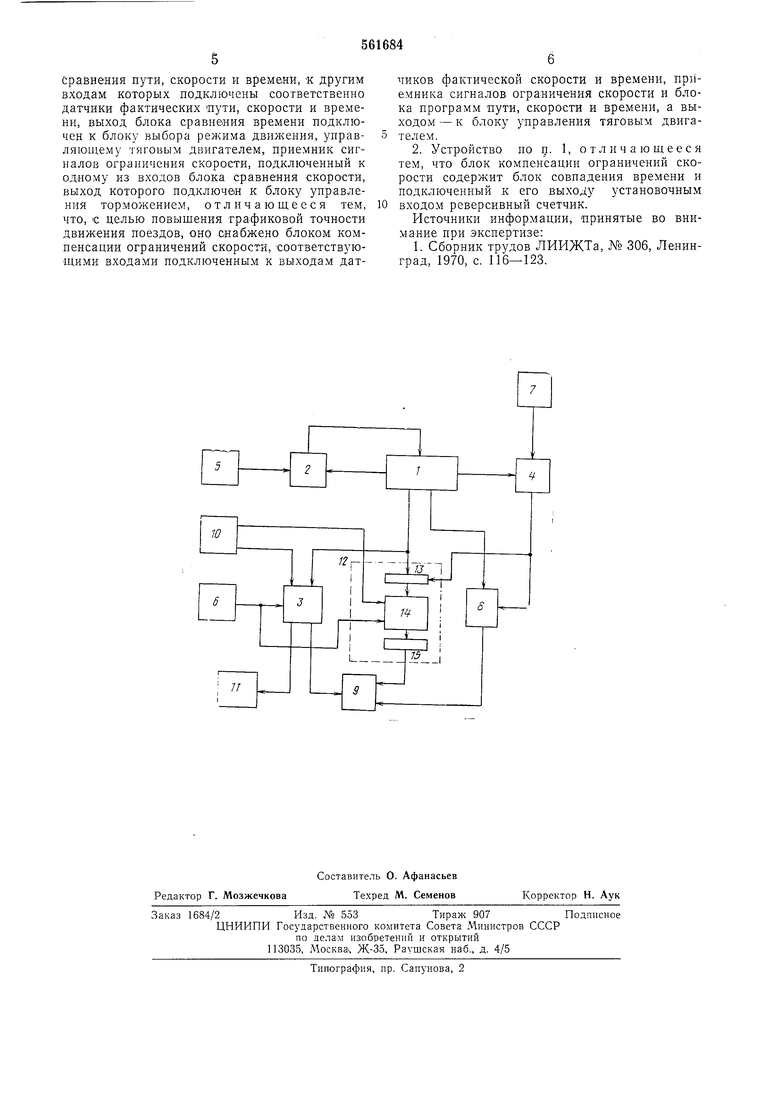
ния по скорости подключен к одному из входов блока 3 сравления скорости, соединенного с блоком И управления торможением, и блока 12 компенсации ограничений скорости. Блок 12 -соединен также с датчиком 6, блоком 1 программ пути, скорости и времени, блоком 4 сравнения времени и блоком 9 управления тяговым двигателем. Блок 12 компенсации ограничений скорости содержит блок 13 совпадения времени, выходом соединенный с установочным входом реверсивного счетчика 14. На выходе этого счетчика включен дискриминатор 15.
Устройство работает следующим образом.
Весь участок движения поезда разбивается на контрольные участки, для каждого из которых записывается в память системы автоведения длина контрольного участка, программное время хода по контрольному участку, допустимая скорость движения, три режима управления - для программного Nn, увеличенного Ni и уменьшенного NZ времени хода поезда. Программы режимов ведения поезда рассчитываются заранее как оптимальные с точки зрения потребляемой на тягу электроэнергии (топлива) для заданного времени хода.
В начале каждого контрольного участка длина его переписывается из блока 1 в блок 2, в котором производится ее сравнение с величиной пройденного с начала контрольного участка пути, измеряемого с помощью датчика 5. Как только разность этих двух величин становится равной нулю, на блок 1 программ выдается сигнал о переходе на следующий контрольный участок. В начале каждого контрольного участка в блоке 4 производится вычитание из величины программного времени хода поезда (поступающего из блока 1) величины текущего времени, поступающего из датчика 7. Вычисленная величина рассогласования времени поступает в блок 8, который выдает на блок 9 либо код режима ведения Nn (если величина рассогласования времени по модулю меньше зоны нечувствительности), либо код режима ведения (если величина рассогласования больше зоны нечувствительности), либо код режима ведения (если величина рассогласования отрицательна и по модулю больше зоны нечувствительности).
Блок 3 производит периодическое сравнение фактической скорости, определяемой датчиком 6, с величиной допустимой скорости, поступающей из блока 1 программ. Если окажется, что фактическая скорость поезда равна допустимой, то в блок 9 подается команда о переходе на выбег. В случае превышения допустимой скорости в блок 11 подается команда торможения.
Если движение поезда производится на сигнал автоматической локомотивной сигнализации (АЛС), ограничивающий скорость поезда, то из приемника 10 соответствующая величина ограничения скорости поступает в блок 3, в результате чего скорость поезда автоматически снижается до заданного сигналом АЛС уровня.
В случае прихода ограничивающего сигнала АЛС в блоке 12 производится запоминание фактической величины скорости иф до начала торможения. После прекращения действия ограничивающего сигнала АЛС в блоке 12 производится сравнение фактической скорости движения либо с этой запомненной величиной (если опоздание поезда не больше зоны нечувствительности по времени), либо с величиной допустимой скорости (если опоздание больше зоны нечувствительности). Если фактическая скорость меньше уровня запомненной (или допустимой) скорости на величину, превыщающую зону нечувствительности по скорости, то блок 12 выдает в блок 9 команду о переходе на максимальный тяговый режим. Если после прекращения действия сигнала АЛС разность между фактической скоростью и уровнем запомненной (или допустимой) скорости меньше зоны нечувствительности по скорости, то движение поезда производится на позиции, выбранной блоком 8.
Блок 11 на основании данных о превышении фактической скорости уровня допустимой скорости (или внеплановых ограничений) производит автоматическое управление тормозными средствами поезда. Блок 9 получает
команды о режиме ведения поезда из блоков 8, 3 и 12, причем наибольшее предпочтение принадлежит блоку 3, а наименьшее - блоку 8. Блок 9 производит автоматическое управление переключателями позиций локомотива
с контролем по току тяговых двигателей и условиям сцепления.
Блок 12 работает следующим образом. В начале действия внепланового ограничения скорости на шину сложения реверсивного
счетчика 14 из приемника 10 подается разрешающий сигнал и на нем записывается величина Уф, получаемая из датчика 6 в числоимпульсном виде. После окончания действия внепланового ограничения скорости разрешающий сигнал подается на вычитающую шину реверсивного счетчика и на нем вычисляется разность между запомненной и фактической скоростью. Если эта разность больше зоны нечувствительности (по скорости) дискриминатора 15, последний подает в блок 9 сигнал о переходе на максимальный тяговый режим. В случае, когда опоздание поезда больше зоны нечувствительности (по времени), то через блок 13 на счетчик 14 записывается из блока 1 величина допустимой скорости и по окончании действия внеплановых ограничений скорости фактически скорость сравнивается не с величиной Уф, а с допустимой скоростью.
Формула изобретения
1. Устройство для управления движением поезда, содержащее блок программ пути, скорости и времени, соответствующие выходы которого подключены к одним из входов блоков
Сравнения пути, скорости и времени, к другим входам которых подключены соответственно датчики фактических пути, скорости и времени, выход блока сравнения времени подключен к блоку выбора режима движения, управляющему тяговым двигателем, приемник сигналов ограничения скорости, подключенный к одному из входов блока сравнения скорости, выход которого НОДКЛЮЧ6Н к блоку управления торможением, отличающееся тем, что, с целью повышения графиковой точности движения поездов, оно снабжено блоком компенсации ограничений скорости, соответствующими входами подключенным к выходам датчиков фактической скорости и времени, приемника сигналов ограничения скорости и блока программ пути, скорости и времени, а выходом- к блоку управления тяговым двигателем.
2. Устройство по ц. 1, отличающееся тем, что блок компенсации ограничений скорости содержит блок совпадения времени и подключенный к его выходу установочным входом реверсивный счетчик.
Источники информации, принятые во внимание при экспертизе:
1. Сборник трудов ЛИИЖТа, № 306, Ленинград, 1970, с. 116-123.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением поезда | 1977 |
|
SU783070A1 |
| ТРЕХПРОГРАММНОЕ ДИСКРЕТНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 1972 |
|
SU330992A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| Устройство автоматизированного централизованного управления движением транспортного средства (ТС) городской рельсовой транспортной системы (ГРТС) | 2024 |
|
RU2839020C1 |
| СПОСОБ ОРГАНИЗАЦИИ ВИЗУАЛЬНОЙ СПРАВОЧНО-ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ МАШИНИСТА ПОЕЗДА | 2010 |
|
RU2494905C2 |
| Устройство для управления движением поездов метрополитена | 1979 |
|
SU918154A1 |
| ТРЕНАЖЕР ДЛЯ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ МАШИНИСТОВ ЛОКОМОТИВОВ И ОБСЛУЖИВАЮЩЕГО ПЕРСОНАЛА | 2015 |
|
RU2596042C1 |
| Единая цифровая бортовая платформа безопасности (БСБ-Е) | 2021 |
|
RU2768688C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ЛОКОМОТИВЕ ДЛЯ КОНТРОЛЯ ЗА ДВИЖЕНИЕМ ПОЕЗДА | 2019 |
|
RU2723513C1 |
