остзновку поезда на на1клонно1м пути в случае воз1Н)ик;но1вания авафийной ситуащдаи, что является обязательным требованием, предъявляемьш к парашютньгм устройствам.
Цель изобретения - новысить надежность устройства в работе.
Это достигается тем, что оно снабжено механизмом включения ловителя, выполнениьгм в виде авязвнной с Г1ид,родина1м,ичеоки:ми то:рMosaiMH шестеренчатой передачки с валом, несущим винтовую втулку с тягой, и 1карда«ным валом со столорным пальцем, установленным с возможностью взаимодействия с э-ксцентриковыМ ловителем.
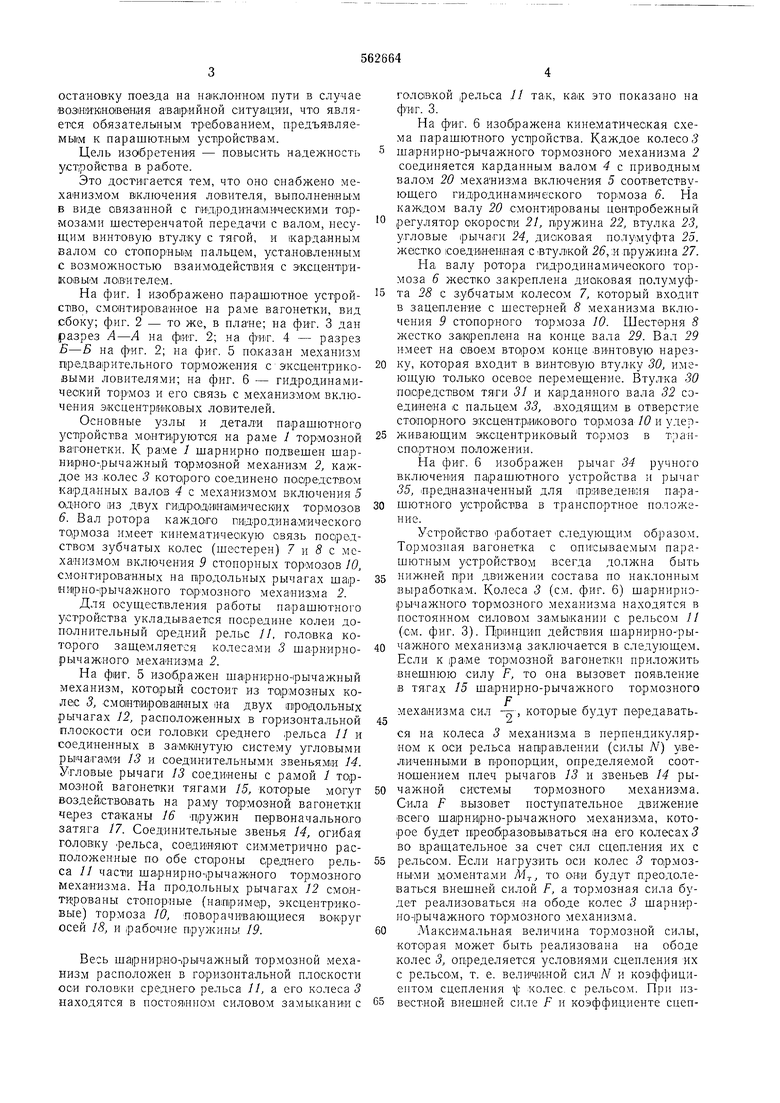
На фиг. 1 изображено парашютное устройство, смонтированное на раме вагонетки, вид сбоку; фиг. 2 - то же, в плане; на фиг. 3 дан разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 пО|Казан механизм П|редварительного торможения с эксцентриковыми ловителями; на фиг. 6 - гидродинамический тормоз и его связь с механнзмом включения Э№сцентри1ковых ловителей.
Основные узлы и детали параш отного устройства монтируются на раме / тормозной вагонетки. К раме 1 шарнирно подвешен шарнирно-рычажный тормозной механизм 2, каждое из колес 3 которого соединено пооредством карданных валО|В 4 с механизмом включения 5 одного из Д1вух гидроа1иеа1мичесмих тормозов 6. Вал ротора каждого гадродинамического тормоза имеет кинематическую связь посрадствоМ зубчатых колес (шестерен) 7 ц 8 с мсха«измо-м включения 9 стопорных тормозов 10, смонтированных на продольных рычагах шар1ни|рно-рычажного торМозного механизма 2.
Для осундествления работы парашютного устройства укладывается посредине колеи дополнительный аредний рельс //, головка которого защемляется колесами 3 шарнирнорычажного механизма 2.
На фиг. 5 изображен шарнирно-рычажный механизм, который состоит из тормозных колес 3, смо1НТ(Ир01ван1Ных двух тродольных рычагах /2, расположенных в горизонтальной плоскости оси головаси среднего рельса // и соединенных в замкнутую систему угловыми рьрчагами 13 и соединительными звеньями М. Угловые рычаги 13 соединены с рамой / тормозной вагонетки тягами 15, которые могут воздействовать на раму тормозной вагонетки чфез ста1каны J6 пружин пе рвоначального затяга 17. Соединительные звенья 14, огибая голов ку рельса, соединяют симметрично расположенные по обе стороны среднего рельса и части шарнирно-|рычажного тормозного механизма. На продольных рычагах 12 смонти;рованы стопорные {на пример, эксцентриковые) тормоза 10, поворачивающиеся вокруг осей 18, и рабочие пружины 19.
Весь шарнирно-рьгчажный тормозной механизм расположен в горизонтальной плоскости оси голов1ки среднего рельса 11, а его колеса 3 находятся в постоя нном силовом замыкании с
головкой рельса // так, KaiK это показано на фиг. 3.
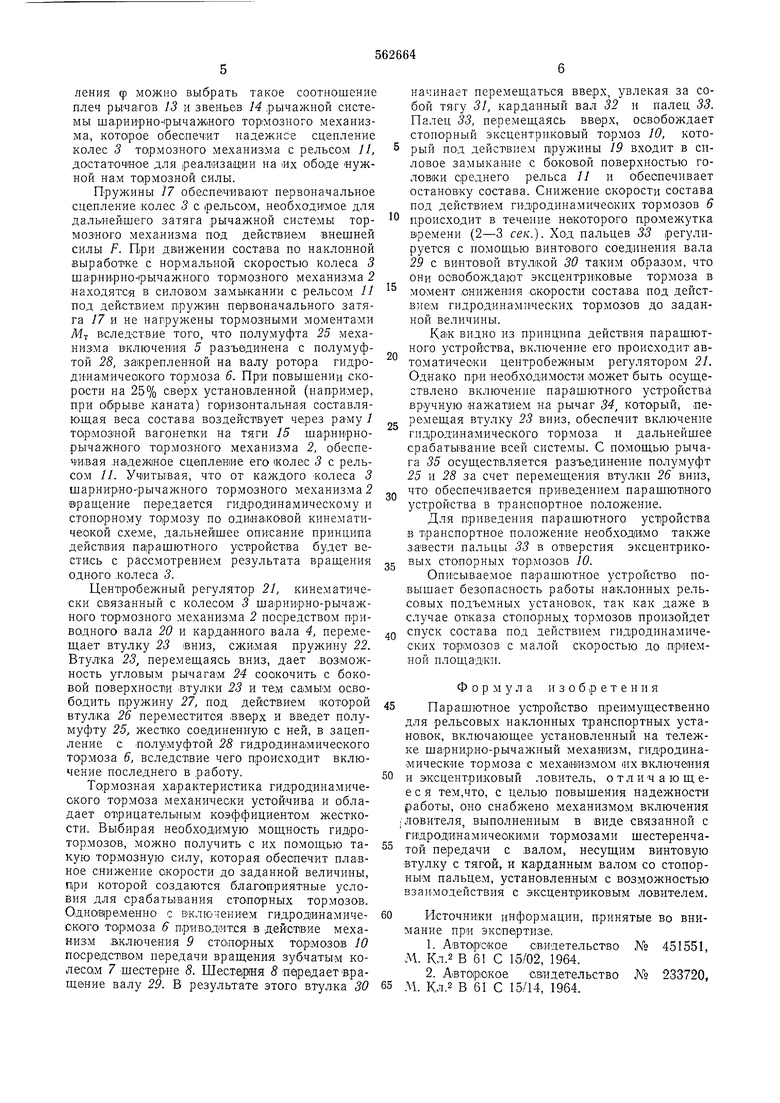
На фиг. 6 изображена кинематическая схема парашютного уст1ройства. Каждое колесо 5
шарнирно-рычажного тормозного механизма 2 соединяется карданным валом 4 с приводным валом 20 механизма включения 5 соответствующего гидродинами1ческого тормоза 6. На каждом валу 20 смонтированы центробежный
регулятор скорости 21, пружина 22, втулка 23, угловые рычаги 24, дисковая полумуфта 25, жестко соединеннаЯ с втулкой 25, :и пружина 27. На валу ротора гидродинамического тормоза 6 жестко закреплена дисковая полумуфта 28 с зубчатым колесом 7, который в.ходит в зацепление с шестерней 8 механизма включения 9 стопорного тормоза W. Шестерня 8 жестко заиреплена на конце вала 29. Вал 29 имеет на своем втором конце винтовую нарезку, которая входит в винтовую втулку 30, имеющую только осевое перемещение. Втулка 30 поюредством тяги 31 и карданного вала 32 соединена с пальцем 33, входящим в отверстие стонорного эксцантрижового тор.моза /О и удерживающим эксцентриковый тормоз в транспортном положении.
На фиг. 6 изображен рычаг 34 ручного включения парашютного устройства и рычаг 35, 1Пред1назначенный для приведения парашютного устройства в транспортное положение.
Устройство работает следующим образом. Тормоз 1ая вагонетка с описываемым парашютным устройством всегда должна быть
нижней при движении состава по наклонным выработкам. Колеса 3 (см. фиг. 6) шарнирнорьгчажного тормозного механизма находятся в постоянно силовом замыкании с рельсом // (см. фиг. 3). Нринцин действия шарнирно-рычажного механизма заключается в следуюшем. Если к раме тормозной вагонетки приложить внешнюю силу F, то она вызовет появление в тягах /5 шарнирно-рычажного тормозного
, которые будут передаватьмеха1низма сил
ся на колеса 3 механизма в перпендикулярном к оси рельса направлении (силы Л) увеличенными в пропорции, определяемой соотношением плеч рычагов 13 и звеньев 14 рычажной системы тормозного механизма. Сила F вызовет поступательное движение всего шарнирно-рычажного механизма, которое будет преобразовываться иа его колесах. во вращательное за счет сил сцепления их с
рельсом. Если нагрузить оси колес 3 тормозными мОМента.ми М., то они будут преодолеваться внешней силой F, а тормозная сила будет реализоваться на ободе колес 3 шарнирно-рычажного тормозного механизма.
Максимальная величина тормозной силы, которая может быть реализована на ободе колес 3, определяется условиями сцепления их с рельсом, т. е. велича-гной сил Л и коэффициентом сцепления ij; колес, с рельсом. При известной внешней силе F и коэффициенте сцепления ф можно выбрать такое соотношение плеч рыча.гов 13 и звеньев 14 рычажной системы ша,рнирно-|рычажного тормозного механизма, KOTOipoe обеонеч:ит надежнее сценление колес 3 тормозного механизма с рельсо-м 11, достаточное для реализации на .их ободе «ужной нам тармозной силы. Пружины 17 обеспечивают нервоначальное сцепление колес 3 с рельсом, необходимое для дальнейшего затяга рычажной системы тормозного механизма под действием внешней силы F. При движении состава по наклонной выработке с нормальной скоростью колеса 5 шарйирно-рычажного тормозного механизма 2 находятся в силовом замьгкании с рельсом 11 под действием пружин пе|рвоначального затяга 17 и не нагружены тор мозными моментами Л1т вследствие того, что полумуфта 25 механизма включения 5 разъединена с полумуфтой 28, закрепленной на валу ротора гидродИНамичеакого тормоза 6. ПрИ повышении скорости на 25% сверх установленной (например, при обрыве каната) горизонтальная составляюш,ая веса состава воздействует через раму 1 Т01рмозной вагонетки на тяги 15 шарнирнорычажного тормозного механизма 2, обеспечивая надежное сцепление его колес 3 с рельсом //. Учитывая, что от каждого колеса 3 шарнирно-рычажного тормозного механизма 2 ераш,ение передается гидродинамическому и стопорному тормозу по одинаковой кинематической схеме, дальнейшее описание принципа действия парашютного устройства будет вестись с рассмотрением результата врапхення одно-го колеса 3. Центробежный регулятор 21, кинематически связанный с колесом 5 шарнирно-рычажного тормозного механизма 2 посредством приводного вала 20 и карданного вала 4, перемещает втулку 23 вниз, сжЕмая пружину 22. Втулка 23, перемещаясь вниз, дает .возможность угловым рычагам 24 соскочить с боковой поверхности .втулки 23 и тем самым освободить пружину 27, под действием которой 26 переместится .вверх и введет полумуфту 25, жестко соединенную с ней, в зацепление с полумуфтой 28 гидродинамического тормоза 6, вследствие чего происходит включение последнего в работу. Тормозная характеристика гидродинамического тормоза механически устойчива и обладает отрицательным коэффициентом жесткости. Выбирая необходимую мощность гидротормозов, можно получить с их помощью такую тормозную силу, которая обеспечит плавное снижение скорости до заданной величины, цри которой создаются благоприятные условия для срабатывания стопорных тормозов. Одно В|ременно с в-ключением гидродинамичеокого тор1моза 6 привадится в дейСТвие механизм включения 9 стопорных тормозов 10 посрбдством передачи вращения зубчатым колесам 7 щестерле 5. Шестерня 5 передает вращение валу 29. В результате этого втулка 30 начинает перемещаться вверх, увлекая за собой тягу 31, карданный вал 32 и палец 33. Палец 33, перемещаясь вверх, освобождает стопорный эксцентриковый тормоз 10, который под действием пружины 19 входит в силовое замыкание с боковой поверхностью головки среднего рельса 11 и обеспечивает остановку состава. Снижение скорости состава под действием гидродинамических тормозов 6 происходит в течение некоторого промежутка времени (2-3 сек.). Ход пальцев 33 регулируется с помощью винтового соединения вала 29 с винтовой втул1кой 30 таким образом, что они освобождают эксцентриковые тормоза в момент снижения скорости состава под действием гидродинамических тормозов до заданной величины. Как видно из принципа действия паращютного устройства, включение его происходит автоматически центробежным регулятором 21. Однако при нео бходимости 1может быть осуществлено включение парашютного устройства вручную нажатием н,а рычаг 34, котарый, перемещая втулку 23 вниз, обеспечит включение гидродина мического тормоза и дальнейшее срабатывание всей системы. С помощью рычага 35 осуществляется разъединение полумуфт 25 и 28 за счет перемещения втулки 26 вниз, что обеспечивается приведением парашютного устройства в транспортное положение. Для приведения паращютного устройства в транспортное положение необходимо также завести пальцы 33 в отверстия эксцентриковых стопорных тор.мозов 10. Описываемое парашютное устройство повышает безопасность работы наклонных рельсовых подъемных установок, так как даже в случае отказа стопорных тормозов произойдет спуск состава под действием гидродинамических тормозов с малой скоростью до приемной плош,адки. Формула изобретен и я Парашютное устройство преимущественно для рельсовых наклонных транспортных установок, включающее установленный на тележке шарнирно-рычажный механизм, гидродинамические тормоза с механизмом «ix включения и эксцентриковый ловитель, отличающееся тем,что, с целью повыщения надежности работы, оно снабжено механизмом включения ловителя, выполненным в виде связанной с гидродинамичеокшми тормозами шестеренчатой передачи с валом, несущим винтовую тулку с тягой, и карданным валом со стопорным пальцем, установленным с возможностью взаи.модействия с эксцент|риковым ловителем. Источники информации, принятые во внимание при экспертизе. 1.Авторское свидетельство ЛЬ 451551, Л1. Кл.2 В 61 С 15/02, 1964. 2.ABTOipcKoe свидетельство № 233720, М. Кл.2 В 61 С 15/14, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВАРИЙНОЕ ТОРМОЗНОЕ УСТРОЙСТВО ТРАНСПОРТНОЙ ТЕЛЕЖКИ | 2003 |
|
RU2234433C1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Вагонетка для перевозки людей по наклонным выработкам | 1949 |
|
SU80880A1 |
| Устройство для управления тормозами рельсового транспортного средства | 1978 |
|
SU706274A1 |
| ТЯГОВОЕ УСТРОЙСТВО | 1970 |
|
SU285953A1 |
| Несимметричное реверсивное тяговое устройство | 1970 |
|
SU522980A1 |
| Захват рельсовый антиопрокидыватель с тормозом | 2023 |
|
RU2836927C1 |
| Устройство для перемещения вагонеток | 1987 |
|
SU1442446A1 |
| Стояночный тормоз транспортного средства | 1990 |
|
SU1792851A1 |
| Тяговое устройство | 1973 |
|
SU478757A1 |


.г
А-А
5-6
ХХ/Х/// //xx/x////V///X/x////x
.J
фигА
.е
