Изобретение относится к многоопорным полноприводным транспортным средствам высокой проходимости, преимущественно автоматическим, работающим в условиях, где необходимо преодоление пороговых препятствий.
Целью изобретения является повышение эффективности путем уменьшения нагружен- ности элементов шасси.
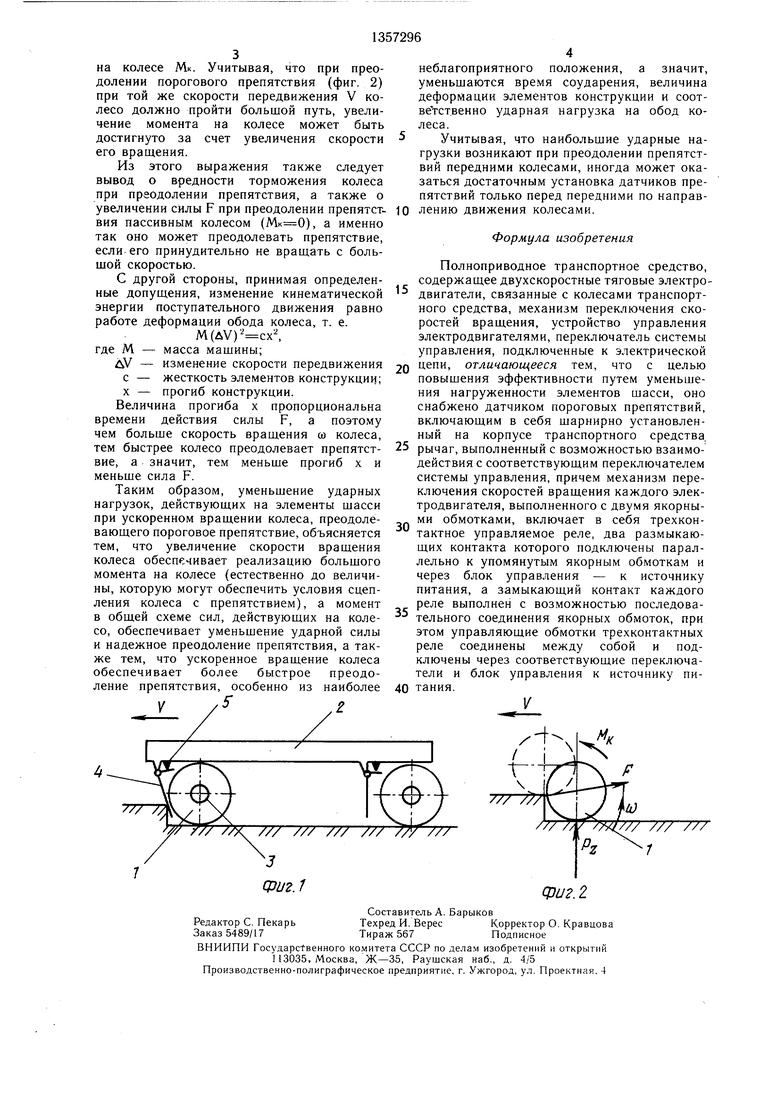
На фиг. 1 представлена кинематическая схема транспортного средства; на фиг. 2 - схема сил, действующих на колесо в момент преодоления препятствий; на фиг. 3 - принципиальная электрическая схема соединений.
Колесное транспортное средство (фиг. 1) содержит колеса 1, укрепленные к раме 2 транспортного средства. Транспортное средст.- во .имеет индивидуальные, встроенные в ступицу колеса 1, элекромеханические тяговые приводы 3 вращения колес 1. Перед каждым колесом 1 по направлению движения установлен датчик препятствий, выполненный в виде щарнирно установленного в раме 2 рычага 4 и конечного переключателя 5.
Каждый тяговый привод 3 содержит тяговый электродвигатель, имеющий две якорные обмотки: первую 6 и вторую 7 (фиг. 3), каждая из которых имеет по два вывода. Механизмы переключения скоростей выполнены в виде электромагнитных реле 8, содержащих два размыкающих контакта и один замыкающий контакт. Обмотки 6 и 7 якоря электродвигателя посредством контактов реле 8 через блок 9 управления соединяются с соответствующими полюсами источника 10 питания. Управляющие обмотки электромагнитных реле 8 через нормально замкнутые контакты концевых переключателей 5 соответствующих датчиков препятствий посредством блока 9 управления подключаются к источнику 10 питания.
Блок 9 управления содержит два реверсора бортов, каждый из которых состоит из двух замыкающих и двух размыкающих контактов, и переключатель скоростей вращения опор, выполненный в виде одноконтактного переключателя. Реверсоры бортов предназначены для изменения направления вращения колес бортов путем изменения подключения выводов обмоток 6 и 7 якоря тяговых двигателей к противоположным полюсам источника 10 питания. Переключатель скорости вращения опор подключает или отключает питание к электромагнитам механизма переключения скоростей, т. е. трехконтактным реле 8.
Транспортное средство работает следующим образом.
В соответствии с назначенным режимом движения блок 9 управления подает питание от источника 10 к якорным обмоткам 6 и 7 и контактным реле 8, причем характер подключения обмоток 6 и 7
0
0
5
5
0
5
40 жением
якоря определяется положением контактов реле 8.
Так, если датчики препятствий не сработали, т. е. замкнуты контакты конечного переключателя 5, при подаче питания блоком управления па управляющие обмотки реле 8 посредством замыкающего контакта этого реле обмотки 6 и 7 якоря подсоединяются к источнику 10 питания последовательно. При этом обеспечивается пониженная скорость вращения колес 1.
При отключении питания от управляющей обмотки реле 8 его размыкающие контакты обеспечивают параллельное подсоединение якорных обмоток 6 и 7 к источнику 10 питания. При этом обеспечивается повышенная скорость вращения колес 1.
Очевидно, что повышенная скорость передвижения должна использоваться при движении по ровной поверхности. Пониженная скорость должна включаться при движении по поверхности с наличием по- poroBbix препятствий.
При этом (фиг. 1) при встрече порогового препятствия перед любым колесом рычаг 4 датчика препятствий, взаимодействуя с препятствием, поворачивается вокруг своей оси и производится размыкание контактов конечного переключателя 5, управляющая обмотка реле 8 этого колеса обесточивается и в этом колесе включается повышенная скорость вращения. После преодоления препятствия все устанавливается в исходное положение.
Рассмотрим, что дает такой способ, когда в колесе, преодолевающем препятствие включается повышенная передача по отноще- нию ко всем остальным. Так, принимая предположение о значительности инерции корпуса машины и недеформируемости порогового препятствия (фиг. 2), сила F, действуюшая на обод колеса при преодолении препятствия, определяется выраием
, - аз.
ением
де а, а2, аз - коэффициенты, зависящие от кинематики подвески колеса и соотношения геометрических размеров колеса и препятствия; m - масса неподрессоренных
частей;
С -жесткость элементов конструкции обод колес - корпус машины; R-вертикальная сила на колесе;
R - радиус колеса.
Как следует из этого выражения, в процессе движения практически уменьшить силу F можно либо уменьшением скорости передвижения V, либо увеличением момента
на колесе Мк. Учитывая, что при преодолении порогового препятствия (фиг. 2) при той же скорости передвижения V колесо должно пройти большой путь, увеличение момента на колесе может быть достигнуто за счет увеличения скорости его вращения.
Из этого выражения также следует вывод о вредности торможения колеса при преодолении препятствия, а также о увеличении силы F при преодолении препятст- ю лению движения колесами.
неблагоприятного положе уменьшаются время соуда деформации элементов кон ветственно ударная нагруз леса.
Учитывая, что наибольш грузки возникают при преод вий передними колесами, и заться достаточным установ пятствий только перед перед
25
ВИЯ пассивным колесом (), а именно так оно может преодолевать препятствие, если его принудительно не врашать с большой скоростью.
с другой стороны, принимая определенные допуш,ения, изменение кинематической энергии поступательного движения равно работе деформации обода колеса, т. е.
М(ДУ) где М - масса машины;
дУ - изменение скорости передвижения с - жесткость элементов конструкции; X - прогиб конструкции.
Величина прогиба х пропорциональна времени действия силы F, а поэтому чем больше скорость врашения со колеса, тем быстрее колесо преодолевает препятствие, а значит, тем меньше прогиб х и меньше сила F.
Таким образом, уменьшение ударных нагрузок, действующих на элементы шасси при ускоренном вращении колеса, преодолевающего пороговое препятствие, объясняется тем, что увеличение скорости вращения колеса обеспечивает реализацию большого момента на колесе (естественно до величины, которую могут обеспечить условия сцепления колеса с препятствием), а момент в общей схеме сил, действующих на колесо, обеспечивает уменьшение ударной силы и надежное преодоление препятствия, а также тем, что ускоренное врашение колеса обеспечивает более быстрое преодоление препятствия, особенно из наиболее
V .2
Формула изобре
Полноприводное трансп содержащее двухскоростны двигатели, связанные с кол ного средства, механизм пе ростей вращения, устройс электродвигателями, перекл управления, подключенные
2Q цепи, отличающееся тем повышения эффективности ния нагруженности элемен снабжено датчиком порого включающим в себя шарни ный на корпусе транспо рычаг, выполненный с возмо действия с соответствующим системы управления, причем ключения скоростей вращен тродвигателя, выполненного ми обмотками, включает тактное управляемое реле, щих контакта которого под лельно к упомянутым якор через блок управления - питания, а замыкающий к реле выполнен с возможно тельного соединения якорн этом управляющие обмотки реле соединены между ключены через соответствую тели и блок управления
40 тания.
V
30
35
/У/ /// ////// //У ///
Фи2.1
лению движения колесами.
неблагоприятного положения, а значит, уменьшаются время соударения, величина деформации элементов конструкции и соответственно ударная нагрузка на обод колеса.
Учитывая, что наибольшие ударные нагрузки возникают при преодолении препятствий передними колесами, иногда может оказаться достаточным установка датчиков препятствий только перед передними по направ
Формула изобретения
Полноприводное транспортное средство, содержащее двухскоростные тяговые электродвигатели, связанные с колесами транспортного средства, механизм переключения скоростей вращения, устройство управления электродвигателями, переключатель системы управления, подключенные к электрической
цепи, отличающееся тем, что с целью повышения эффективности путем уменьшения нагруженности элементов шасси, оно снабжено датчиком пороговых препятствий, включающим в себя шарнирно установленный на корпусе транспортного средства, рычаг, выполненный с возможностью взаимодействия с соответствующим переключателем системы управления, причем механизм переключения скоростей вращения каждого электродвигателя, выполненного с двумя якорными обмотками, включает в себя трехконтактное управляемое реле, два размыкающих контакта которого подключены параллельно к упомянутым якорным обмоткам и через блок управления - к источнику питания, а замыкающий контакт каждого реле выполнен с возможностью последовательного соединения якорных обмоток, при этом управляющие обмотки трехконтактных реле соединены между собой и подключены через соответствующие переключатели и блок управления к источнику питания.
V
Фи2.2
Редактор С. Пекарь Заказ 5489/17
Составитель А. Барыков
Техред И. ВересКорректор О. Кравцова
Тираж 567Подписиое
ВНИИПИ Гocyдapctвeинoгo комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. Ajb Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4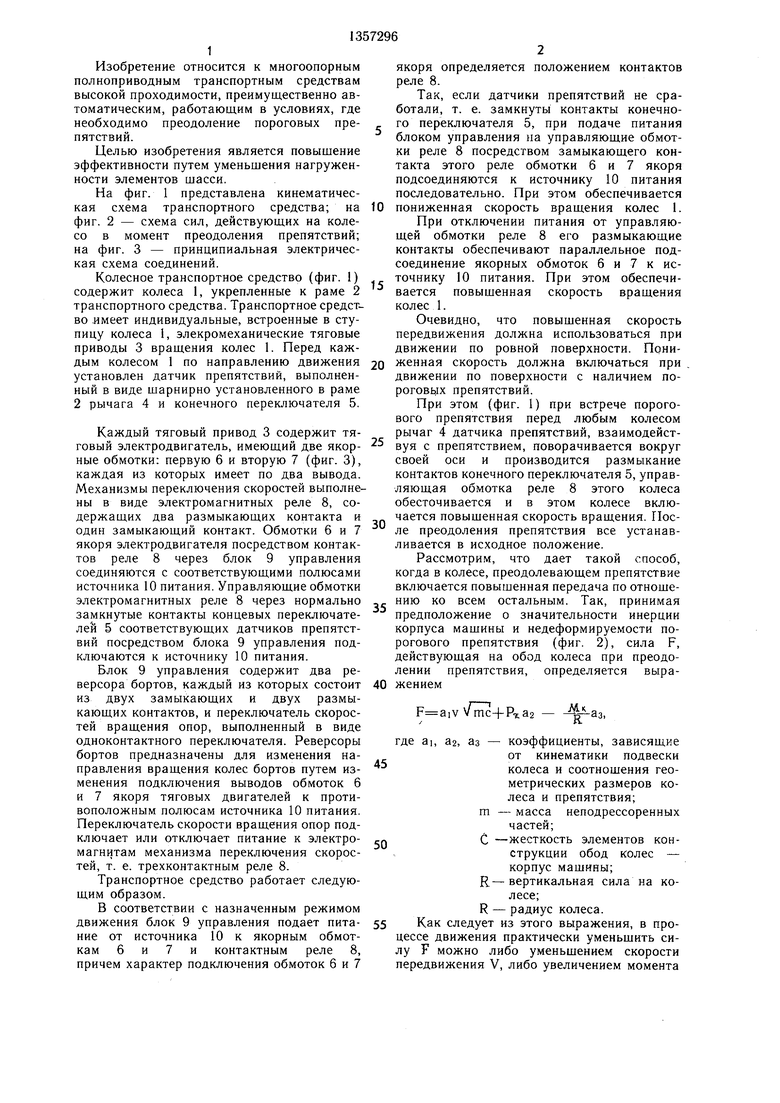
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель | 1979 |
|
SU887340A2 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВИГАТЕЛЕМ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2352052C2 |
| Устройство для управления скоростью транспортного средства | 1987 |
|
SU1495161A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2015040C1 |
| Многоопорное транспортное средство с бортовым поворотом | 1983 |
|
SU1111926A1 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2016 |
|
RU2657157C1 |
| РЕВЕРСНЫЙ ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2115217C1 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2018 |
|
RU2702549C1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2003 |
|
RU2253180C1 |
Изобретение относится к многоопорным полноприводным транспортным средствам высокой проходимости. Цель изобретения - повышение эффективности путем уменьшения нагруженности элементов шасси. Перед каждым колесом установлен датчик препятствий с конечным переключателем 5, контакты которого соединяют источник пи танин 10 с управляюшей обмоткой механизма переключения 8 скоростей перемещения этой опоры, что позволяет уменьшить ударные нагрузки на колеса. 3 ил. (Л ОО ОТ К CD Oi сриг.з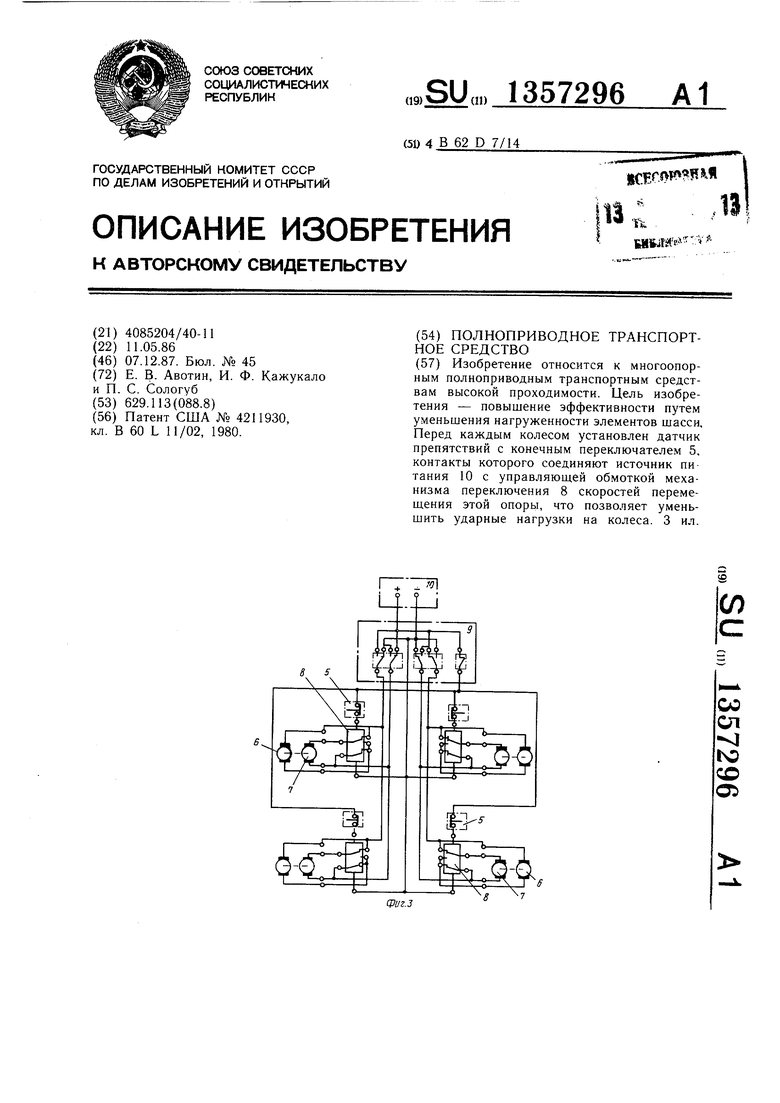
| Патент США № 4211930, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
