(54) СТЕНД ДЛЯ ИСПЫТАНИЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ
которые помещаются двигатели 6, перемещаемые через ряд позиций.
В устройстве предусмотрены приспособления для направления каждого двигателя 6 к испытательному стенду 1, когда он достигнет соответсшующей позиции, и для возвращения его обратно к конвейеру 4 после завершения испытания. Этими приспособлениями являются роликовый подъемник с приводом 8, обеспечивающий возвратнопоступательное движение и небольшой подъем пластины 5 и находящегося на ней двигателя 6, над уровнем конвейера 4 и отклоняющая пластина 9, связанная приводом 10 для горизонтального перемещения пластины 5 вместе с установленным на ней двигателем 6 с подъемником 7 к испытательному стенду 1, а затем обратно к подъемтжу 7 для замены двигателя.
Подъемник 11, расположенный ниже испытательного стенда 1, предназначен для подъема пластины 5 конвейера 4, когда отклоняюндая пластина 9 перемещается из своего левого положения в правое (фиг. 2). В соответствующий момент подъемник 11 опускается так, что пластина 5 может быть временно вьшедена из-под испытьшаемого двигателя. Затем подъемник 11 поднимается так, что пластина 5 . принимает двигатель после испытания, после чего отклоняющая пластина 9 возвращает двигатель и пластину 5 к конвейеру 4. Подъемник 11 приводится в движение совершаюидам возвратно-поступательное перемещение приводом 12.
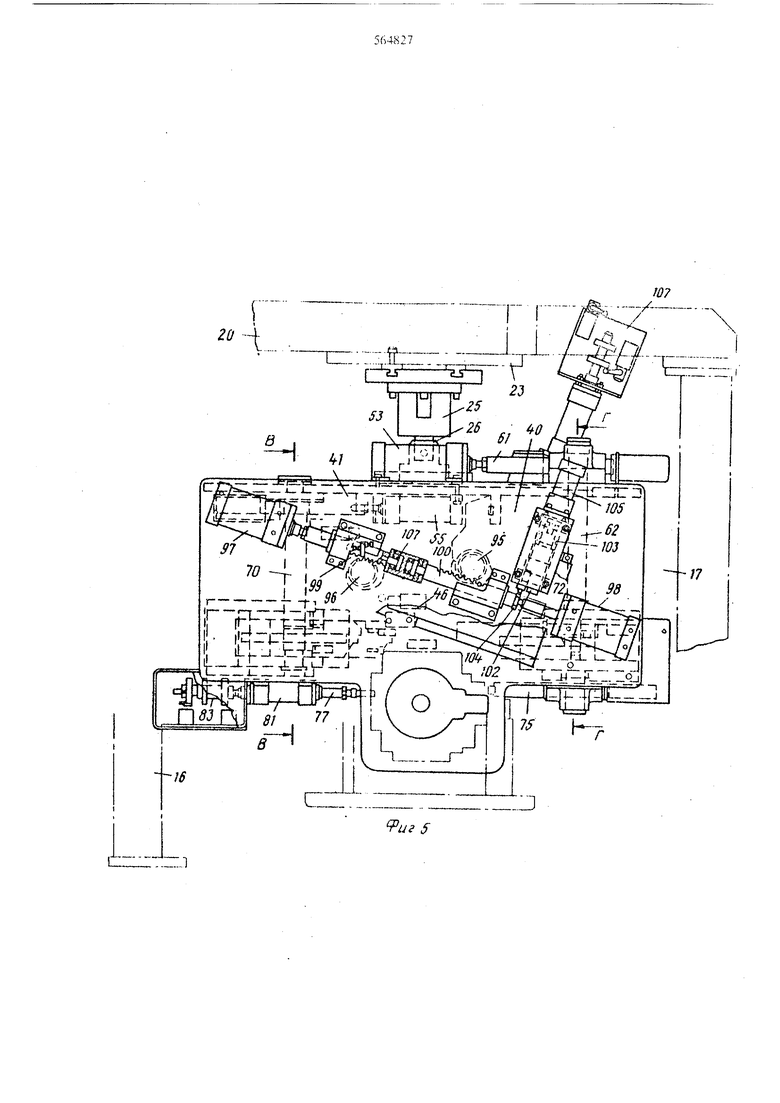
Испытательный стенд 1 состоит из пространственной фермы 13, имеющей пару передних колонок 14 и 15 и пару задних колонок 16 и 17, опирающихся на выступ 18 подставки 2. Балка 19 опирается на колонки 14 и 15, а балка 20 опирается на колонки 16 и 17. Поперечные балки 21 и 22 располагаются между балками 19 и 20 и подперживают пластину 23. Рама 24, вьшолнепная в виде перевернутого V, подвеоюна на пластине 23 с помощью верхнего подщипнякового мехашгзма 25 и нижнего ПОД1Ш1ПНИКОВОГО механизма 26 (фиг. 4) пр1ием, подшипниковьш MexaifflSM 25 делает возмож1Ш1м качание рамы на вертикальной оси по отношению к ферме 13, а мехаш1зм 26 на горизонтальной оси.
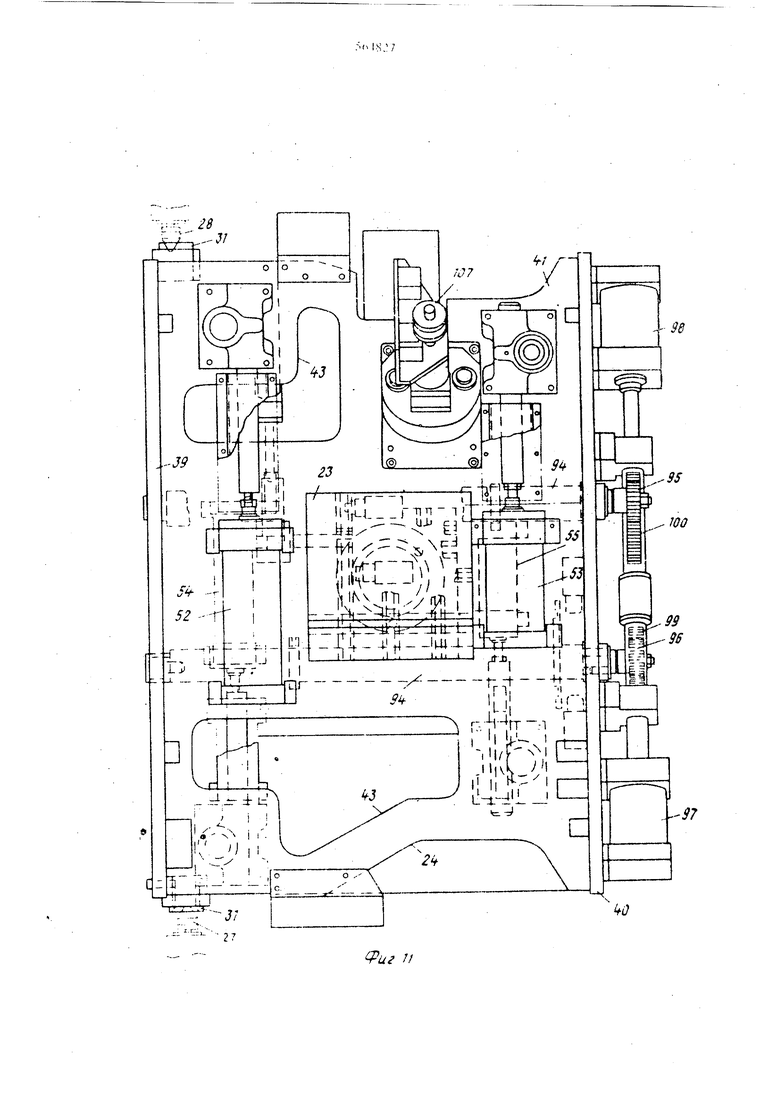
Предусмотрены также средсчва для стопорения рамы 24 по отношешю к ферме 13. Эти средства (фиг. 3 и 11) состоят из пары конических сцепляющих щтифтов 27 и 28, установленных с возмож- костью скольжения на пропюоположных сторонах фермы и приводимых в действие обеспеч1тающ1(ми возвратно-поступатеньпое двгюсение приводами 29 и 30, соответственно между пози11,иями втяпшания я стопорения. В позишги стопорения ляифты 27 и 28 входят в гжзда соответсгаенно 31 и 32 на раме 24.,
Пара защитных дверей 33 и 34 (фиг. 1 и 3) установлены на ферме 13 с возмож1гостью скольжен ш гори-.Ю(пально по нлпргшляющил 35 я 36, ajOTветсвс П)О, установленным на колонках 14 и 15. Лвери открьшанпся и з.якрьшкются приводами 37
и 38, совершающим врзврашо-поступательное движение и установленными на ферме 13.
Точная форма внутренней части рамы 24, служащей для приема двигателя 6 будет зависеть от формы испьггьшаемого двигателя. Конструкция должна быть такой, чтобы двигатель мог войти в раму. Предпочтительно, чтобы рама 13 имела каркас, изготовленный из. апюми1шевых пластин или пластин подобного материала, чтобы рама бьша легкой насколько это возможно, но сохраняла необходимую жесткость и являлась хорошей подставкой для различных штырей, валов, осей и другого оборудования. Например, рама 24 может состоять из задней 39 и передней 40 пластин, верхней и нижней соединительных пластин 41 и 42. Плзл стины могут иметь отверстия 43, облагчаюпдие конструкцию (фиг. 11) и кроме, того, для поддержания различных перемещающихся деталей могут быть щ)едусмотрены дополнительные конструктивные элементы. Верхняя Ш1ас1ина41 с возможностью регулирования прикреплена к нижней поверхности нижнего подшипникового механизма 26 посредством элемента 44 (фиг. 4).
В задней пластине 39 имеется вырез 45 неправильной формы с тем, чтобы двигатель входил в раму и вьшодился из нее отклоняющей пластиной 9. В передней пластине 40 могут быть также вьшолнены вьфезы для правильной установки выступающих частей двигателя. Кроме того на ней находится стопор 46 для точного размещения двигателя в направлении коленчатого вала в , когда двигатель находится в раме 24. Для безопасности во время работы внутри рамы установлен кожух махового колеса 47 (фиг. 3).
Устройство для сцепления двигателя с рамой (фиг. 5-11) состоит из двух противоположных пар зажимов или кареток 48 и 49. .Каждая пара зажимов входит в зацешкние с одной стороны двигателя и, в частности, эти зажимы входят в зацепление с кош трольными калибровочными выступами 50 и 51 (на фиг. 8 частично обозначегш шгрих-пуиктирными линиями), образоват1ыми на двигателе и используемыми при обработке блока на станках. Задняя составная часть пары кареток 48 приводится в действие совершающим возвратно-поступательное движерше приводом 52, а передняя часть кареток48 приводом 53, причем .зти приводы устазговлены над верхней пластиной 41. Задняя часть пары кареток 49 приводится в действие приводом 54. а передняя - приводом 55, причем эти приводы помещаются под верхней пластиной 41.
Устройство, соединяющее привод 52с частью кареток 48, содержит (фиг. 10) рейку 56, приводимую в действие приводом и входящую в зацепление с зубьями 57 на верхнем конце вертикального вала 58, установленного на раме с возможностью враидепия. Зубья 59 на нижнем конце этого вала входят в зацсплешш с рейкой 60, услаиовлещюй на каретке 48. Таким же образом п 51шод 53 приводит в действие свою часть кярогок48 MCIJO:) piiiuy 6),
вертикальньй вал 62, и 63,ycTaHOBJieffliyroHa раые (фиг. 7).
Устройство, соединяющее привод 54 с его кареткой 49, содержит (фиг. 9) рейку 64, подсоединенную к приводу 54 и входящую в зацепление с зубьями 65 верхнего конца вертикального вала 66, установленного на раме с возможностью вращения. Нижняя часть этого вала имеет зубья 67, входящие в зацепление с рейкой 68 на части кареток 49. Привод 55 аналогично приводит в действие свою часть кареток 49 при помощи рейки 69 (фиг. 6), поворачивая вертикальный вал 70, который действует на рейку 71, установлегшую на каретке. Целесообразно, чтобы приводы 52, 53, 54 и 55 первоначально приводились в действие под сравнительно низким давлением для перемеще 1ия их соответсвенных кареток в позицию запирания. Каретка 48 передвинется в положение, показанное на фщ. 5 пунктирной линией 72, и ,ет удерживаться в этом положении сравнительно высоким давлением, в то время как каретка 49 будет продвигаться дальше под высоким давлением, обеспечивая надежную фиксацию двигателя 6 в раме 24. Передняя часть кареток 49 (фиг. 8) имеет боковую поверхность 73, которая прижмет с силой двигатель к стопору 46. Двигатель 6, таким образом, будет надежно зафиксирован в точной конгрольной позиции по отношению к раме с соблюдением параллельности и правильных углов к оси коленчатого вала.
Валы 58 и 62 также приводят в действие пары дополнительных кареток 74 и 75, которые выдерживают нижнюю часть двигателя на позивди. Каретки 74 и 75 установлены соосно с коленчатым валом и располагаются напротив пары чувствительных ияьфей 76 и 77 датчика, измеряющего перемещения двигателя. Штыри подвижно укреплены ниже рамы. Каретки 74 и 75 приводятся в действие удлиненными зубьями 78 и 79 у нижних концов валов 58 и 62, соответстветю. Эти зубья входят в зацепление с зубчатой рейкой на каретках 74 и 75 (фиг. 7 и 10). Как каретки 48 и 49, каретки 74 и 75 упираются в контрольные поверхности на двигателе и ре1улируются приводами 52 и 53, осуществляющими возвратао-постхлтательное движение олновремешю с движею1ем верхней каретки 48. 1о есть, сначала они будут перемещаться вперед под действием сравнительно низкого давления, а затем - под действием более высокого давлепия. Таким образом, они будут вьщержшзагься в установлешых KoirTpojibHbix иозтиях.
111тыри 76 и 77 датчиков установлены с возможностыо возвратно -поступательно движения от приводов 80 и 81, соответственно, а на задием конце имеют измеряющие виорациш д;|тмики колебаний 82 и 83 оПымиого типа, работающие на И ;ерционном ripnifniiiie (фиг. 5 и 8) опьршо кривую частоты и напряжении дагипса rapiipyior и величина исбаланса Ov.i.ci зависеть от cooiношения между пока:1ателями. и:1мереи11ы ч1н дат1и;:ами и угловым положением :niiio но отшчиеник к изложению верхней мертвой точки маховика двигателя (ВМТ). 8 четырехцилиндровых двигателях, например, ВМТ относится к первому Щ1линдру. При испытании ВМТ будет измеряться обратным бесконтактным датчиком 84, вст 1оенным в каретку 48 (фиг. 8). Штыри 76 и 77 датчиков располагакттся спереди и сзади двигателя 6 так, чтобы могло быть осуществлено измерение отклонения от направления движения, и чтобы они были расположены в
ПЛОСКОСТИ и под прямым утлом к геометрической оси коленчатого вала. Концевые выключатели 8 и 86 предназначены для перемещеш1я датчиков в npmviOM и обратном нaпpaвлe шяx. В предлагаемом случае после того, как двигатель 6 зафиксирован на
своей конечной позиции для проведения испытаний внутри рамы, пласткна 5, на которой помещен двигатель б, будет совершать обратное движение с помоидью подммника 11 с тем, чтобы дать возможность штырям 76 и 77 выдвинуться вперед по направлению к испытываемому двигателю.
Возможна конструкция, в которой зтих щтырей нет и датчики установлены прямо на раме 24, так, чтобы можно было измерять горизонтальную вибрацию, перпендикулярную оси даигатедя.
В предлагаемом стенде предусмотрены два подъемных кртока 87 и 88 (фиг. 8) для подъема по отнощенмю к раме двигателя 6 в его окончательную позицию после того, как каретки 48, 49, 74 и 75 вошли в кошакт с двигателем. Эти крюки поднимают двигатель на небольшую высоту с помощью скоб 89 и 90 на двигателе (на фиг. 8 показаны тонкой линией). ДЕШгатель поднимается до тех пор, пока поверхности на кошрольных калибровочных вь ст}иах 50 и 51 блока двт1гателя точно не соединятся с поверхностями 91 и 92 кареток 48 и 49.
Подьемнье крюки 87 и 88 установлены на паре иара.плельиык горизшггальных врапшющихся валов 93 я 94, погч{е1иаю1цихся внутри рамы. Эти валы распола а отоя Глежду п.тшстинами 39 и 40 рамы,
выходят за пре.целы иластипы 40 и имеют на своих выстуна/гацмх соответственно щестерни 95 и 96. Вйльг ус1аиовле1И11 с возможностью врап1ения между первым иоложеиием, в котором крюки находя гея в своем нижнем или отведенном положс И11, 1; вторым положением, в котором крюки 87 ооворач11г а;отся против часовой criieiiKM, а крюки 88 - по часовой стрелке с тем, чтобы войти в заи.еи.гсиие с ио;1,ъел-. скобами двигателя.
Для пр п едепия в дейсгвие валов 03 и 94
имеюгся гриво, 97 и 18, обеспечиваюище вози1атио--иосту11птелы 0е двиясение и уетановлепные вне п.пасгин. 40. Привод 97 воздействует на рейку 99, в.ходящун) д зацепление с Bcpxneii частью HiecTCpни 96, T0i;,a icaK iipH)io;i 9S перемещает peiiKy 100,
входя в зацепление е игестерисй 95 в нижней ее чаеги. i результате, когла Н 1иводы начнут осуществтгять nepcMCMienue внуг)ь и влево (4)И1. 5) валы будут BpantaiiCSi. : ас1авл 1и пoдьe н ыc к-рмки цепЛЯП) лви1;;1..п и но.чпимагь его, а iijui («братом
дии;ие 111И ICIMOKH бу:;уг (Лвелены назад. Между
рейками установлены пружины 01 для того, чтобы после того как контрольные выступы дв1}гателя войдут в контакт с поверхностями 91 и 92 указанных кареток, они жестко удерживались в правильном положении.
Чтобы обеспечить надежную работу подъемных крюков 87 и 88, а двигатель не смог упасть в случае резкого уменьшения давления воздуха в приводах 97 и 98, имеется зап1фающий элеМеш 102. Этот элемент постоянно поджат пружиной 103 в направлении положения, в котором он не позволяет гайке 104, прилегандцей к рейке 100, перемацаться вправо в результате чего он удерживает подъемные крюки IOT перемещения в обратном направлении.
Элемент 102 связан с поршнем воздушного цилиндра 105,Который непосредственно подсоединен к источнику сжатого воздуха, снабжающего сжатым воздухом приводы и .98. Как только зти1 два привода вновь будут снабжаться воздух хом, элеменг 102 выйдет из положения, не дооусканвцего перемещения рейки, но при падении давления этот элемент снова бпо:сир(шать гайку 104.
Устройство для иэ«4ерения давлеш{Я масла приводится в. движение приводом 106, обеашч ающим его возвратно-поступательное движение (фиг. 8). Приводной распределительный мехаШ1зм 107 предусмотрен для установки распределителя (фиг. 5011)..
При испытании двигателя 6 в режиме хояодаой обкатки, то естькогда двигатель приводится в действие от внешнего истоганка знфгии, использзоот гидравлический мотор 108 (фиг. 12-15),который может быть выпота ен с поршнем, насаженным на шток не под прямым углом. Бго устанавливают при помощи подве ски109 на передней плите 40 рамы 24. Целесоофазно, чтобы мотор 108 был относительно небольшим, легким и приводился в действие большим и более тяжелым гидравлическим насосом 110 племенного объема (фиг. 2), установленным на пощ рядом с испытательным стендом 1.
Гидросташческая система, включаюи ая в себя MOTq 108 и насос 110, является нагрузочным устройством и представляет собой замкнутьш гидравлический контур, незамк1утую систему управления с фиксирсшанным механическим остановом на насосе переменного объема для того, чтобы получить воспроизводимую точность измерений при установке выбранной скорости, когда производят испытания двигателя. Получение повторяющейся точности измерений может быть достигнуто и без фиксированных остановов, при помощи замкнутой системы
При использовании замкнутой системы управления, двигатель 6: может быть подвергнут испытаниям под нагрузкой с использованием гидравлического мотора 108 в качестве насоса и насоса ПО в качестве мотора. ;
Рабочий объем насоса ПО следует изменять с тем, чтобы создавать различные натрузки или инерционные условия, действующие на испытьшаемый двигатель, как, например, нагрузки, возникающие
при движегош автомобиля в гору или с горьь
Выходной вал 111 мотора 108 связан с коленчатым валом двигателя ступицей и шкивами 112 (фиг. 12). Гильза 113 установлена на вал 111 при помощи шпонки и несет на себе эластичную муфту,
образующую гибкую передачу между двигателем и нагрузочным устройством.
Муфта установлена с возможностью |скользкёния на гильзе и соединяется с ней посредством; шпонки 114 и имеет металлический вщгтренний
;элеме1{т 115, металлический внешний элемент 116 и проА«ежуточный эластичный элемент 117, связанные вместе. Элемент 117 служит и в качестве изолирующего демпфера разъеданяя приводимый в действие; злемент 116 с элементами, а также для
уменьшения отношения паразитного веса к весу самого двигателя.
Выступающий конец зжмента 116 имеет коническую повфхность 118 для осуществления центрирования по Ьтноешнию к ступице коленчатого вала.
Пара выступов 119 на поверхности 118 входит в пару пазов на ступице коленчатого вала. П1льза 113 входит в зацепление с коленчатым валом под действием сжитс пружины 120, расположенной междувыступающим концом 121 эластичной муфты
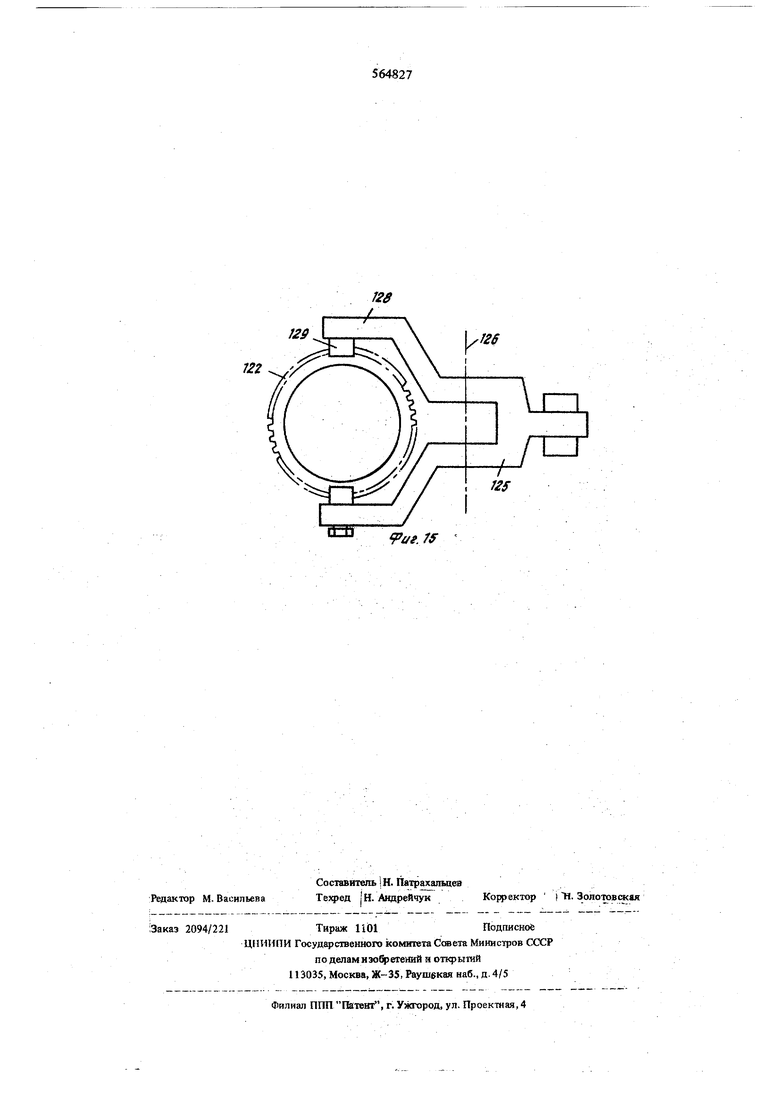
и валом 111. Зубчатьга элемент 122 установлен на элементе 116, а датчик 123, смежный с этим элемен-г том, используется для измерения скорости вращения.. .
Для отвода муфты служит мотор 124 (фиг. 14), осуществляннций возвратно-поступательное перемещение, и приводит в действие вилкообразный рычаг 125, посаженный на ось 126, установленную на кожухе 127. Вилка 128 (фиг. 15) рычага 125
несет ролики 129, которые располагаются на противоположных сторонах элемента 116. Когда мотф 124 осуществляет движение вперед, ролики 129 входят в зацепление с зубчатым элементом 122, отводя гильзу в положение, показанное на фиг. 12
штрих-пунктирной линией.
При работе, принимая за исходное положение то, при котором двигатель 6 встает напротив стен-; да 1, подъемник 7 поднимает двигатель и плиту, на котфой он установлен, с конвейера 4, отклоняющая пластина 9 потянет двигатель с плитой рамы. В это время рама будет зажата внутри фермы 13 штифтами 28 и иметь соосность с фермой 13.
Защитные двери 33 и 34 закрыты, каретки 48
и 49 выдвигаются вперед и входят в зацепление с , двигателем б, причем задняя каретка 49 прижимает двигатель к переднему стопору 46. Сбоку двигатель удерживается в правильном положении этими каретками, а также каретками 74 и 75, которые
выдвигаются вместе с каретками 48.
Затем подъемные крюки 87 и 88 поднимают испытьшаемый двигатель, точно располагая его посредством опорных поверхностей 91 и 92 на каретках48 и 49. В результате этого, двигатель будет жестко установлен в раме в продольном, боковом и вертикальном направлениях. Подъемник 11 опускае плиту 5 на расстояние, достаточное дал того, чтобы штьфи76 и 77 датчика доставали до испытъюаемого двигателя.
В это время приводной мотор 108 соедине1Г с коленчатьпл валом путем приведения в действие мотора 124, осуществляющего возвратно-поступательное движение, что позволяет пружине 120 перемещать эластичную муфту влево {фиг. 12), Мотор 108 работает на очень малой скорости до тех пар, пока выступы 119 муфты не войдут в выеМ ки 130 в ступице коленчатого вала; а затем вращает вал двигателя на холостом ходу. При этом измеряют давление масла, а приводной распределительный механизм должен быть подсоединен к испытьшаемол-у двигателю. При малой скороста вращения может быть измерека амплитуда перемещения с тем, чтобы определить наличие чрезмерного шума.
Когда рама связана с фермой двигатель может вращаться с относительно большой скоростью (например, порядка 1800 об/мин) с помощью мотора 108.
Затем рама вьгеодится из зацепления путем осуществления обратного хода стопорных штифтов 28. Динамический дисбаланс испытьшаемого двигателя измеряют датчиками колебания, вьйорно настроенными на частоту, соответствующую числу оборотов в минуту путем определения величины и угла смещения движения испытьюаемого двигателя по отношению к ВМТ. Датчики колебания также калибруются- на шум по диапазо частот при данной скорости.
Двойная щарнирная опора д/ш рамы 24 дает возможность получать постояннь е к точные данные по динамическому дисбалансу. Наличие этих шарнирных средств позволяет отсоединить раму и испытьшаемый двигатель от объемной фермы. Предпочтительно, чтобы ось подшипникового механи ма 25 проходила через цегар тяжести двигателя, а ось меха1шзма 26 параллельно оси коленчатого вала.
Необходимо, чтобы вал двигателя 6 вращался с высокой скоростью, достаточной для появления динамического движения. Подвеска, состоящая из испытьшаемого двигателя и рамы будет иметь две
10
частоты собствеш{ых свободных колебаний. Поскольку с момеггга начала враще1шя скорость будет увеличиваться, испытьшаемый двигатель и рама будут двигаться вместе в направлении, перпендикулярном оси вращения колешитого вала, если у этого двигателя статический дисбаланс. В этом случае вращение будет происходить вокруг оси механизма 26, а датчик коле&1ний будет находиться в фазе с синхро1шым совместным 1перемещением назад и вперед. Когда скорость возрастет настолько, что станет больше этого значения, тогда двигатель (при наличии динамического дисбаланса) вместе с рамой начнет поворачиваться вокруг центра тяжести этой системы, то есть вокруг оси
механизма 25 с датчиками колебания, измеряющими амплитуду этого перемещения движением, направле1ше которого смещено на 180° по фазе.
При вращении двигателя на большой скорости может быть проверен момент зажигания с использованием и без него. Может быть проверено также и давление масла.
Затем раму 24 вновь скрепляют с фермой сцепляющими штифтами 28, а скорость вращения коленчатого вала понижают до нуля мотором 108.
Штифты 76 и 77 отходят назад, пластина 5 поднимается, а другие механизмы, такие как датчик ВМТ, измерители давления масла и распределительный механизм разъединяют. Муфта также отводится в обратное положение действием мотора 124,
осуществлякнцего возвратно-пос1)шательное дви-, жение. Подъемные крюки 87 и 88 опускают приводами 97 и 98, а каретки 48,49, 74,75 отходят назад в результате работы приводов 52, 53, 54 и 55. Двери 33 и 34 открьшаются и двигатель с плитсй, на
которой он находился, воэвршдается к главному конвейеру отклоняющей пластиной 9.
Формула изобретения
Стенд для испытаний двигателя внутреннего сгорания, содержащий нагрузочное устройство, связанное с коленчатым валом двигателя через гибкую передачу н раму со средствами для размещения и закрепления двигателя, отличающийся тем, что, с целью повыщения скорости и точности Иопьь таний, рама вьщолнена в форме перевернутого V и свободно подвешена в пространственной ферме, а внутри рамы расположены устройства для регистрации перемещения двигателя при его работе. п иг $ га
ff
fus.g
SB
fB
Г8
itJl
Tt-°nt
Tf
98
/J 52 -Т -- 111- i-j L j - c- r Ш J . :
иг // 1- -t - -K Г1i; I: Mf I I - i Iria-i Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания двигателя внутреннегоСгОРАНия | 1975 |
|
SU850027A3 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| ГРАВИТАЦИОННЫЙ ДВИГАТЕЛЬ | 1992 |
|
RU2024784C1 |
| СИСТЕМА ДЛЯ ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2657827C2 |
| Скороморозильный аппарат для упакованных пищевых продуктов на поддонах | 1985 |
|
SU1330427A1 |
| УСТАНОВКА ДЛЯ СВАРКИ ТЕПЛООБМЕННИКОВ С ЛЕПЕСТКОВЫМИ ПОВЕРХНОСТЯМИ НАГРЕВА | 1994 |
|
RU2041040C1 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ОБСЛУЖИВАНИЯ ФАСАДОВ ЗДАНИЙ | 2015 |
|
RU2579376C1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| Устройство к прессу для подачи кареток с резаками в рабочую зону пресса и выталкивания из них изделий и отходов | 1978 |
|
SU856835A1 |
| Приспособление для автоматического пуска в ход и остановки подъемника для кирпича-сырца | 1928 |
|
SU16111A1 |









8ид Вид 9и8. /
564827
т сриг. Л
k
J2S
I
J2S
t/f.7y
