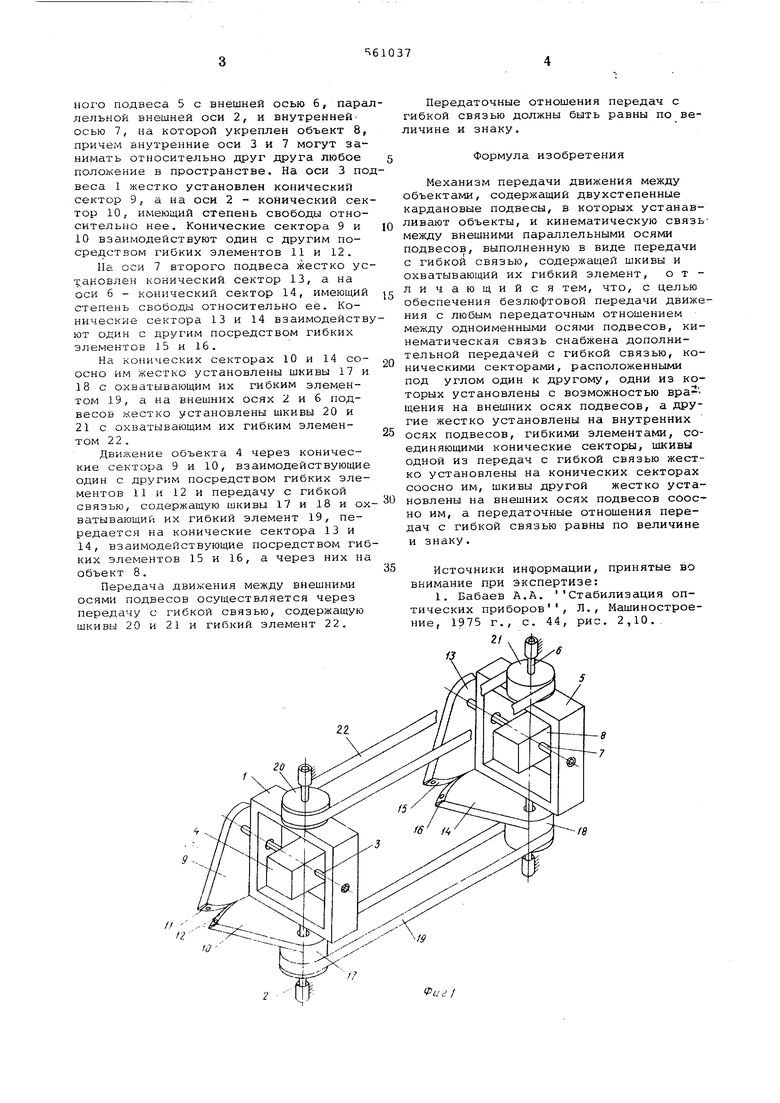
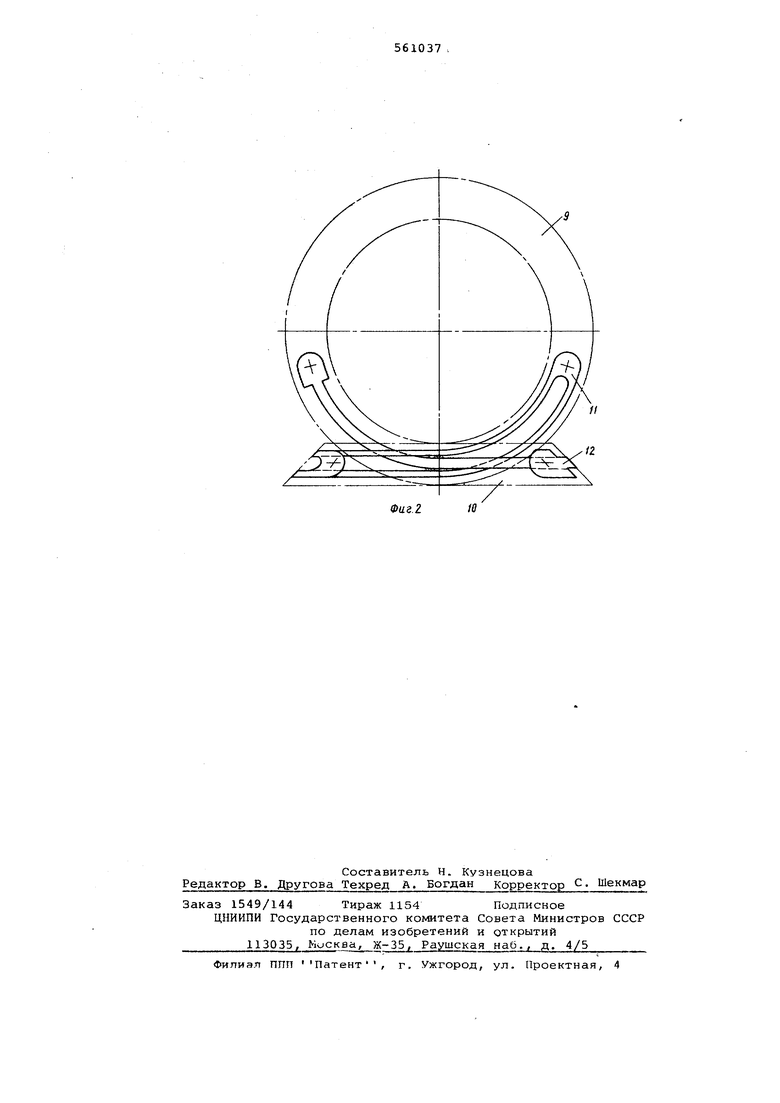
Изобретение относится к приборостр ению и предназначено для передачи органических угловых перемещений и моментов между объектами, установленныlym в двухстепенных кардановых йодвесках. Известен механизм передачи движения между объектами, содержащий двухстепенные кардановые подвесы с установленными в них объектами и кинемаг тическую связь между одноименными ося ми подвесов, выполненную в виде парал лелограмма с пространственными шарнирами l . Наиболее близким решением из известных является механизм передачи движения между объектами, содержащие, двухстепенные кардановые подвесы, в которых устанавливают объекты, и кинематическую связь между внешними параллельными осями подвесов, выполненную в виде передачи с гибкой связью, содержащей шкивы и охватывающий их гибкий элемент. Недостатками указанных механизмов являются невозможность обеспечения безлюфтовой передачи движения с любым передаточным отношением между одноименными осями подвесов. Цель изоооетениг - обеспечение безлюфтовой передачи дзижения с любым п редаточным отношением между Годноименными осями подвесов. Указанная цель достигается тем, что кинематическая связь снабжена дополнительной передачей с гибкой связью, коническими секторами, расположенными под углом один к другому, одни из которых установлены с возможностью вращения на внешних осях подвесов, а другие - жестко установлены на внутренних осях подвесов, гибкими элементами, соединяющими крнические сектора, шкивы одной из передач с гибкой связью жестко установлены на конических секторах tioocHO им, шкивы другой - жестко установлены на внешних реях подвесов соосно им, а : передаточные .отношения.передач с гибкой связью равны по величине и знаку. На фиг. 1 изображена схема механизма передачи движения между объектами; на фиг. 2 - схема взаимодействия конических секторов посредством гибких элементов. Механизм состоит из двухстепенного KajjflaHOBoro подвеса 1 с внешней осью 2 и внутренней осью 3, на которой укреплен объект 4, и двухстепенного карданiioro подвеса 5 с внешней осью 6, пара лельной внешней оси 2, и внутренней осью 7, на которой укреплен объект 8, причем внутренние оси 3 и 7 могут занимать относительно друг друга любое положение в пространстве. На оси 3 по веса 1 жестко установлен конический сектор 9, а на оси 2 - конический сек тор 10, имеющий степень свободы относительно нее. Конические сектора 9 и 10 взаимодействуют один с другим посредством гибких элементов 11 и 12. 1а оси 7 второго подвеса жестко ус 1;ановлен конический сектор 13, а на оси б - конический сектор 14, имеющий степень свободы относительно её. Конические сектора 13 и 14 взаимодейств ют один с другим посредством гибких элементов 15 и 16. На конических секторах 10 и 14 соосно им жестко установлены шкивы 17 и 18с охватывающим их гибким элементом 19, а на внешних осях 2 и 6 подвесов кестко установлены шкивы 20 и 21 с охватывающим их гибким элементом 22 . Движение объекта 4 через конические сектора 9 и 10, взаимодействующие один с другим посредством гибких элементов 11 и 12 и передачу с гибкой связью, содержащую шкивы 17 и 18 и ох ватывающий их гибкий элемент 19, передается на конические сектора 13 и 14, взаимодействующие посредством гиб ких элементов 15 и 16, а через них на объект 8. Передача движения между внешними осями подвесов осуществляется через передачу с гибкой связью, содержащую шкивы 20 и 21 и гибкий элемент 22. Передаточные отношения передач с гибкой связью должны быть равны по величине и знаку. Формула изобретения Механизм передачи движения между объектами, содержащий двухстепенные кардановые подвесы, в которых устанавливают объекты, и кинематическую связь между внешними параллельными осями подвесов, выполненную в виде передачи с гибкой связью, содержащей шкивы и охватывающий их гибкий элемент, отличающийся тем, что, с целью обеспечения безлюфтовой передачи движения с любым передаточным отношением между одноименными осями подвесов, кинематическая связь снабжена дополнительной передачей с гибкой связью, коническими секторами, расположенными под углом один к другому, одни из которых установлены с возможностью вра щения на внешних осях подвесов, а другие жестко установлены на внутренних осях подвесов, гибкими элементами, соединяющими конические секторы, шкивы одной из передач с гибкой связью жестко установлены на конических секторах соосно им, шкивы другой жестко установлены на внешних осях подвесов соосно им, а передаточные отношения передач с гибкой связью равны по величине и знаку. Источники информации, принятые во внимание при экспертизе; 1. Бабаев А.А. Стабилизация оптических приборов . Л., Машиностроение, 1975 г., с. 44, рис. 2,10. 2/ f3
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм передачи движения между объектами | 1977 |
|
SU619740A1 |
| АНТЕННОЕ УСТРОЙСТВО | 2015 |
|
RU2592053C1 |
| ПРИВОД ПОВОРОТА РАМКИ КАРДАНОВА ПОДВЕСА ГИРОСТАБИЛИЗАТОРА | 1977 |
|
SU1839982A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПРИБОРОВ НА ВОЗДЕЙСТВИЕ СЛОЖНЫХ ПРОСТРАНСТВЕННЫХ НАГРУЗОК | 2014 |
|
RU2569407C1 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| СИЛОВОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 1971 |
|
SU1839791A1 |
| АНТЕННОЕ УСТРОЙСТВО С ЛИНЕЙНОЙ ПОЛЯРИЗАЦИЕЙ | 2005 |
|
RU2282287C1 |
| Шагающая опора транспортного средства | 1980 |
|
SU933533A1 |
| Опора шагающей машины | 1977 |
|
SU751701A1 |
| РЕКЛАМНО-ИНФОРМАЦИОННЫЙ СТЕНД | 2004 |
|
RU2267165C1 |
-V
Фиг. 2
