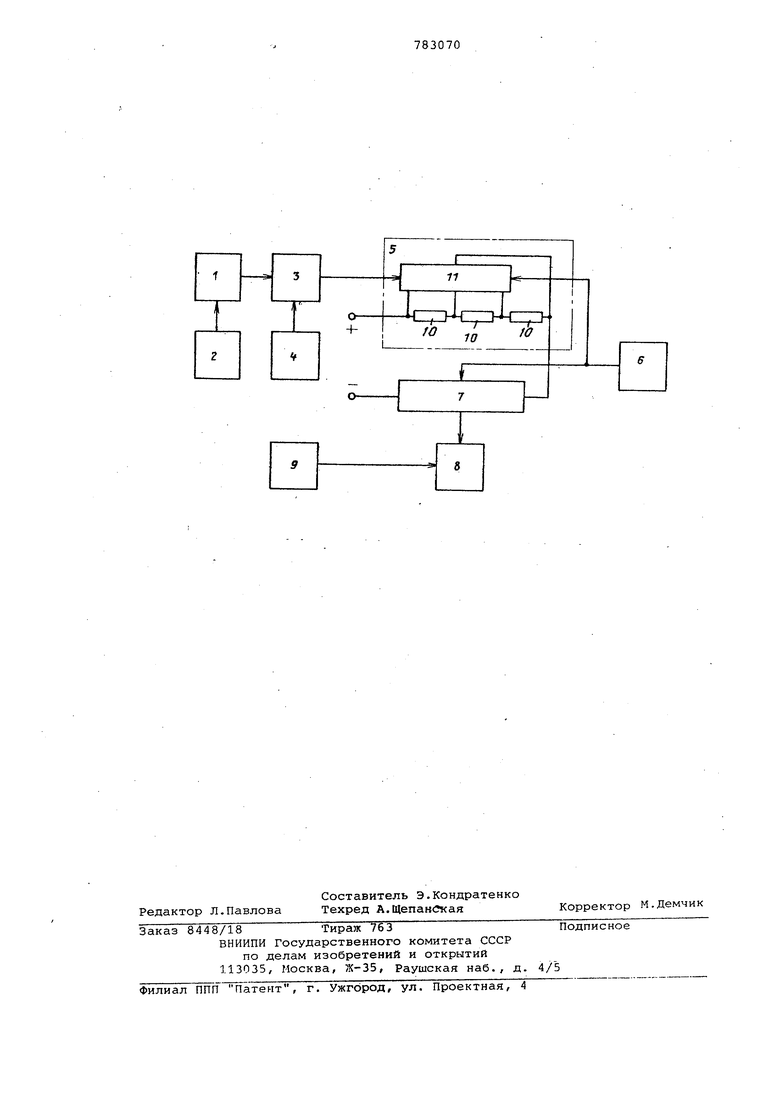
Изобретение предназначено для автоматизации ведения поезда и может быть использовано на магистральных линиях железнодорожного транспорта. Известны устройства для управления движением поезда, содер; ащие датчик пути, соединенный с входом блока программ, подключенного выходом к одному входу блока сравнения времени, другой вход Kotoporo соединен с датчиком времени, а выход с входом блока коррекции скорости, преобразователь допустимой скорости вход которого подключен к приемнику линейных сигналов, а выход - к одному вхо;ду регулятора скорости. Недостатком этого устройства является его сложность, обусловленная тем, что блок коррекции скорости выполнен в виде суммирующей схемы. Следствием высокой сложности устройства является его низкая надежность Кроме того, недостатком этого устрой ства является низкая точность выполнения времени хода поезда. Целью изобретения является повыше ние надежности, упрощение и увеличение точности устройства. Цель достигается тем, что блок ко рекции скорости включен в цепь питания преобразователя допу :тимой скорости и выполнен в виде элемента с управляемой проводимостью, управляющий вход которого подключен к приемнику линейных сигналов. Кроме того, элемент с управляемой проводимостью выполнен в виде KONMyтатора и подключенного к его шинам секционированного реостата. На чертеже представлена блок-схема устройства для управления движением поезда. Устройство для управления движением поезда содержит блок 1 программ, подключенные к нему датчмк 2 пути и блок 3 сравнения времени, с которым соединен датчик 4 времени, блок 5 коррекции скорости, соединенный с блоком 3, с приемником б линейных сигналов и преобразователем 7 допустимой скорости, к которому подключен регулятор 8 скорости, соединенный с датчиком 9 скорости, причем блок 5 коррекции скорости представляет собой элемент с управляемой проводимостью, который может быть выполнен в виде секционированного реостата 10 с коммутатором 11. Устройство работает следующим образом.
На выходе блока 1 программ формируется величина программного времени хода ггоезда, которое зависит от пройденного поездом пути, измеренного с помощью датчика 2 пути. В блоке .3 сравнения времени фактическое время хода, измеренное с помощью датчика 4 времени, сравнивается с программным. Таким образом, в блоке 3 вычисляется величина разности между фактическим и программным временем хода поезда , которая подается на один вХод блока 5 коррекции скорости, на другой вход которого подается информация об ограничениях скорости, получаемая от приемника б линейных сигналов .
Преобразователь 7 допустимой скорости формирует напряжение на выходе так, чтобы оно было пропорционально допустимой скорости движения Vg , соответствующей принятым приемником 6 линейных сигналов кодам. Блок 5 коррекции скорости выполнен в виде элемента с управляемой проводимостью и включен в цепь питания преобразователя 7 допустимой скорости. Очевидно что при этом выходное напряжение преобразователя 7 также зависит от сопротивления (прово.цимости) блока 5, которое в свою очередь является функцией разности Ai: , определяемой блоком 3 .
Напряжение с выхода преобразователя 7 в регуляторе 8 скорости сравнивается с напряжением, пропорциональным фактической скорости движения, измеряемой датчиком 9 скорости. На основании анализа полученной разности регулятор 8 скорости производит управление тягой и торможением поезда, обеспечивая выполнение уровня скорости, задаваемого напряжением с выхода преобразователя 7. Преобразователь 7 настраивается так, чтобы при сопротивлении блока 5, равном нулю, напряжение на его выходе соответствовало максимально допустимой скорости (в зависимости от сигнала, поступающего из приемника б). Поэтом сигнал, снимаемый с выхода преобразователя 7 не превышает допустимой скорости движения при любой величине сопротивления блока 5. При выполнении программы времени хода поезда (когда отклонение фактического времени хода с точностью до чувствительности блока 3 равно нулю) сопротивление блока 5 принимает некоторое номинальное значение. При этом требуемая скорост поезда, задаваемая преобразователем 7 регулятору 8, несколько ниже максимально допустимой. При опережении программы времени хода поезда величина сопротивления блока 5 увеличивается, поэтому требуемая, а затем и фактическая, скорости поезда снижаются, что приводит к уменьшению отклонения от программного времени хода. При опоf здании поезда сопротивление блока 5 уменьшается (вплоть до нуля при опоздании, равном максимально допустимому), а следовательно, скорость поезда возрастает, что приводит к компенса.. ции опоздания. Если приемник б выдает
сигнал об ограничении скорости движения, то сопротивление блока 5 становится равным нулю, и независимо от величины разности между фактическим и программным временем хода, скорость
5 поезда станет равной заданному уровню ограничения.
Выполнение блока коррекции скорости в виде элемента с управляемой проводимостью и включение его в цепь
0 Питания преобразователя допустимой
скорости позволяет упростить устройство, отказавшись от ряда функциональных блоков. Это упрощение дает возможность увеличить надежность работы
5 устройства. Кроме того, включение
блока коррекции в цепь питания преобразователя при любом отказе блока . коррекции (коротком замыкании или обрыве) не приводит к превышению допустимой скорости поезда.
Формула изобретения
1. Устройство для управления движением поезда, содержащее датчик пути, соединенный с входом блока программ, подключенного выходом к одному входу блока сравнения времени, другой вход которого соединен с датчиком времени, а выход - с входом блока коррекции скорости, преобразователь допустимой скорости, вход которого подключен к приемнику линейных сигналов, а выход - к одному вхо5 ДУ регулятора скорости, другой вход которого соединен с датчиком скорости, отличающееся тем, что, с целью повышения надежности, упрощения и увеличения точности, блок коррекции скорости включен в цепь питания преобразователя допустимой ско.рости и выполнен в виде элемента с управляемой проводимостью, управляющий вход которого подключен к приемнику линейных сигналов.
5 2. Устройство по п. 1, отличающееся тем, что элемент с управляемой проводимостью выполнен в виде коммутатора и подключенного к его шинам секционированного реостата.
сЫср- срfG Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением поезда | 1975 |
|
SU561684A1 |
| Устройство для прицельной остановкипОЕздА | 1979 |
|
SU839808A1 |
| "Устройство автоматического ведения поездов метрополитена | 1962 |
|
SU497184A1 |
| Устройство для управления скоростью подвижного состава | 1983 |
|
SU1106698A1 |
| Устройство программного управления процессом торможения транспортного средства | 1980 |
|
SU903230A1 |
| Устройство для управления движением поездов метрополитена | 1979 |
|
SU918154A1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| Устройство для управления движением поездов | 1976 |
|
SU592067A1 |
| Устройство для упрпвления движением поездов метрополитена | 1974 |
|
SU511240A1 |
| Устройство автоматизированного централизованного управления движением транспортного средства (ТС) городской рельсовой транспортной системы (ГРТС) | 2024 |
|
RU2839020C1 |