Устройство предназначено для автоуправления движением поезда и относится к классу программно-следящих устройств, для которых программа рассчитывается предварительно.
Программно-следящие системы автоуправления обладают наибольшей простотой по сравнению с системами, использующими для расчета траектории движения поезда вычислительные мащины.
Цель изобретения - обеспечение ведения поезда с количеством переключений позиций управления, близким к расчетному, при вариациях параметров движения поезда по отношению к расчетным.
Это достигается тем, что при определении режима ведения поезда используются три программы: программа скорости, времени и расчетной позиции управления в функции от пути, при переменной длине контрольного участка.
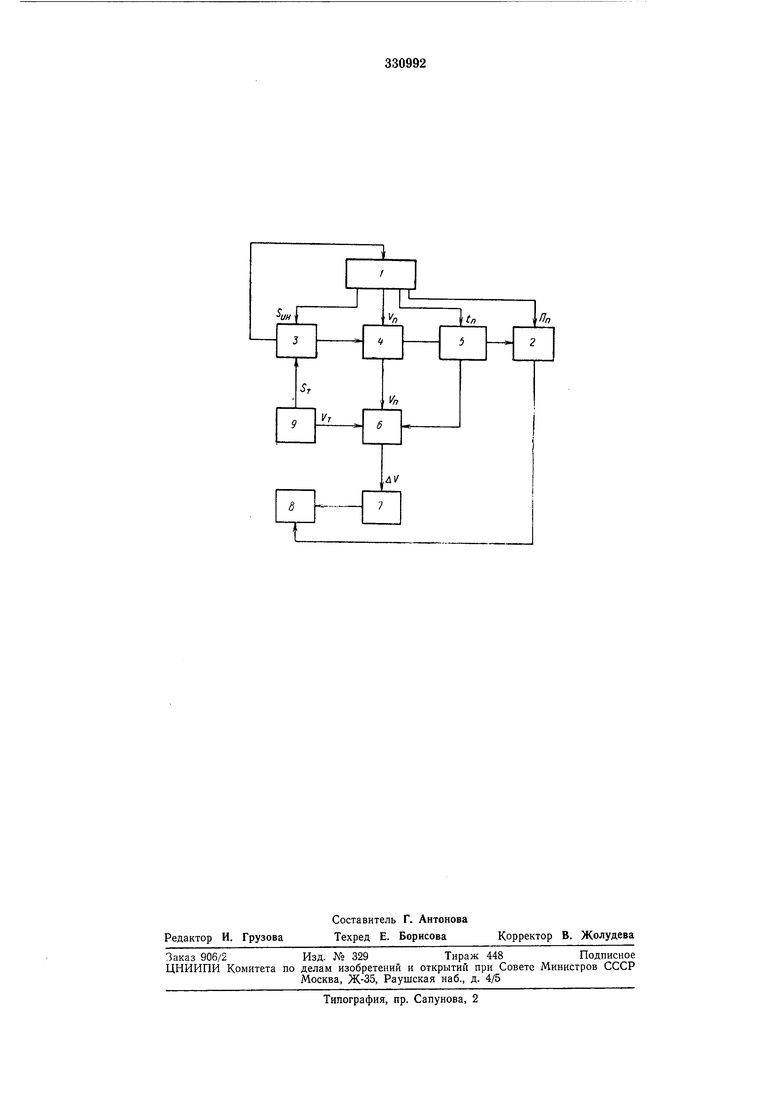
На чертеже показана схема трехпрограммного устройства автоуправления движением поезда.
Схема содержит: блок 1 программ, корректор 2 позиции управления, блок 3 пути, блок 4 построения программной скорости, корректор 5 по времени хода, блок 6 сравнения, блок 7 выбора режима, .исполнительный механизм 8 и блок 9 текущей скорости и пути.
Работа трехпрограммного устройства автоуправления основана на предварительно рассчитанной программе движения поезда. Программа движения поезда в форме зависимости скорости V от пути и соответствующая ей программа времени хода t от пути определяются предварительно, как оптимальная траектория движения поезда по расходу энергии для усредненных расчетных параметров поезда. После определения программной траектории движения поезда Va(S) весь участок пути разбивается на контрольные участки из того условия, чтобы на каждом контрольном участке можно было бы с заданной точностью
интерполировать ип{5) линейно от начальной и конечной скорости.
Границы контрольного участка выбираются из условия, чтобы внутри его не было переключений программных позиций управления.
Месга переключений программных позиций должны совпадать с границами контрольного участка.
Все три программы в виде: программной скоростп в конце участка О;, программного
времени хода по контрольному участку п, расчетной программной позиции управления Яц и величины контрольного участка записываются в двоичном коде в блоке программы. В 1ачале контрольного участка из блока 1
Пп переписывается в блок коррекции позиции управлепия, величипа контрольного участка - в блок 3 пути, величипа программной скорости для конца контрольного участка Vi - в блок 4 построения программной скорости, программное время хода по коптрольному участку - в блок коррекции времени.
Алгоритм работы корректора позиции управлепия следующий. Если величииа модуля разиости Аи программиой скорости в начале рассматриваемого коитрольного участка i-i и текущей скорости v в иачале коитрольного участка превышает принятую доиустимую величину Дудоп, то номер позиции управления измершется иа единицу относительно расчетной программой Яц. При включается тяговая позиция управления //п+ь «i при тяговая позиция управления Лц-ь Если /А1)/- ДУдоп, то включается программная позиция управления.
Впутри контрольного участка режим ведения иоезда определяется скоростпой программой Vn(S) по следующему алгоритму. Сравиение ирограммной и текущей скорости нроводится дискретно в определепных точках пути. Для этого каждый контрольный участок разбивается па т равных интервалов таким образом, чтобы , где k - целое число. Как показали расчеты, при припятом алгоритме работы устройства достаточно принять .
Из блока 3 пути сигнал коица коитрольного участка поступает в блок 1 программ. Кроме того, в блоке пути вырабатывается команда на сравнение программной текущей скорости в конце интервала. Для упрощеппя блока пути при переменном контрольном участке в блоке программ запомипается только величииа интервала данного коитрольного участка. При прохождении т интервалов в блоке лути вырабытывается сигнал конца контрольного участка. По значениям программной скорости в начале контрольного участка Wi-i и в конце контрольного участка Vi построитель программной скорости определяет программпую скорость УП для конца каждого иптерзала внутри контрольного участка
у.Vt-l
УП У/-1 + .
где Шг - номер интервала.
Так как , то вместо операции деления
.можно величину - иолучить с иомощью
да
сдвига на /г разрядов вправо. Величина УД передается на блок 6 сравнения.
Корректор 5 по времени хода сравнивает в конце контрольного участка программное время хода /п по контрольному участку с действительиьш временем хода. Если разбаланс по времени превышает допустимую величину, то проводится коррекция ирограммиой скорости Vi для коица следующего контрольного участка.
В конце каждого интервала в блоке 6 сравнения сравнивается программной скорости Un с текущей скоростью поезда. Если величииа разбаланса АУ УП - УТ превыщает-зону нечувствительности, то в блок 7 выбора режимов постуиает команда на изменение позиции управлеиия локомотивом. В зависимости от зиака Аи осуществляется увеличение или уменьшение номера позиции уиравления на одну позицию. Выбранная позиция управлеПИЯ передается на исполнительный механизм управления локомотивом.
Предмет изобретения
Трехпрограммное дискретное устройство автоматического управления движением иоезда, содержащее блок программ, соединенный с блоком пути и корректором по времени хода, блок сравиения, соединенный с блоком текущей скорости и иути, блоком построения ирогра.ммной скорости и блоком выбора режима, соединенным с исполнительным механизмом, отличающееся тем, что, с целью повышения точности работы устройства, оно содержит корректор нозиции управления, причем выход блоха программ соединен с одним из входов корректора позиции управления, другой вход которого подключен к входу корректора по времепи хода, а выход соединен с исполнительным механизмом, выход корректора по времени хода подключен к входу блока сравнения, блок пути подключен к блоку текущей скорости и пути, а входы блока построения програм.мпой скорости соединены с выходами блока пути и блока программ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления движением поезда | 1975 |
|
SU667429A1 |
| Устройство для управления движением поезда | 1975 |
|
SU561684A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 1968 |
|
SU207966A1 |
| ПРОГРАММНО-СЛЕДЯЩЕЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 1970 |
|
SU262151A1 |
| Устройство для автоматического управления локомотивом или самодвижущимся вагоном | 1958 |
|
SU122446A1 |
| Система автоматического управления движением поездов | 1975 |
|
SU768685A1 |
| Устройство для интервального регулирования движения поездов | 1984 |
|
SU1220999A1 |
| Устройство для управления скоростью подвижного состава | 1983 |
|
SU1106698A1 |
| Устройство для автоматического управления движением поезда | 1981 |
|
SU1044524A1 |
| Устройство для автоматического управления движением поезда | 1978 |
|
SU742185A1 |