Изобретение относится к технике контроля дииамичесмих систем и может иайти пр|Именение при «о.нтроле .систем автоматического у1правления.
Известно устройство кантрол1Я динам,ичваких систем, основаиное -на определении отклонения временной характеристики объекта от эталонной 1. Оно содержит геHiepaTOip сти мул1И1рующих воздействий, спектральный а1нализ;ато,р я су1ММИрующий блок. Однако (С П01МО(ЩЬЮ этого- устройства весьма сложно определять отклонение /временной характеристики объекта от эталонной.
Наиболее бдизким тех«;Ически1М решение м к изобретению является устройство для контроля систем, содержащее генераTOip сШ.мул.ируюищх воздействий и юпектральный анализатор, соединенные с ди намической системой, суММирующий блок, связанный с блокаМ|И сравнения ,и оценки результата, блок вычитающих устройств, соединенный со спектральным анализатором, 1И блок жвадраторов, соеднненный суммирующим блоком (2.
Недостатками этого устройства являются йевозможность ;про;из1водить конироль динаМичеоких систем в процессе функционирова.н1ия в рабочем режиме и недостаточная помехозащищенность конт1роля.
Целью изобретения является получение возможности производить контроль динамических систем в процессе функционирования в рабочем реж1име и повышение ло5 мехозащиаденности устройства.
Эта цель достигается тем, что в устройство для Контроля динамических систем, содержащее генератор стимулирующих воздействий, подключенный пфвым выходом
10 к выходу устройства, и блок алгебраического Сумм1ирования, связанный выходом через последовательно соединенные блок ивадраторов, сум1мирующи.й блок и блак сравнен|ия со (входо.м блока оценки резуль15тата, введены последовательно соединенные масщтабнрующий блок, блок апериодических звеньев, коммутатор, масщтабирующий сумми1рующий блок, блок ключей и блок интеграторов, выход которого (подклю20чен ко входу блока алгебраического суммирования. Второй вход блока ключей соединен со вторым выходом генератора стимулирующих воздействий, а вход |ма1сштабирующего блока - со входом устройства.
На чертеже приведена функциональная
25 схема устройства.
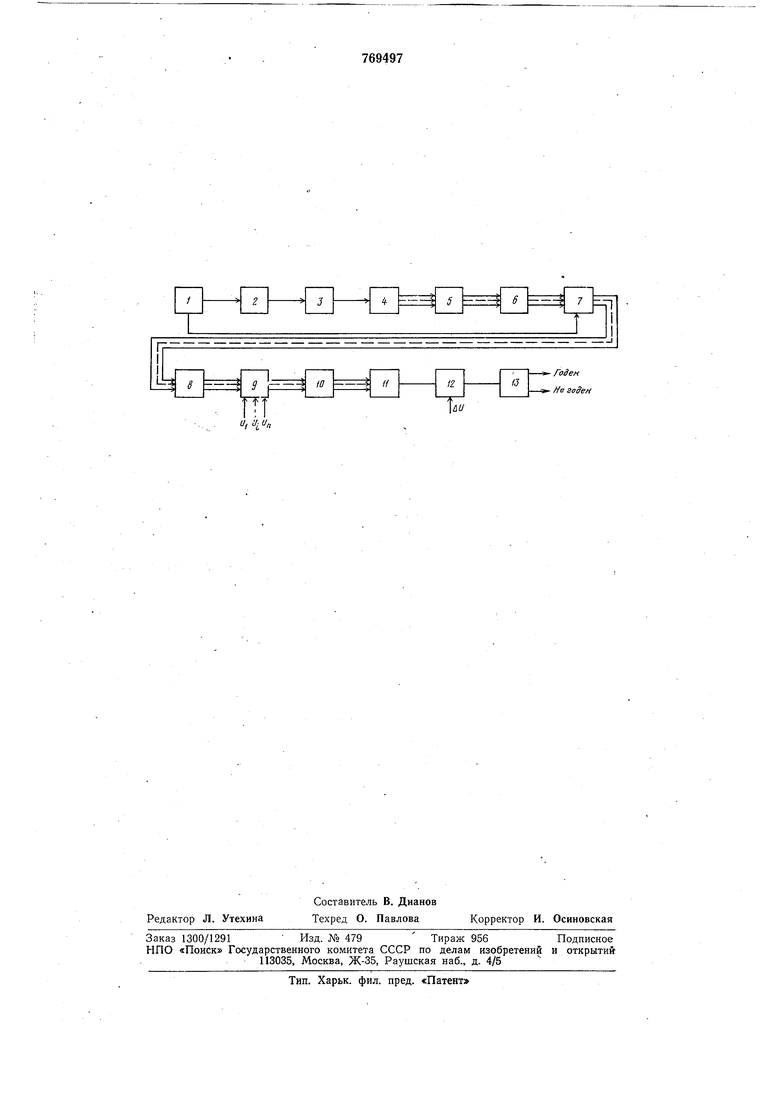
Оно содержит генератор стимулирующих воздействий /, объект контроля (динамическую систему) 2, ма1сщтаби1рующий
30 блок 3, блок :а1пер|Иодических звеньев 4,
коммутатор 5, масштабирующий суммирующий блок 6, блок ключей 7, блок (интеграторов 8, блок алгебраического суммирования 9, блок квадратаров 10, суммирующий блок //, блок |арав ненля 12 и блок оценки результата 13.
На Ч|бртеже обозиачены Ll, Ui, п - эталонные .натряжения, пропорциональные по :велич;ИН1е нам1ИИгальным знач ениям соютветственло перво го, /-го |И га-гр 1коэфф|иц«бнтов разложения (Фурье) Cj, с,-, с„ импульсной (весовой) xiajpактеристик-и о.бъекта контроля (|Дииа(мичбокой системы) 2 k(t), имеющие знаки, обратные знакам указанных коэфф ищиснтав; AU - эталонное 1Н.ап1ряжен1Ие, иропордиональное по величине К1вадрату допуст1И|Мого зиачения оредне К1В1адратичного отклонвн.и.я весовой характаристики контролируемой системы k(t) от номинальной характеристики k(i:). У|СТ1рой:ст о работает следующнм обраНа вход фумкциоЕирующей в рабочем 25 режиме ко нтролируемои ,динам1Ическои системы Объекта 2 поступает с предыдущего объекта р.абочий .аигнал x(t). Дополнительно с перВОго выхода генератора / иа тот же вход ,аи:стемы 2 подается/не коррелиро- 30 ваиное с снпналом x(t) И1спытательное (стимулирующее) кусочно-постоянн ое воз-, действие инпа псевдослучайной. двоичной последовательности («ацример, М-последовательности) с(,/) с нулевымматематиче- 35 СКИ1М ожиданием и периодам, соответствующим времени (корреляции Т взаим,но-корреляадионной функции (t) пробного воздействия и реакции объекта 2y(t) на суммарное воздействие z(t) c{t) + x(t). При «а выходе блока 3 возникает сигнал, пропорциональный по )велич1Ине . So где So - спектральная плотность мощно сти перИодическОГО двоичн:ого шума c(t); g - временной масштаб. В результате во здействия .сигнала (2) на ВХОД блока 4 с постоянными времени Tj j, i l,2,...,m,(3) оде Л/ определяетсй видом используемого для а пгарокаимации сигнала R су (t) ортонормированных на интервале О, оо функций
4S(t.. , „,
(f-1,2,..., п, r/j, hj
:4)
- константы)
на выходах блока 4 образуются реакции yj(t(l- 1,2,..., т).
10 По1следн1ие связаны с входным воздействием y(t) вы)р;ажен.Иам
Д/) ZZ. J y«(i-T), /-1,2, ...,ш, (5)
У/описывающим процессы на выходах линейных звеньев с импульсными переходными функциями
(6)
gl(t} Сигналы г/г ГО С помощью коммутатор.а 5 и блока 6 преобразуются согласно выражедиюUi(t)y rtj-yj(t, i ,2, .../г. Напряжения, снимаемые с вы.ходов блока 6, црОХОДя через блок 7, ,модули1руются кусоч-но-постоянным сигналом c(t), поступающим со второго выхода генератора / (с первого « второго выходов генератора / подаются одинаковые ОИПналы), ) Ui{t)-sigr}c(t),i 1,2, ...,/г, (8) + 1 при c(t) о где signc(/). Подученные таинм образом сигна1лы на выходах блока 7 поступают иа входы блока 8, где пр;ео/бразуют(ся ;в с оответствии с выражениемCt(t)(t)dt,,2,...,n. Учитывая сказа нное, можно записать соот1ношение, связывающее выходные аиг,н:алы блока 8 с входными сигналаМИ блока 3, в виде Yg Г Г :/(0 .Trs-J(Oj У(( - )i(), ,2,..., п.(11) При oEHcaiHHOM выще пробном воздеЙ1СТВИИ c(t) и времени а нализа Окгнала y(t) {соответствует времени корреляции функции су f I ) T h-N-T,,(12) вд,е/: 2, Л/ 511; (7о- дномретность пробного воздействия c(t); Tfe - постояНные времени звеньев конэродируемой динамячеакой Системы; k 1,2, .../; / - количество звеньев, «Огда Обеспечивается в полосе частот мантролируемого объекта ра;вйО мерность спактральной плотности мощности So, и при таких постоянных 1В;рем1еяи апериодических звеньев блока 3 Tj, что сдопустимой погрешностью Можно 1прбнеб(речь 1вел)ичинаМИ Д/ y()e{d, i ,2,..., т в момент времени 7 напряжения на выходах блока 8 будут с достаточной точностью отображать величины коэффициентов разлож1ен:ия Cj взаимно-жорреляционной функции Rcy(t) («мпульоной переходной функции объекта 2 k(t) по базису i фг(0})- ПРИ ЭТОМ ,(T), i 1,2,..., п. Количество составляюЩих базиса 1 ffi(t)} . выбирается, исходя из необходимой точности апирок ш.ма1ци и импулысной характеристики объекта 2k(iy. Вид базисной системы (определяется Необходимой точностью представления k(t) при малом п) и величины постоянных времени Tj |Меняются 1C помощью перестройки блокав 4-6. Зафнксироваияые в -момент времени напряжения (14) далее суммируются в блоке 9 с напряжением f/i, ..., t/t, ..., UnПолученные сигналы возводятся в квадраты блоком 10, выходные сигналы которого суммируются блоком 111. Вычисленный интегральный параметр контроля (квадрат среднеквадратичеокого отклонения импульсной xapiaiKTepMCTHKn контролируемой системы объекта 2k(t) от номинальной k(t)) (с;-сОсравнивается в .блоке 12 с допустимым значением, и по величине отклонения блок 13 выдает один из сигналов «Годен или «Не годен. :Прн .контроле состояния динамической юистемы используются оп1редел1енные л,ри синтезе ее номиналкные значения коэффициентов Фурье Ci, Со, ..., Сп, однозначно отражающие поведение номииальной импульсной характеристики системы k(t) и допустимое значение интегрального парамет)ра контроля.Введение в устройство масштабирующего блока, блока .апериодических званье®, ко1М1мутатора, масштаби рующего суммирующего блока, блока «ключей и блока интеграто;ров позволяет р асширить фуикциояальные возможности устрой|ства и повысить помехозащищенность контроля, что в итоге приводит к у1Вел1ичению эффективности использования устройства для контроля динамической системы. Формула изобретения Устройство для .контроля дин амичеоких .систем, содержащее генератор стимулирующих воздействий, подключенный первым выходом к выходу устройства, и блок алгебраического сум1Мирован:ия, (овязан-ный выходом через последовательно 1соединен-ные блок квадраторов, суМ(МИ1рующий блок и блок срав1нен.ия со входом блока оценки результата, отличающееся тем, что, с целью повышения помехозащищенности устройства, .в него введены по следовательно .соединенные .масштабнрующий блок, ,бло.к аперноддаческих З1веньев, коммутатор, масштабирующий суммируюшщй .блок, -блак (ключей и блок интеграторов, выход, которого подключен ко входу блока алгебраического суммирования, второй вход блока (Ключей соединен со вторым 1выходо1м генератора стимулирующих воздействий, а вход ма сштабирующего блока - со входом устройства. Источ1НИ|К1И информации, принятые во вЕИ1мание ири Экспертизе: 1.Приспосабливающиеся автоматические системы. М., «Иностранная литература, 1.963, с. 408-410. 2.Авторское свидетельство № 489086, кл. G 05 В 23/02, G 06 F 15/46, 1973 (прототил).
HI (/,(/„
UU

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля сложных объектов | 1975 |
|
SU561967A1 |
| Устройство контроля качества вокодерных каналов | 1986 |
|
SU1381724A1 |
| Устройство для автоматического контроля сложных объектов | 1977 |
|
SU661554A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Система технической диагностики динамических объектов | 1986 |
|
SU1587468A1 |
| Система автоматического регулирования | 1988 |
|
SU1569802A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1995 |
|
RU2097818C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1999 |
|
RU2146063C1 |