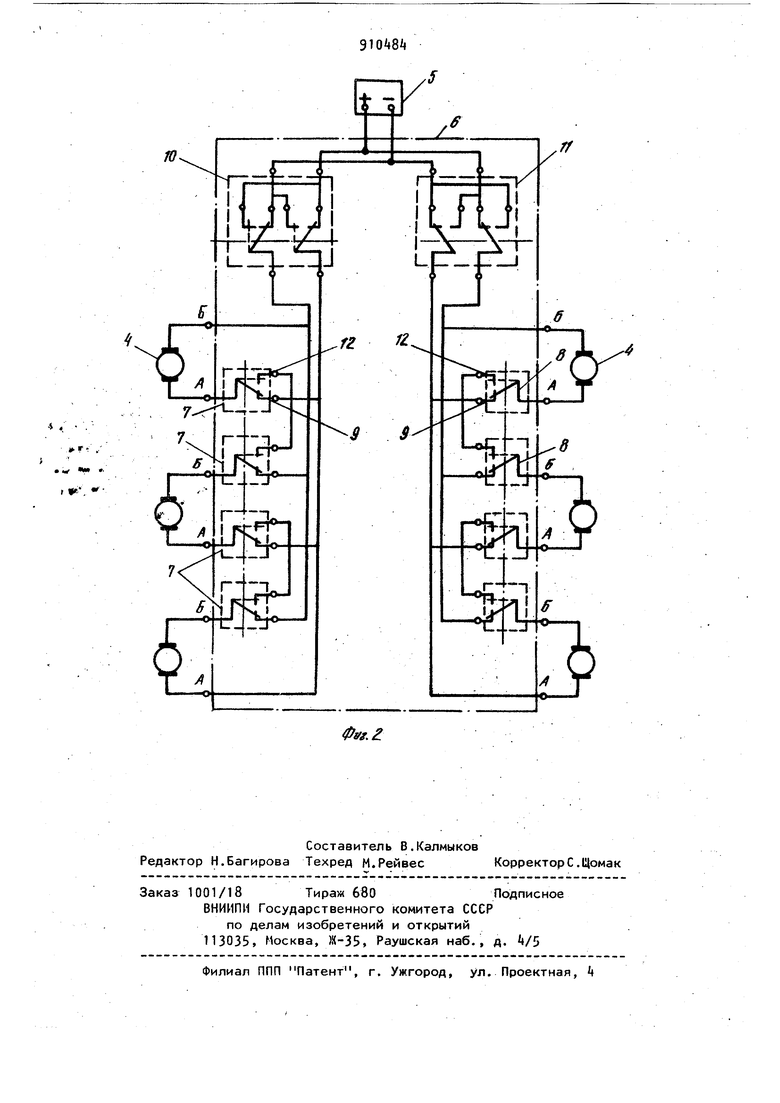
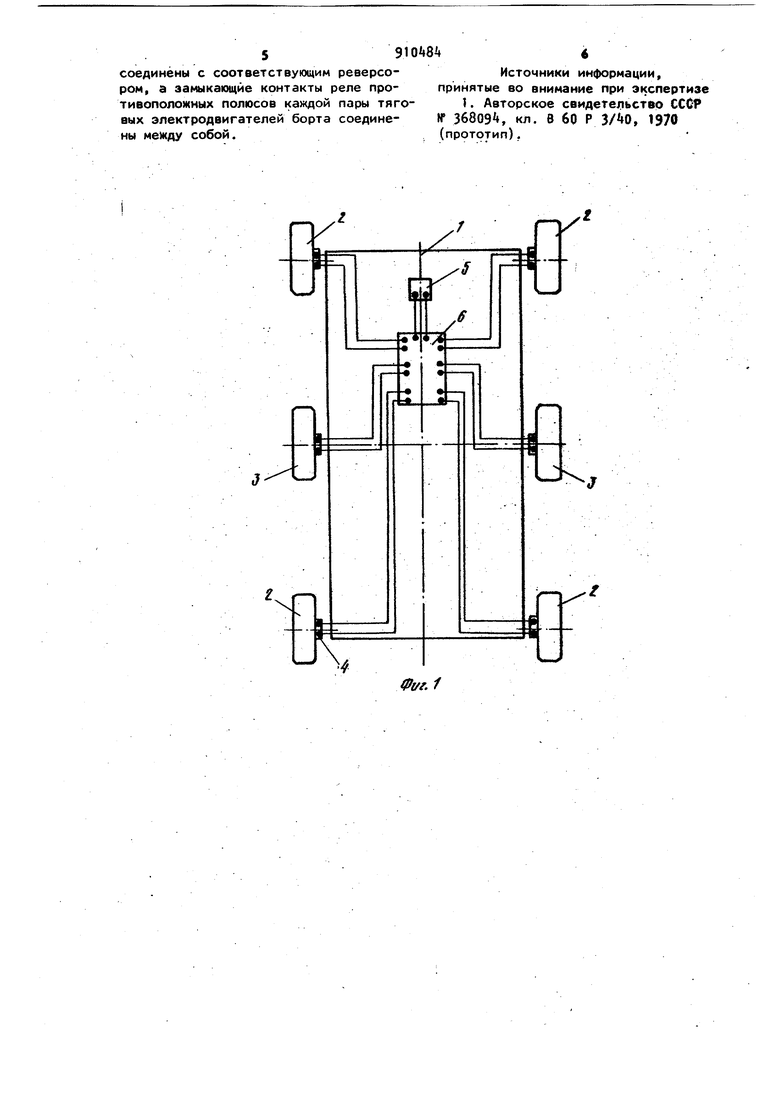
Изобретение относится к области машиностроения, а более конкретно к транспортным средствам с бортовым поворотом. Известно многоопорное транспортное средство с бортовым поворотом, содержащее опоры, укрепленные на раме транспортного средства, индивидуальные тяговые .электродвигатели пе ремещения опор, источник Питания и блок управления движением, включающий два реверсора соответствующих бортов, соединенных с источником питания и с тяговыми электродвигателями 1. Недостатком такого транспортного средства является то, что в силу осо бенностей взаимодействия колес с гру том в режиме бортового поворота при одинаковой скорости вращения всех ко лес борта, крайние колеса оказываются недогруженными, т.е. не использую ся их потенциальные тягово-сцепные свойства, при этом значительно увели чивается сопротивление повороту машины, что приводит к увеличению энергозатрат на поворот. Целью изобретения является уменьшение энергозатрат на поворот путем обеспечения возможности последовательного подключения тяговых электродвигателей каждого борта к источнику пи- тания в режиме поворота. Цель достигается тем, что блок управления движением снабжен двухконтактными реле, установленными на каждом выводе тяговых электродвигателей за исключением тяговых двигателей для перемещения крайних опор каиздого борта, на которых на разноименных выводах установлено по одному контактному реле, причем выводы тяговых электродвигателей подсоединены к ббщим вводам двухконтактных реле, размыкав щие контакты упомянутых реле соединены с соответствующим реверсором, д замыкающиеконтакты реле противопо- / ложных полюсов каждой пары тяговых 391о электродвигателей борта соединены меж ду собой. На фиг. 1 схематично дано транспортное средство; на фиг. 2 - принципиальная электрическая схема транспортного средства. Для примера рассмотрим шестиопорное транспортное средство (фиг. 1), содержащее раму 1 на которой укреплены колеса, крайнее 2 и средние 3 с установленными в них тяговыми электродвигателями k. Тя.говые электродвигатели подключаются к источнику питания 5 посредством блока управления 6.. Каждый тяговый электродвигатель Ц имеет два вывода полярности А и вы1зода полярности Б (фиг. 2). Все выводы двигателей, кроме вывода А для двигателей задних колес и вывода Б для двигателей передних колес, снабжены двухконтактными реле 7 и соединены с вводом 8 соответствующего реле 7-Размыкающие контакты 9 всех реле 7 посредством реверсора 10 левого борта и реверсора 11 правого борта соединя ются с соответствующим полюсом источника питания 5. Для обеих бортов замыкающий контакт 12 вывода Б заднего колеса соединены с -аналогичным KOHraK том вывода А среднего колеса, а контакт 12 вывода Б среднего колеса соединен электрически с аналогичным контактом вывода А переднего колеса. Выводы А..для задних колес и выводы Б для двигателей передних колес посредством реверсоров 10 и 11 могут подсоединяться к источнику питания 5. Реверсоры 10 и 11 состоят из пары двухконтактных переключателей и предназначены для изменения направления вращения двигателей каждого борта. Транспортное средство.работает следующим образом. При прямолинейном движении транспортного средства у всех реле 7 замкнуты размыкающие контакты 9- При этом все тяговые электродвигатели t оказываются подключенными параллельно к источнику питания 5. Направление пере движения (вращение колес) определяется положением контактов реверсоров ТО и 11. Для осуществления бортового поворота на месте, например, влево, во всех реле 7 производится замыкание замыкающих контактов 12 (на фиг. 2 показано пунктиром). При этом все двигатели каждого борта оказываются подключенными последовательно к источнику питания 5. Положение контактов реверсора 10 левого борта обратное (пунктиром на фиг. 2). Колеса бортов вращаются в противоположные стороны и осуществляется режим бортового поворота на месте. Для транспортных средств с числом опор больше шести возможно последовательное соединение и не всех тяговых двигателей колес, а группами, в состав которых входит одинаковое количество одноименных колес (в крайнем случае по два). Одноименными колесами называются те, -которые расположены симметрично относительно поперечной, оси машины. Экспериментальные исследования бортового поворота восьмиколесного шасси показали, что на сухом кварцевом песке, по сравнению с параллельным соединением, последовательное соединение тяговых двигателей колес попарно (одно среднее и одно крайнее) обеспечивает уменьшение удельных энергозатрат на поворот на . Формула изобретения Многоопорное транспортное средство с бортовым поворотом, содержащее опоры, укрепленные на раме транспортного средства, индивидуальные тяговые электродвигатели перемещения опор, источник .питания и блок управле Ния движением, включающий два реверсора соответствующих бортов, соединенных с источником питания с источником питания и с тяговыми электродвигателями, отличающееся тем, что, с целью уменьшения, энергозатрат на поворот путем обеспечения возможности последователь ного подключения тяговых электродвигателей каждого борта к источнику питания в режиме поворота, блок управления движением снабжен двухконтактными реле, установленными на каждом выводе тяГовыхэлектродвигателей, за исключением тяговых двигателей для перемещения крайних опор каждого борта, на которых на разноименных выводах установлено по одному двухконтактному реле, причем выводы тяговых электродвигателей подсоединены к общим вводам двухконтактных реле, размыкающие контакты упомянутых реле
591048 «
соединены с соответствующим реверсо-Источники информации,
ром, а замыкающие контакты реле про- принятые во внимание при экспертизе тивоположных полюсов каждой пары тяго- 1. Авторское свидетельство СССР вых электродвигателей борта соедине- W 36809, кл. 8 60 Р , 1970 ны между собой.(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоопорное транспортное средство с бортовым поворотом | 1983 |
|
SU1111926A1 |
| Полноприводное транспортное средство | 1986 |
|
SU1357296A1 |
| Способ поворота многоопорного транспортного средства на месте | 1976 |
|
SU562457A1 |
| Устройство для синхронного вращения валов электродвигателей постоянного тока | 1985 |
|
SU1305820A1 |
| Колесно-шагающий движитель | 1979 |
|
SU887340A2 |
| Устройство для регулирования силы тяги электродвигателей автономного транспортного средства | 1986 |
|
SU1400919A1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ, ПОЛОЖЕНИЕМ В ПРОСТРАНСТВЕ И НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, РЕАЛИЗУЮЩЕГО СХЕМУ БОРТОВОГО ПОВОРОТА И СНАБЖЕНННОГО НЕЗАВИСИМЫМИ ЭЛЕКТРОПРИВОДАМИ КОЛЕС | 2012 |
|
RU2517284C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794243C1 |
| Шагающее транспортное средство | 1974 |
|
SU527332A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО ТОРМОЖЕНИЯ БЕГУЩЕЙ ДОРОЖКИ | 1996 |
|
RU2116098C1 |