Предлагаемое устройство относится к электромеханическим исполнительным органам систем ориентации искусственных спутников Земли (ИСЗ) на основе спаренных гироскопов.
Известны устройства с двумя гироскопами и механической синхронизацией одноименных осей поворота двухстепенных подвесов, при этом по величине развиваемых по осям ИСЗ моментов, судят косвенным путем по аналитическим выражениям, используя информацию об углах и угловых скоростях поворота осей гироскопов относительно корпуса ИСЗ, (Джекот Лиска. Применение гиростабилизаторов в системах управления угловым положением космических аппаратов.- Вопросы ракетной техники, №2, 1967).
Основными недостатками таких устройств являются:
значительный вес и габариты, вследствие того, что кольца сложного подвеса охватывают гирокамеру;
информация по углам и угловым скоростям не позволяет непосредственно оценить величину момента, а вследствие того, что развиваемый устройством момент по какой-либо оси зависит от углов и угловых скоростей поворота по двум перекрестным осям, резко усложняется аппаратура для реализации необходимого алгоритма управления.
Кроме того, ряд технологических факторов (неперпендикулярность осей подвеса, неравенство кинетических моментов) и их изменение в процессе эксплуатации (люфт) остаются неучтенными.
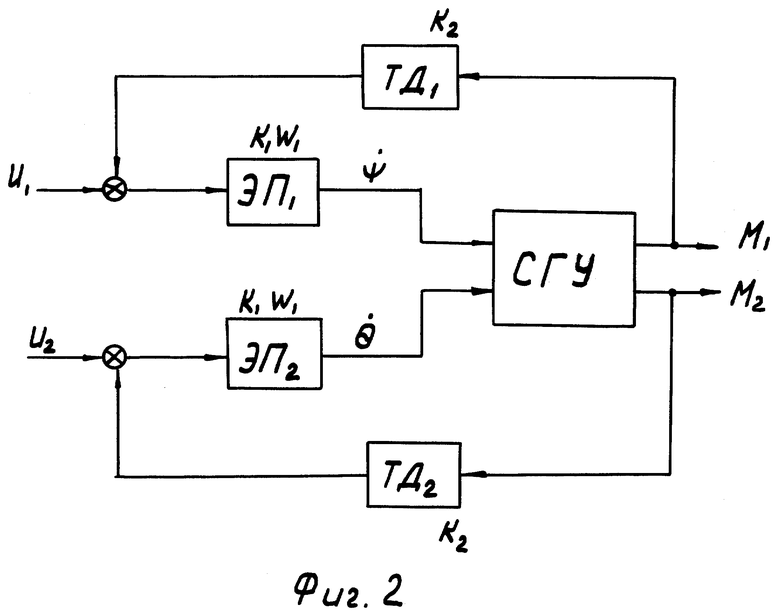
Предлагаемое устройство, схематически показанное на фиг.1, в известной мере свободно от указанных недостатков.
Роторы гироскопов 1 консольно закреплены на валах электродвигателей, корпусы которых являются внутренними кольцами подвесов 2 (бикарданов подвес по терминологии А.Ю.Ишлинского). Подвесы установлены в неподвижных опорах 3 и 4. Рычажные механизмы синхронизации по осям поворота 5 и 6 несут на своих кривошипах тензодатчики ТД1 и ТД2. Электроприводы ЭП1 и ЭП2 служат для поворота гироскопов вокруг осей 5 и 6.
Роторы гироскопов выполнены специальной "грибообразной" конфигурации, так что узел подвеса, неподвижные опоры, механизмы синхронизации и электроприводы поворота размещаются в пространстве под роторами. Конфигурация ротора выбирается так, чтобы обеспечить необходимый угол поворота. Указанное расположение роторов относительно других элементов устройства позволяет увеличить момент инерции ротора гироскопа и снизить размеры подвеса, благодаря чему снижается вес и габариты устройства в целом.
Работа устройства происходит следующим образом. При подаче управляющего сигнала на электропривод ЭП1 (ЭП2) происходит разворот главных осей гироскопов в соответствии с кинематикой подвесов фиг.1. Суммарные изменения величин проекций векторов кинетических моментов гироскопов по обеим осям во времени определяют величину и знак механических моментов, которые передаются на корпус ИСЗ. Нетрудно видеть, что эти моменты воспринимаются механизмами синхронизации по соответствующим осям, при этом кривошипы механизмов синхронизации подвергаются воздействию изгиба, что и регистрируется тензодатчиками ТД1 и ТД2.
Таким образом, моменты, передаваемые ИСЗ при развороте гироскопов, измеряются непосредственно, что позволяет технически простым средствами значительно уменьшить нелинейности и перекрестные связи устройства.
На фиг.2 приведен один из вариантов использования сигналов ТД1 и ТД2 в качестве отрицательной обратной связи, позволяющий снизить перекрестные связи каналов управления.
Здесь обозначены:
СГУ - силовое гироскопическое устройство с моментными характеристиками:
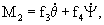
где f1; f2; f3; f4; - нелинейные функции углов поворота (ЭП1 и ЭП2);
U1 и U2 - управляющие сигналы по двум осям;
ЭП1 и ЭП2 - электроприводы поворотов с одинаковыми передаточными функциями K1W1;
ТД1 и ТД2 - тензодатчики с коэффициентами усиления К2;
 и
и  - угловые скорости разворота гироскопов по соответствующим осям подвеса;
- угловые скорости разворота гироскопов по соответствующим осям подвеса;
М1 и М2 - моменты управления по этим же осям.
Нетрудно видеть, что в этом случае при выполнении условия K1, K2W1 >> 1, выражения для моментов по осям 5 и 6 будут иметь вид:


что свидетельствует об автономности и линейности характеристик "момент-сигнал".
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКИХ АППАРАТОВ | 1973 |
|
SU1839792A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| ЭЛЕМЕНТ СИЛОВОГО ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА ДЛЯ СОЗДАНИЯ УПРАВЛЯЮЩЕГО МОМЕНТА НА БОРТУ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2007 |
|
RU2343419C1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА УГЛА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2114396C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Способ стабилизации гироскопической платформы | 2023 |
|
RU2826509C1 |
| СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРОВ | 2002 |
|
RU2249793C2 |
| СПОСОБ НАЧАЛЬНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2000 |
|
RU2180729C2 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| Установка для изучения режимов работы динамически настраиваемого гироскопа | 2024 |
|
RU2829671C1 |
Изобретение относится к электромеханическим исполнительным органам систем ориентации искусственных спутников Земли на основе спаренных гироскопов. Устройство содержит два гироскопа с кинематически связанными кардановыми подвесами, снабженными электроприводами поворота, при этом кардановы подвесы с электроприводами размещены внутри роторов гироскопов. Техническим результатом является уменьшение веса и габаритов. 2 ил.
Силовой гиростабилизатор, преимущественно для искусственных спутников Земли, содержащий два гироскопа с кинематически связанными кардановыми подвесами, снабженными электроприводами поворота, отличающийся тем, что, с целью уменьшения веса и габаритов, кардановы подвесы с электроприводами их поворота размещены внутри роторов гироскопов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Missiles and Rockets, 1963, v.13, № 11, рр.21-22.2 | |||
| Патент США № 3125886, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |

