1
Изобретение относится .к .вычислительной и 1контрольно-измерительной технике и может быть иснользовано при контроле работоспособности различных радиоэлектронных объектов, например систем автоматического упра1Блеиия.
Известны устройства для автоматического контроля сложных О:бъектОВ, содержащие коммутатор-нормализаторанализируемых
сигналов, решаюншй блОК, компаратор, анализатО|р, индикатор, блок управления, запоминающее устройство, генератор стимулирующих сигналов, подключенный выходом ко входу контролируемого объекта. Эти устройства позволяют производить только интегральную оценку работосБосо.бности контролируемого объекта. Локализация «ейсправностей с помощью этих устройств затруднительна. Наиболее близким к изобретению техническим решением является устройство для автоматического контроля сложных объектов, содержащее коммутатор-нормализатор, первые выход и .вход которого соединены соответственно со входом и выходом объекта контроля, генератор стимулирующих воздействий, выход которого .соединен со вторым входом коммутатора-нормализатора, а вход - с первым выходом блока управления, решающий блок, выход которого соединен с иер1вым входом блока сравеиия, запоминающий -блок.
первые выход и вход которого соединены соответственно с иервым входом и вторым выходом блока управления, а второй выход - со вторым входом блока сравнения, анализатор, вход которого соединен с выходом блока сравнения, а выход через индикатор соединен со вторым входом блока управления, третий и четвертый выходы блока управления соединены соответственно с третьим входом коммутатора-нормализатора и с управляющим входом решающего блока. С помощью этого устройства техническое состояние контролируемого объекта определяется на основе вычисляемых в процессе контроля коэффициентов ai, bk дифференциального уравнения, описывающего динамические свойства контролируемого объекта
(t}
ay (О
%.
+ y{t), , (I) dt dt
где x(t) -входное воздейст;вие; y(t) - реакция объекта на это воздействие.
95 При этом искомые коэффициенты выражения (1) на.ходятся путем решения .системы линейных алгебраических неоднородных уравнений
t(-i).w
3
т
,. ,/ft (t) bk- ()df +
k-s
dt
т
+ (t)dt, ,l,2,...Q, (2) 6
где Q n + m+, a|5()-стимулирующие функции,
Т - время Наблюдения сигналов.
Из выражения (2) видно, что три контроле сложных 0бъекто1В с большим количеством динамических параметров Q затрудняется реализация генераторов производных стимулирующих функций г|з(0, (Воспроизводящихс необходимой точностью указанные производные высснкого порядка. Кроме того, при контроле с иапользованием соотнощения (2) возникает прО|блема получения корректного рещения системы уравнений, что с помощью известного устройства достигнуть трудно. Последнее приводит к значительным погрешностям при определении контролируемых -параметров.
Целью изобретения является повышение достовериости контроля. В предлагаемом устройстве это доспигается тем, что в него введены инверсный преобразователь временного масштаба, блок апериодических звеньев исрВ01Ю порядка, управляемый коммутатор и масштабирующий суммирующий блок, причем второй выход и четвертый вход коммутатора-нормализатора соединены соответственно со входом и выходом инверсного преобразователя временного масштаба, управляющий вход которого соединен с пятым выходом блока управления, третий выход коммутаторанормализатора соединен с первым входом решающего блока и через последовательно соединенные блок апериодических звеньев первого порядка, управляемый коммутатор и масщта|бирующий суммирующий блок - с группой входов рещающего блока, шестой выход блока управления соединен с управляющими входами управляемого коммутатора и масштабирующего суммирующего блока.
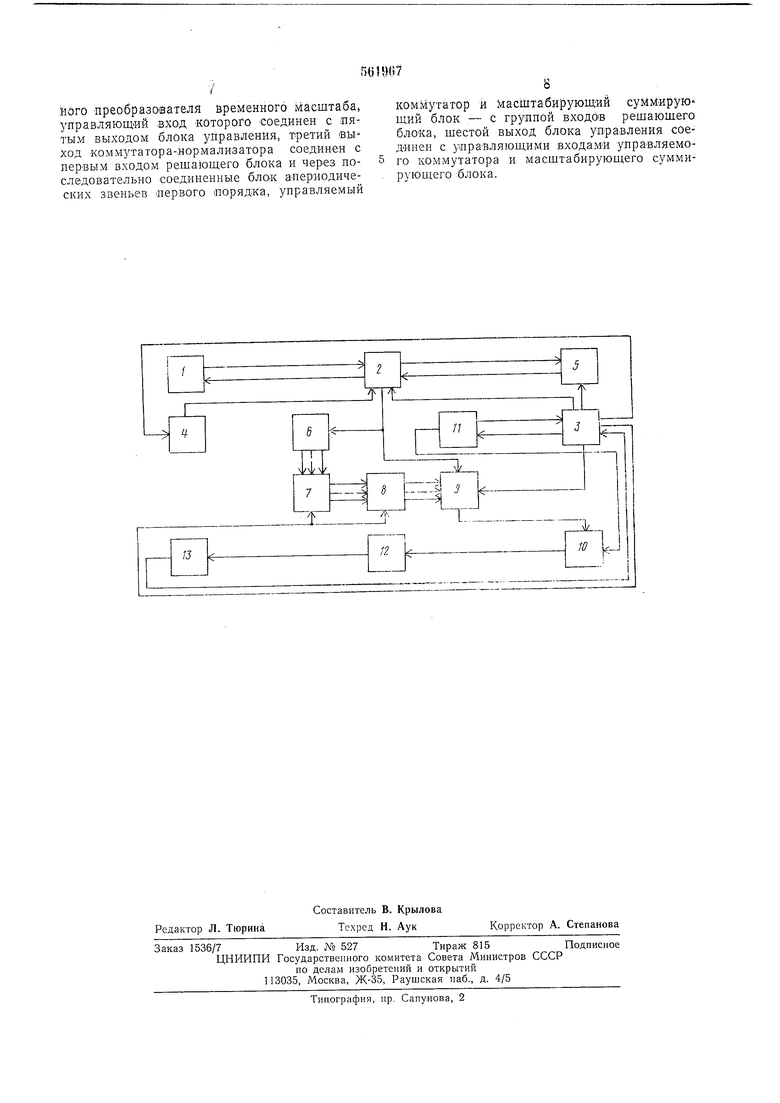
На чертеже представлена функциональная схема предлагаемого устройства.
Оно содержит объект контроля 1, коммутатор-нормализатор анализируемых сигналов 2, блок управления 3, генератор стимулирующих воздействий 4, инверсный преобразователь временного масштаба 5 анализируемых сигналов, блок апериодических звеньев первого порядка 6, управляемый коммутатор 7 фиксированных значений характеристик МНИмых частот указанных выше сигналов, масшта-бирующий суммирующий блок 8 с двумя группами управляемых сопротивлений, решающий блок 9, блок сравнения 10, запоминающий блок 11, анализатор 12 и индикатор 13. К объекту контроля 1 устройст1во подсоединяется через коммутатор-нормализатор 2. Программы контроля и Необходимые константы хранятся в запоминающем блоке 11.
По командам блока управления 3 устанавливаются в исходное состояние все блоки устройства, а на объект 1 в статическом состоянии генератор стимулирующих воздействий 4 через коммутатор-нормализатор 2 выдает пробный сигнал x(t). В результате этого на выходе объекта 1 появляется реакция y(t. Сигналы А (/) и y(t) через коммутаторнормализатор 2 по соответствующим каналам поступают на вход инверсного преобразователя временного масштаба 5, где производится их запись. Затем осуществляется воспроизведение сигнала г/(т) в обратном порядке со скоростью, зависящей от соотпошения длительности Гч его записанной реализации y(t)
и величин постоянных времени Т; -.
апериодических звеньев блока 6. Указанные соотнощения определяются Необходимым быстродействием устройства и требованием выполнения с допустимой погрешностью условий
7.;с(:)/ йт-О,
f/y(T)/ и .:;:; О,
где т - текущ.се время воспроизведения, TI - длительность воспроизведения сигналов. Считанный сигнал у(Ть-т) иостунает через коммутатор-нормализатор 2 на апериодические звенья блока 6 и вход решающего блока 9. Па выходах апериодических звеньев в момент времени фиксируются сигналы, пропорциональные выборкам характеристики мнимых частот У(hjg) сигнала г/(т), определяемым при действИтельных значениях комплексной переменной p hj«
y(t,}- y(
, y-I,2,.. .g-j.
b
Полученные таким образом сигналы с помощью управляемого коммутатора 7 п мас1птабируюп1,его суммируюЕцего блока 8 преобразуются и имеют вид
(3)
(.) -1,2Л..д,
где Сг-коэффициент разложеНИя функции г/(т) по ортонормированной системе .базисных функций (например, таких, как ортогонализированные экспоненциальные функции, смещенные на интервал О, оо, ортонормированные фУНкции Якоби и т. д.) вида
r,.rV
(4)
Л) 2/г
где rij, hj - константы, определяемые ВИДом функций фг (т), б5 g - масштабный коэффициент. В решающем блоке 9 производится преобразощание сигналов у(Ть-т) и С, согласно выражению - fV(-), о 1
где .величина выбирается в зависимости от количества определяемых коэффициентов выражения (1). В блоке сравнения 10 производится сравнение селичипы е с ее донустимым значением Д, хранящимся в запоминающем блоке И. При этом различаются два случая. Первый случай: . По сигналу с блока управления 3 производится перестройка коммутирующих нелей управляемого коммутатора 7 и зправляемых сопротивлений первой группы масштабирующего суммирующего блока 8 (производится смена системы базиспых функций). Вновь выполняются онерации (3), (5). Указанная последовательность операций повторяется до тех пор, пока не будет выполняться условие . Второй случай: . По команде с блока управления 3 в решающем блоке 9 фиксируются сигналы С,- и т раз производится перестройка управляемых сопротивлений второй группы мас1птабируюн1,его суммнруюн1,его блока 8 с фиксацией в решаюн1,ем блоке 9, после каждой перестройки, величин
4ift,2,..m,
2/-,,(Л,,/Г(/г,.,),
ik
,ji - 1, z.,.. . V
Затем уг.равляющие сопротивления второй группы масщтабирующего суммирующего блока 8 возвращаются в исходное состояние, апериодические звенья блока 6 освобождаются от запасенной в них энергии, а из инверсного преобразователя временного масштаба 5 через коммутатор-нормализатор 2 нроизводится воспроизведение сигнала x(Ti,-т) с такой же скоростью, с которой оеуш,ествлялось считывание сигнала у(Ть-т). При этом на выходах анериодических звеньев блока 6 образуются сигналы, в момент времени пронорциональные выборкам характеристики мнимых частот x-(hjg) сигнала .у(т), соответствующим значениям p hig
т X (йд,) х (т) d-.
о
Указаиные сигналы управляемым коммутатором 7 и масщтабирующим суммирующим блоiKOM 8 нреобразуются согласно выражению
4-i7-(Vb - 2 --Q; i
Полученные сигналы Gfo фиксируются в решающем блоке 9. Далее выполняются п раз те же самые онерации, что и при получении величин Ягь- При этом определяются и фиксируют1ся величины
,- ,2, .../г,
Gil 2 СЪ-г) t 1, 2,... Q.
}-
C,a,G,,,H,
(6)
1 0
Q Корректность решения системы уравнений (6) обеспечивается вы-бором такой ортономироваиной системы функций ф,-(т) вида (4), чтобы выполнялось условие (процедура выбора указанной базисной системы опйсывалась выше при рассмотрении первого случая). Сигналы, иропорциональные искомым коэффициентам оь, йл, коднруются и поступают в блок сравнения 10, где полученные коды сравннваются с хранянхнмися в запо, минающем блоке 11. Результаты сравнення поступают в анализатор 12, где осуществляется их логическая обработка и формируются управляющие сигналы для индикатора 13.
Использование в предлагаемом устройстве блока анериоднческнх звеньев первого рода
° вместо блока генераторов стимулнрующих функций и их производных, а также } аличие унравляемого коммутатора и масигтабируюН1,его суммирун1,его блока с двумя группами унравляемых сопротивлений, автоматически
- перестраиваемых в процессе контроля нрн выборе ортонормированной базисной снстемы функций, значительно повышает точность и номехозашищенность контроля.
5Формула изобретения
Устройство для автоматического контроля сложных объектов, содержащее коммутаторнормализатор, первые выход и вход которого соединены соответственно со входом и выходом объекта контроля, генератор стнм}лируюи1,их воздействий, выход которого соединен со вторым входом коммутатора-нормализатора, а вход - с первым выходом блока }нравления, решаюц1,ий блок, выход которого сое5 дингн с нервым входом блока сравен)ш, заноминающнй блок, первые выход н вход которого соединены соответственно с первым входом и вторым выходом блока управления, а второй выход - со вторым входом блока
0 сравнения, анализатор, вход которого соединен с выходом блока сравнення, а выход через индикатор соединен со вторым входом блока управлення, третий и четвертый выходы блока управления соединены соответственно с третьим входом коммутатора-нормализатора и с управляющим входом решающего блока, отличающееся тем, что, с целью повышения достоверности контроля, в устройство введены инверсный преобразователь временного масштаба, блок анериодических звеньев первого порядка, управляемый коммутатор и масштабирующий суммирующий блок, причем второй выход и четвертый вход коммутатора-нормализатора соединены
соответственно со входом и выходом инверсПл ооювании полученных велични Cj, Hik, Gig Gi в рещающем блоке 9 осуществляется вычисление искомых коэффициентов а/, bh выражения (1) путем решения системы линейных алгебраических уравнений
iibro преобразователя временного масштаба, Заправляющий вход которого Соединен с пятым выходом блока управления, т ретий еыход коммутатора-нормализатора соединен с первым входом решающего блока и через последовательно соединенные блок апериодических звеньев первого порядка, управляемый
8
коммутатор и масштабирующ-ий сумм-ирую щий блок - с группой входов решаюш.его блока, шестой выход блока управления соединен с управляющими входами управляемого коммутатора и масштабирующего суммирующего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля сложных объектов | 1977 |
|
SU661554A1 |
| Устройство для контроля динамических систем | 1979 |
|
SU769497A1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Устройство контроля качества вокодерных каналов | 1986 |
|
SU1381724A1 |
| Устройство для контроля динамической системы управления | 1979 |
|
SU875345A1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1381420A1 |
| Система автоматического регулирования | 1988 |
|
SU1569802A1 |
| Устройство для контроля параметров линейных интегральных схем | 1986 |
|
SU1397859A2 |
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Устройство для диагностирования технических объектов | 1982 |
|
SU1072059A1 |
-Л
4
т:
jff
