Изобретение относится к шагающим транспортным средствам повышенной проходимости и может быть использовано в самоходных многоопорных транспортных средствах с шагающими движителями.
Известны шагающие опоры для многоопорных самоходных машин и для транспортных средств повышенной проходимости, выполненные в виде шагающей опоры, содержащей несущий корпус, на котором с каждого борта установлены по два шагающих движителя, выполненных в виде шарнирных четырехзвенников лямбдаобразного типа и снабженных общим башмаком, а также силовой привод и самоблокирующийся межосевой дифференциал (патент РФ N 2063353, М.кл B 62 D 57/032, 1996 г.).
Недостатками данных шагающих опор являются довольно сложная в конструктивном отношении межбортовая дифференциальная связь, предназначенная для снижения вертикальных колебаний корпуса, обусловленных использованием простейших шагающих движителей лямбдаобразного типа, и невысокая проходимость из-за низких возможностей шагающей опоры по адаптации к неровностям грунта, что обусловлено отсутствием системы подрессоривания и их значительными размерами.
Наиболее близким по техническому уровню и достигаемому результату является устройство в виде шагающей опоры для транспортных средств повышенной проходимости (Патент РФ N 2063354, М.кл. B 62 D 57/032, 1996 г.). Шагающая опора содержит несущий корпус, на котором с каждого борта установлены по два шагающих движителя, выполненных в виде шарнирных четырехзвенников лямбдаобразного типа и снабженных общим башмаком, а также силовой привод, кинематически связанный с кривошипами шагающих движителей.
Недостатками данной шагающей опоры являются неравномерность курсового движения шагающей опоры из-за наличия в рабочем цикле фазы движения по инерции, вертикальные колебания корпуса, обусловленные использованием простейших шагающих движителей лямбдаобразного типа и требующие дополнительного подвода мощности на подъем корпуса в каждом цикле (шаге) движения, а также невысокая проходимость вследствие слабой адаптации к неровностям грунта из-за отсутствия системы подрессоривания и громоздкого общего башмака при движении параллельного корпусу опоры.
Данная шагающая опора имеет сравнительно невысокий технический уровень, что обусловлено кинематической схемой силового привода шагающих движителей, который не обеспечивает достаточно хорошего закона движения опорных точек по траектории, вследствие чего имеют место фаза движения шагающей опоры по инерции и вертикальные колебания корпуса. В результате не обеспечивается непрерывность и равномерность курсового движения транспортного средства и требуется дополнительный подвод мощности на подъем корпуса в каждом цикле (шаге) движения. Наличие у известной шагающей опоры, предназначенной для движения по сравнительно ровному грунту, общих башмаков, параллельных корпусу, и отсутствие системы подрессоривания снижает ее возможности по адаптации к неровностям грунта и не позволяет обеспечить остаточно низкое удельное давление на грунт.
В этой связи важнейшей задачей является создание новой компановочной схемы взаимосвязи шагающих движителей с корпусом транспортного средства на основе нового закона движения опорных точек по траектории, обеспечивающей снижение вертикальных колебаний корпуса и равномерность курсового движения шагающей опоры, за счет нового рабочего цикла шагающих движителей, что обеспечивается созданием индивидуальной системы пассивного подрессоривания шагающих движителей посредством рычажной подвески с поперечным качанием рычагов, взаимосвязанной с силовым приводом, что позволяет обеспечить ускоренный перенос башмаков шагающих движителей, улучшенную адаптацию шагающей опоры к неровностям грунта и, как следствие, повышенную проходимость многоопорного транспортного средства.
Техническим результатом заявленной конструкции шагающей опоры является создание новой системы взаимодействия шагающих движителей на базе нового рабочего цикла, обеспечивающим фазу ускоренного переноса башмаков шагающих движителей и значительно уменьшающим вертикальные колебания корпуса в каждом цикле движения, что существенно снижает величину потребной мощности силовой установки транспортного средства, тем самым значительно улучшая ее эксплуатационные характеристики.
Указанный технический результат достигается тем, что шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, содержащих криволинейные опоры, снабженные башмаками, и силовой привод, кинематически связанный с шагающими движителями, содержит шагающие движители, попарно установленные вдоль корпуса, выполненного в виде несущей балки, и соединенные кривошипами с силовым приводом транспортного средства посредством бортовых редукторов и карданных передач, при этом вилки промежуточных валов карданных передач расположены во взаимно перпендикулярных плоскостях, обеспечивая ускоренный перенос криволинейных опор шагающих движителей, а вилки ведущих валов карданных передач каждой пары шагающих движителей установлены со сдвигом по фазе на четверть оборота ведущего вала, обеспечивая чередование фазы опоры на грунт с фазой переноса, при этом один оборот ведущего вала карданной передачи соответствует двум оборотам кривошипа шагающего движителя, а шагающая опора соединена с корпусом транспортного средства посредством рычажной подвески с поперечным качанием рычагов, снабженной балансирами, один из которых жестко связан с торсионным валом, установленным вдоль несущей балки и жестко закрепленным на ней, причем длины балансиров и промежуточных валов карданных передач выбираются в соответствии с нулевым поперечным смещением башмаков в пределах рабочего хода балансира.
Новая компановочная схема взаимосвязи шагающих движителей с корпусом шагающего транспортного средства основана на создании нового рабочего цикла с неравномерным вращением кривошипов шагающих движителей на базе новой взаимосвязи силового привода и рычажной подвески, что позволяет значительно уменьшить мощность, затрачиваемую на вертикальные колебания корпуса.
Введение в шагающую опору асинхронных карданных передач, обеспечивающих ускоренный перенос криволинейных опор шагающих движителей, позволило создать кинематическую схему привода на базе нового закона движения опорных точек по траектории с использованием в качестве рабочего участка части траектории опорных точек шагающих движителей, близкую к горизонтальной и практически с равномерным движением опорных точек, в результате значительно снижается неравномерность курсового движения, а также вертикальные колебания корпуса.
Введение в шагающую опору новой системы пассивного подрессоривания шагающих движителей позволяет уменьшить удельное давление на грунт за счет увеличения общей площади опорных поверхностей башмаков, непосредственно находящихся в контакте с грунтом, что улучшает тягово-сцепные свойства шагающего транспортного средства и позволяет ему эффективно работать на слабых и экологически ранимых грунтах.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволил выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно заявленное изобретение соответствует требованию "изобретательский уровень".
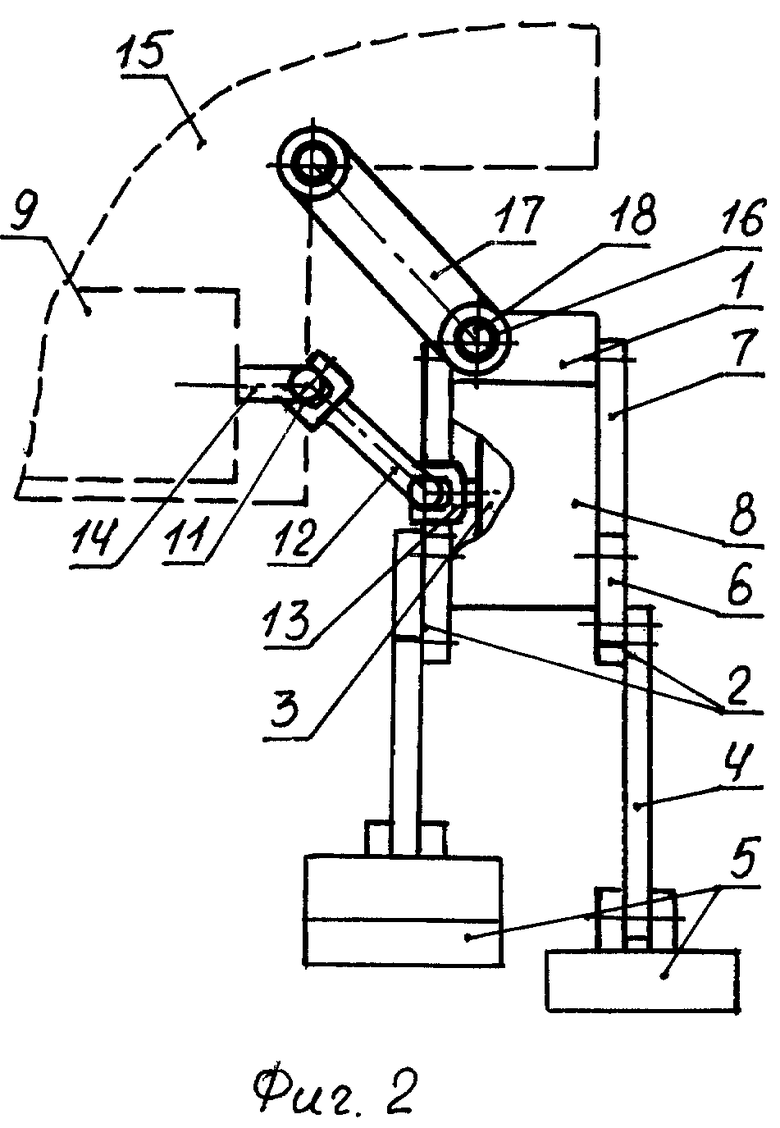
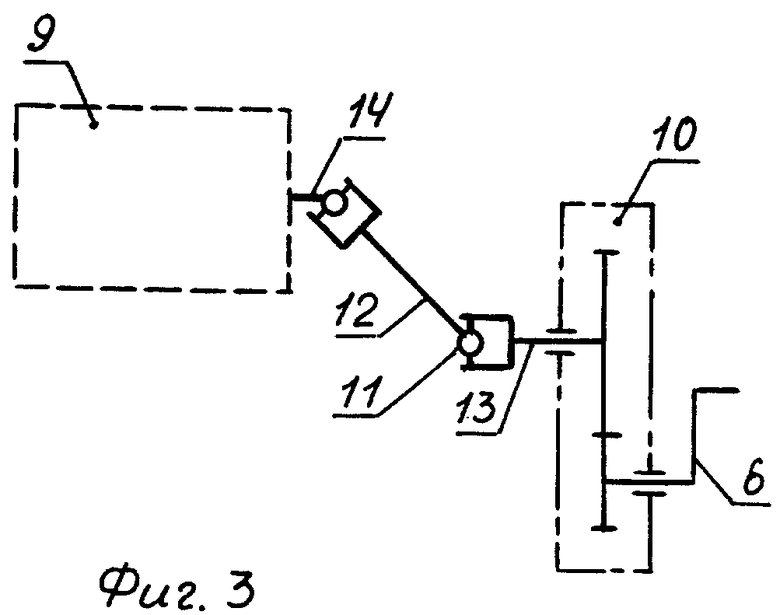
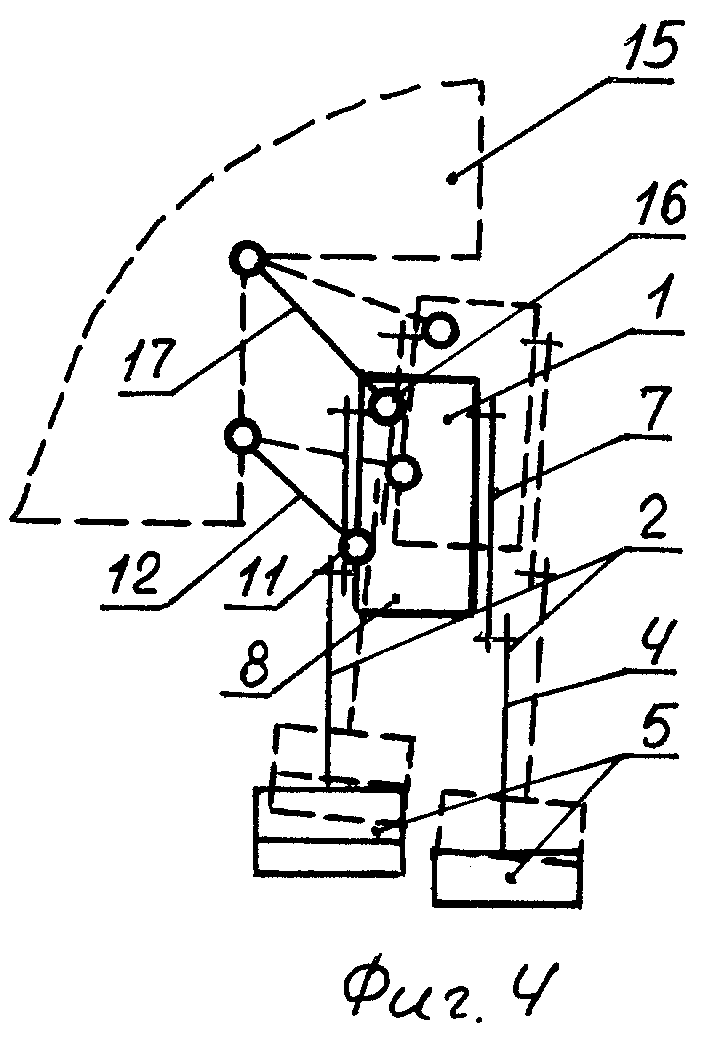
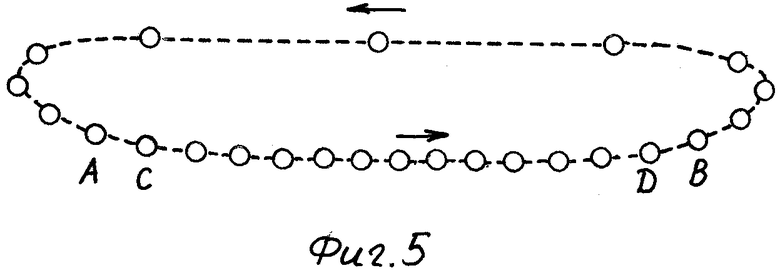
На фиг.1 представлен общий вид шагающей опоры; на фиг. 2 - вид слева на шагающую опору; на фиг. 3 - кинематическая схема силового привода шагающих движителей; на фиг. 4 - схема работы подвески; на фиг. 5 - траектория опорных точек шагающих движителей.
Шагающая опора для транспортных средств повышенной проходимости содержит корпус 1 с установленными на нем шагающими движителями 2 и силовой привод 3, кинематически связанный с шагающими движителями 2 (фиг. 1, 2).
Шагающие движители 2 выполнены в виде шарнирных четырехзвенников лямбдаобразного типа, расположены в вертикальной плоскости и содержат криволинейные опоры 4, снабженные башмаками 5, шарнирно соединенные с кривошипами 6 и с качающимися рычагами 7. Свободные концы качающихся рычагов 7 шарнирно закреплены на корпусе 1.
Шагающие движители 2 попарно установлены вдоль корпуса 1, выполненного в виде несущей балки 8, и соединены кривошипами 6 с силовым приводом 9 транспортного средства посредством бортовых редукторов 10 и карданных передач 11, которые совместно образуют силовой привод 3 шагающей опоры (фиг. 1, 2, 3). Для достижения неравномерности вращения ведомого вала 13 карданной передачи 11 и соответственно кривошипа 6 в каждом цикле движения и обеспечения ускоренного переноса криволинейных опор 4 шагающих движителей 2 вилки промежуточных валов 12 карданных передач 11 расположены во взаимно перпендикулярных плоскостях. Для чередования фазы опоры на грунт и фазы переноса вилки ведущих валов 14 карданных передач 11 каждой пары шагающих движителей 2 установлены со сдвигом по фазе на четверть оборота ведущего вала 14. Поскольку карданная передача 11 обеспечивает за цикл два участка с ускоренным вращением ведомого вала 13, то для обеспечения нормальной работы шагающих движителей 2 - с одной фазой опоры на грунт и одной фазой ускоренного переноса за цикл - передаточное отношение бортовых редукторов 10 выбирается таким образом, что один оборот ведущего вала 14 карданной передачи 11 соответствует двум оборотам кривошипа 6. При этом для обеспечения ускоренного движения опорных точек криволинейных опор 4 и башмаков 5 именно в фазе переноса взаимное расположение вилки ведомого вала 13 карданной передачи 11 и кривошипа 6 шагающего движителя 2 выбирается так, что при положении вилки, соответствующем наибольшей угловой скорости вращения ведомого вала 13, кривошип 6 занимает положение, при котором опорная точка криволинейной опоры 4 находится в верхней части траектории - на участке, соответствующем фазе ускоренного переноса.
Обеспечение фазы ускоренного переноса позволяет использовать в качестве рабочего участка часть траектории опорных точек (фиг. 5) шагающих движителей 2, близкую к горизонтальной и практически с равномерным движением опорных точек. В результате снижается неравномерность курсового движения, а также вертикальные колебания корпуса 1 шагающей опоры.
Шагающая опора устанавливается на корпусе транспортного средства 15 посредством рычажной подвески 16 с поперечным качанием рычагов, снабженной балансирами 17, один из которых жестко связан с торсионным валом 18, установленным вдоль несущей балки 8 и жестко закрепленным на ней противоположным концом. Функции реактивных рычагов в подвеске 16 выполняют промежуточные валы 12 карданных передач 11. Чтобы исключить в процессе работы подвески 16 боковой юз башмаков 5 по грунту, длины балансиров 17 и промежуточных валов 12 выбираются в соответствии с нулевым поперечным смещением башмаков 5 в пределах рабочего хода балансира 17 (фиг. 4).
Индивидуальная подвеска каждой шагающей опоры многоопорного транспортного средства с системой пассивного подрессоривания шагающих движителей позволяет уменьшить удельное давление на грунт за счет увеличения общей площади опорных поверхностей башмаков 5, непосредственно находящихся в контакте с грунтом, что улучшает тягово-сцепные свойства шагающего транспортного средства и позволяет ему эффективно работать на слабых и экологически ранимых грунтах. Кроме того, предложенная схема взаимосвязи шагающих движителей 2 с корпусом шагающего транспортного средства 15 позволяет свести к минимуму мощность, затрачиваемую на вертикальные колебания его корпуса, вызванных как самим принципом шагающего способа передвижения, так и неровностями грунта.
Шагающая опора для транспортных средств повышенной проходимости работает следующим образом. В момент начала движения на силовой привод 3 шагающей опоры подается крутящий момент от силового привода 9 транспортного средства, который через карданные передачи 11 и бортовой редуктор 10 передается на кривошипы 6 шагающих движителей 2 (фиг. 1, 2, 3). Кривошипы 6 шагающих движителей 2 начинают вращаться и приводят в движение криволинейные опоры 4 и качающиеся рычаги 7, тем самым осуществляя движение шагающих движителей 2. При движении вилки ведущих валов 14 карданных передач 11 каждой пары шагающих движителей 2 располагаются со сдвигом по фазе на четверть оборота ведущего вала 14, чем обеспечивается чередование фазы опоры на грунт и фазы переноса. При этом один из шагающих движителей 2 каждой пары находится в фазе опоры на грунт. Благодаря взаимодействию башмака 5 шагающего движителя 2, находящегося в фазе опоры, с грунтом шагающая опора начинает движение.
При движении шагающей опоры шагающие движители 2 последовательно совершают рабочий цикл, включающий фазу опоры на грунт, соответствующий участку АВ траектории опорной точки (фиг. 5) и фазу переноса, соответствующую участку ВА траектории. Полный рабочий цикл (шаг) осуществляется за половину оборота ведущего вала 14 карданной передачи 11, поскольку один оборот ведущего вала 14 карданной передачи 11 соответствует двум оборотам кривошипа 6 шагающего движителя 2.
При равномерном вращении ведущего вала 14 шарнир Кардана-Гука будет обеспечивать неравномерное вращение промежуточного вала 12 карданной передачи 11. Поскольку вилки промежуточных валок 12 карданных передач 11 расположены во взаимно перпендикулярных плоскостях, то неравномерность вращения ведомого вала 13 усиливается. Кривошипы 6 также совершают неравномерное вращение в каждом цикле движения, чем обеспечивается ускоренный перенос криволинейных опор 4 шагающих движителей 2. Карданная передача 11 обеспечивает за один оборот два участка с ускоренным вращением ведомого вала 13. При этом, так как один оборот ведущего вала 14 карданной передачи 11 соответствует двум оборотам кривошипа 6, шагающий движитель 2 совершает два рабочих цикла. Взаимное расположение вилки ведомого вала 13 карданной передачи 11 и кривошипа 6 шагающего движителя 2 обеспечивает ускоренное движение опорных точек криволинейных опор 4 башмаков 5 непосредственно в фазе переноса.
Каждую половину цикла работы шагающей опоры можно подразделять на следующие три основные стадии:
- первый шагающий движитель 2 находится в фазе опоры на грунт в начале участка АВ траектории опорной точки (фиг. 5), второй - в конце фазы опоры на грунт в точке D траектории и совместно с первым шагающим движителем 2 осуществляет рабочий ход;
- первый шагающий движитель продолжает находиться в фазе опоры на грунт, достигает точку C траектории и продолжает осуществлять рабочий ход, второй проходит точку B траектории и начинает фазу ускоренного переноса;
- первый шагающий движитель находится в фазе опоры на грунт и его опорная точка приближается к точке D траектории, второй завершает фазу ускоренного переноса, проходит точку A траектории, входит в зацепление с грунтом и начинает осуществлять вместе с первым шагающим движителем рабочий ход.
После достижения опорной точки второго шагающего движителя точки A траектории начинается вторая половина рабочего цикла, аналогичная первой. При этом первый шагающий движитель меняется местом со вторым.
Подобный новый рабочий цикл шагающей опоры с фазой ускоренного переноса башмаков 5 позволяет в качестве рабочего участка AB взять ту, сравнительно небольшую, часть траектории, где она близка к горизонтальной и где движение опорной точки по траектории практически равномерно (см. фиг. 5, где точки на траектории расставлены через равные промежутки времени). Это резко снижает неравномерность курсового движения шагающей опоры, а также сводит к минимуму вертикальные перемещения ее корпуса в каждом цикле движения.
При движении вертикальные перемещения корпуса 1 шагающей опоры, вызванные как самим принципом шагания, так и неровностями грунта, передаются посредством рычажной подвески 16 на корпус транспортного средства 15 (фиг. 1, 2). Однако, за счет поворота балансиров 17 и угловых деформаций торсионного вала 18 вертикальные колебания шагающего транспортного средства сглаживаются. В результате снижаются энергозатраты на передвижение и повышается комфортность транспортного средства. Поскольку длины балансиров 17 и промежуточных валов 12 набираются в соответствии с нулевым поперечным смешением башмаков 5 в пределах рабочего хода балансира 17, то в процессе работы подвески 16 боковой юз по грунту башмаков 5 исключается (фиг. 4).
Подвеска 16 с системой пассивного подрессоривания шагающих движителей позволяет башмакам 5 каждой шагающей опоры многоопорного транспортного средства индивидуально адаптироваться к неровностям грунта. В результате повышаются их возможности по адаптации к неровностям грунта, уменьшается среднее давление на грунт и улучшаются тягово-сцепные свойства шагающей опоры за счет большей площади сцепления с грунтом. Это повышает возможности шагающей опоры по проходимости на грунтах с низкой несущей способностью и дает ей возможность работать на экологически ранимом почвенном покрове.
После завершения рабочего цикла шагающей опоры он повторяется.
Таким образом, вышеуказанные сведения свидетельствуют о выполнении при использовании изобретения следующей совокупности условий:
шагающая опора для транспортных средств повышенной проходимости предназначена для применения в многоопорных транспортных и транспортно-технологических средствах, работающих на экологически ранимых и с низкой несущей способностью грунтах, причем новая система взаимосвязи шагающих движителей с новым рабочим циклом, обеспечивающим ускоренный перенос башмаков шагающих движителей и их улучшенную адаптацию к неровностям грунта, снижают неравномерность прямолинейного движения и энергозатраты на подъем корпуса в каждом цикле (шаге) движения;
для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью вышеописанных конструктивных решений и способов применения;
шагающая опора для транспортных средств повышенной проходимости, воплощенная в заявленном изобретении, при его осуществлении способна обеспечить достижение усматриваемого заявителем достигаемого технического результата.
Следовательно заявленное изобретение соответствует требованию "промышленная применимость".
Изобретение относится к транспортным средствам. Опора содержит корпус 1, шагающие движители 2 и силовой привод 3. Движители 2 выполнены в виде шарнирных четырехзвенников лямбдаобразного типа, каждый из которых имеет криволинейную опору 4 с башмаком 5 и шарнирно соединен с кривошипом 6 и качающимся рычагом 7 посредством бортовых редукторов, а также карданных передач 11. Вилки промежуточных валов 12 карданных передач 11 расположены во взаимно перпендикулярных плоскостях. Для чередования фазы опоры на грунт и фазы переноса вилки ведущих валов 14 карданных передач 11 каждой пары шагающих движителей 2 установлены со сдвигом по фазе на четверть оборота ведущего вала 14. Поскольку карданная передача 11 обеспечивает за цикл два участка с ускоренным вращением ведомого вала 13, то для обеспечения нормальной работы шагающих движителей 2 - с одной фазой опоры на грунт и одной фазой ускоренного переноса за цикл - передаточное отношение бортовых редукторов выбирается так, что один оборот ведущего вала 14 карданной передачи 11 соответствует двум оборотам кривошипа 6. Опора установлена на корпусе посредством рычажной подвески 16 с поперечным качанием рычагов, снабженной балансирами 17, один из которых жестко связан с торсионным валом 18, установленным вдоль несущей балки 8. Изобретение направлено на уменьшение вертикальных колебаний корпуса в каждом цикле движения и снижения величины потребной мощности. 5 ил.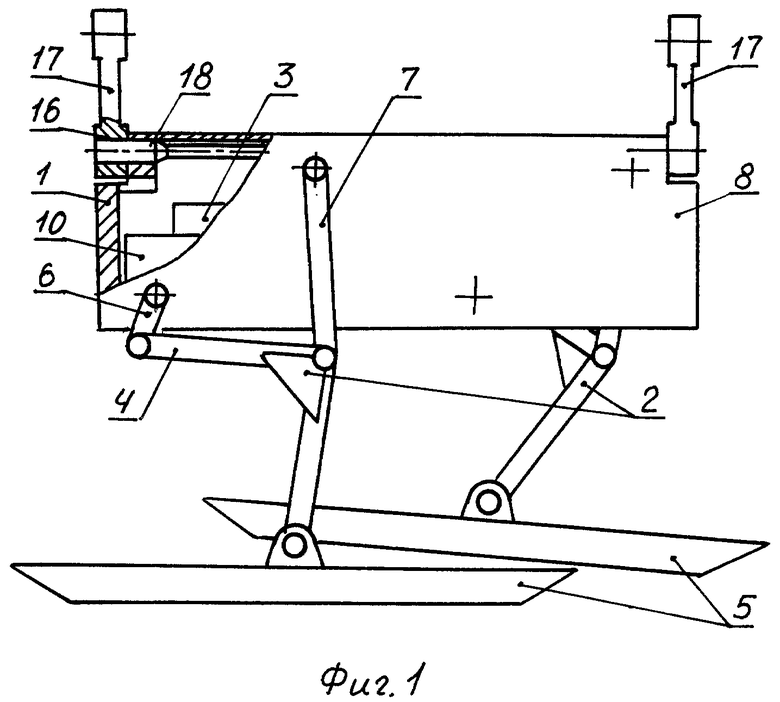
Шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, содержащих криволинейные опоры, снабженные башмаками, и силовой привод, кинематически связанный с шагающими движителями, отличающаяся тем, что она содержит шагающие движители, попарно установленные вдоль корпуса, выполненного в виде несущей балки, и соединенные кривошипами с силовым приводом транспортного средства посредством бортовых редукторов и карданных передач, при этом вилки промежуточных валов карданных передач расположены во взаимно перпендикулярных плоскостях, обеспечивая ускоренный перенос криволинейных опор шагающих движителей, а вилки ведущих валов карданных передач каждой пары шагающих движителей установлены со сдвигом по фазе на четверть оборота ведущего вала, обеспечивая чередование фазы опоры на грунт с фазой переноса, при этом один оборот ведущего вала карданной передачи соответствует двум оборотам кривошипа шагающего движителя, а шагающая опора соединена с корпусом транспортного средства посредством рычажной подвески с поперечным качанием рычагов, снабженной балансирами, один из которых жестко связан с торсионным валом, установленным вдоль несущей балки и жестко закрепленным на ней, причем длины балансиров и промежуточных валов карданных передач выбираются в соответствии с нулевым поперечным смещением башмаков в пределах рабочего хода балансира.
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 4527650 A, 09.07.1985 | |||
| US 5219410 A, 15.06.1993. | |||
