1
Нообретеино относится к миогоопорным трсигспортиым средствам, в частисюти к способам, их поворота на место.
Известен способ поворота ни месте многоопорпого Кйчосного транспортного сред- ства, обеспечиваемы ; путем разнонаправ- noHHDio врашомпя колес противоположных бортов после предварительного разворота KpaiiHHx колес по касательной к траектории их движения при повороте l.
Недостатками такого способа являются конструктивная сложность механизмов, обеспечивающих предварительный разворот крайних колес, и увеличение продолжительности поворота.
Известен способ поворота многоопорногс транспортного средства, заключак: ;.ипйся в том, что прик.-ищ1-4вают разнонаправленное тяговоо усилие к опорам противоположных бортов 2j,
Этот способ поворота прост и ЕЮ требует дополннтс.чьчых механизмов. Однако из-за особенностей взаимодействия опор, в частности KLX-IOC, с грунто.м прн повороте .при одинак(нои скорости вра.щоипя все.х
ксхлес оорта крайние колеса оказываются недогруженными, т.е. не используются их гюччнцисшьные тяговосцешшю свойства и, кро.;о того, они создают значительные силы сопротивления повороту, что приводит к уменыиению скорости поворота и увеличению энергозатрат.
Цель изобретен1щ - увеличение скорости поворота многоопориого транспортного средства и уменьшение энергозатрат.
Это достигается тем, что перемещают крайние опоры противополо и1ых бортов с больше) скоростью, чем средние.
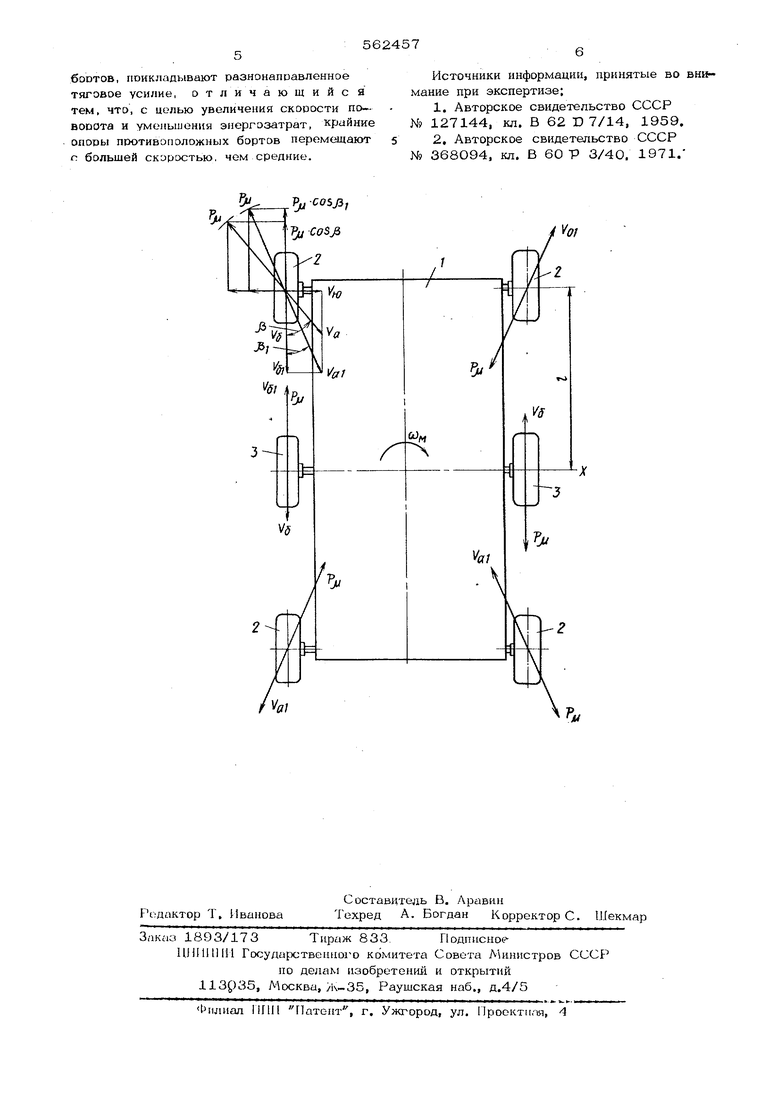
На чертеже изображена схема поворота, многоопорного транспортного средства.
Для осуществления поворота вокруг цент ра О многэопоонэго транспортного средст ва 1, имеющего наири.мер, шесть опор, в ддг1но. случае - две пары крайних 2 и одну пару средних 3 колес, прикладывают р.-с.ишнапраЕленное тяговое усилие к опорам противоположныж бортов. Применительно к данной схеме это обеспечивается раэпопанравлонным Bpii.uieiniex колес противо - 1ЮТОЖНЫХ бортов. 11ри этом, Д.ЧЯ реализаци необходимого пиворачцвающего момента колоса 2 и 3 диджны иметь некоторую окружную скорость проскальзывания oiiopVgi «созываемую скигюстью буксования, а крайние колеса 2, не расположенные на ниле- речной осп X транспортного средства, проходящей через центр поворота, кроме того будут иметь GoKOBoii юз со скоростью V| , называемой скоростью бокового юза, равнойVK,M гдео)- угловая скорость поворота машины 2 - paccTOiiiHie от поперечной оси машины до рс1ссматрпваемого колеса. Тогда aGcoiiKjTtiafl скорость скольжения колеса но грунту будет paBiia v,Vv а между вектором этой скорости и НрОДОЛЬНОЙ осью MiJJJiHHbl /-«g - g4fТаким образом, чем дальше колесо от поперечной осп .чиинпны, тем больше угол Д Для средних колес 3, которьш располой ены на поперсчной оси X , /i - О, а значит ( Va - скорость скольжения). В дальнейшем для простоты понимания физической сущности поворота допускают, чт свойства трення опор (колес) о грунт изо тропны, т.е. лпнии де 1ствия результирующе СШ1Ы трения Рщ и абсоо1ютиой скорости скольжения V-. совпадают, а их векторы а причем велпчппа силы противонсшравлепы д при одинаковой пагрузке па колесо и ностоянпом коэ(я}1пнпенте трения постоянна и онределяется только наличием скольжения oriojjbi о грунт. Соответствие принятых средств взаимодействия одор с грунтом за висит ит CBoiicTB грунта и конструкции on piii. 1ак,на твердых г-рунтах эти свойства являются превшшруюищми, Hii деформируеNn ix грунт х они несколько искажаются. Тогда средние; колеса 3, вследствие oJ сутствия бокоииго к.;.1а, будут загружены окружной сил oil Ру . Кргшнпе /tie колеса 2 наг1)ужепы ок})ужной cmioiiP j-cosji которая MOHj.iiie силы , развиваелшй средними колесами 3. Этот факти объясняет MeHbniyio сзагрузку Kpaiunix колос, в особенности равных скоростях вра. к ал ее бортов. Ксли крайние колеса 2 Bptiiii.rrb с большей скоростьи), нем средние качоса 3, то прн той же скорости поворота (х Kop;iyca Транспоптпого средства это прпводит к увеличепию скорости буксования Vg и уменьшению :пи /З и, вследстви. .Того, К увеличению окружной силы (силы тяги) Р COS/ij и уменьшению боковой силы сопротивления повороту, равнойP 5 rt/3| Р,ц -SJh /3 . Таким образом, увеличение скорости вращения крайних колес, при той же скорости поворота транспортного средприводит К увеличению сил тяги, развиваемых крайни.к4и колесами, т.е. к увеличению поворачиваю-идего момента и к уменьшению сил сопротивления повороту, что, в конечном счете, приводит к увеличению свободного поворачивающего момента, т.е. к способности машины преодолевать больший внешний момент сопротпвления повороту при той же скорости поворота СОд В реальных условиях свободного поворота совместное действие этих факторов приводит, в конечном счете, к увеличению скорости поворота и уменьшению энергозат- рат. Оптимальное соотношение угловых скоростей колес в рели1ме бортового поворота зависит от свойств грунта, г еометрических и конструктивных нарамет 1ов движна еля, Г1редварительные расчеты показывают, что для шестиколесного варианта шасси выбор оптимального значения увеличения скорости вращепия крайних колес может обеспечить такие же характеристики пово- рота, КсЖ и для двухгусеничпого движителя, выполненного в тех ;1че габаритах. Экспериментальные исслс дования бортового поворота на месте восьмиколесного iiiaccn показали, что на сухом песке минимум энергозатрат достигается нри увеличении скорости вращения крайних колос в 1,4 раза, при этом по сравпению с JJOBOротом при равных скоростях вращения колес борта, энергозатраты yмeпьшaкJтcя на 19%, а скорость увеличивается на 40%. Следует заметить, что геометрия пспытуемого шасси не является Хсфактерной для этого спо- соба поворота. Этот способ oco6eiHio эффективен для шасси, у которых отношение про дольной базы к поперечной значт-ельно больше единицы, 11редлс гаемый способ бортового поворо1 а применим для транспортн1лх средств с любым многоопорным Д1 ижитолем; ко/юспым, гусеничным, шага.о.иим н капесно-шагающим. Ф о р м у л а и а о б р о т е н и я Способ поворота JvUiorooHopnoro транспорТЕЮго средс№а па ккстс, злкихчаюлшй.ся. Б том, что к опора.: нроппюппл.о/кных
боотов, гшикладывают разнонапоавленное тяговое усилие, отличающийся тем, что, с целью увеличения скорости поворота и уменьшения энергозатрат, крайние ОПОРЫ ПРОТИВОПОЛОЖНЫХ бортов перемещают г; большей скоростью, чем средние.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 127144, кл. В 62 D 7/14, 1959.
2,Авторское свидетельство СССР № 368О94, кл. В 60 Р 3/40. 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоопорное транспортное средство с бортовым поворотом | 1983 |
|
SU1111926A1 |
| Многоопорное транспортное средство с бортовым поворотом | 1980 |
|
SU910484A1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ МНОГОСЕКЦИОННОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ | 2012 |
|
RU2495562C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| Способ поворота транспортного средства со всеми ведущими и поворотными колесами и устройство для его осуществления | 1990 |
|
SU1776598A1 |
| Способ временного повышения проходимости наземного транспортного средства с базовым шасси и самоходной эвакокапсулой | 2017 |
|
RU2675482C1 |
| Способ поворота многоопорного колесно-шагающего транспортного средства | 1975 |
|
SU522987A1 |
| Полноприводное транспортное средство | 1986 |
|
SU1357296A1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2174085C1 |
