Изобретение относится к холодильной технике, а именно к устройствам для замораживания пищевых продуктов, уложен1ных на поддоны, в потоке охлаж- денного воздуха, и может быть применено в отраслях пищевой промышленности, связанных с замораживанием фасованных пищевых продуктов.
Целью изобретения является повышение надежности в работе.
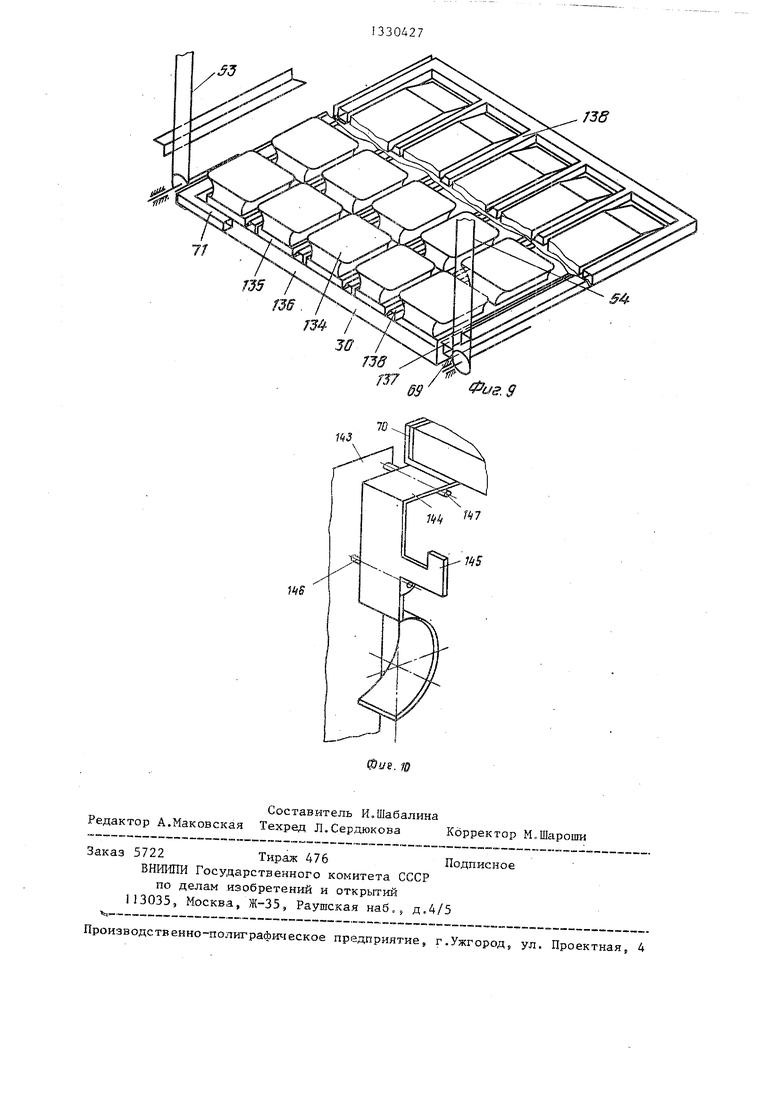
На фиг.1 схематично показан скороморозильный аппарат, общий вид; на фиг.2 - кинематическая схема; на фиг.З - загрузочно-разгрузочное устройство; на фиг.4 - перегрузоное устройство; на фиг,5 - откидной толкатель перегрузочного устройства; на фиг.6 - устройство механизма загрузки (разгрузки ; на фиг.7 - то же, поперечный разрез; на фиг.8 - устройство лифтов и установка поддонов на направляющие лифтов;-на фиг.9 - устройство копира и установка на него перфорированного поддона и упаковок с продуктом; на фиг.10 - фиксатор разгрузочного лифта.
Скороморозильньй аппарат для упа- ковйнных пищевых продуктов содержит теплоизолированную камеру 1, размещенные в ней вертикальные поднимаю- щий 2 и опускающий 3 лифты, нижнее .загрузочнр-разгрузочно и верхнее перегрузочное устройство 4 и 5, расположенные в торцовых частях, камеры воздухоохладители 6 и 7. В теплоизолированной камере размещены редукторы 8 - 11, связанные с валами 12 - 15; редукторы 16 и 17, связанные с валами 18 и 19 и приводными валами 20 и 21, шестернями 22 и 23. Около загрузочного 24 и разгрузочного 25 окон аппарата установлены загрузочное 26 и разгрузочное 27 устройства.
и тормозных 47, 48 муфт и валов 49 50.Соединение редукторов 43 и 44 с валами 12 и 18 через теплоизолиров
с ную камеру 1 производится посредст вом катушек 51 и 52.
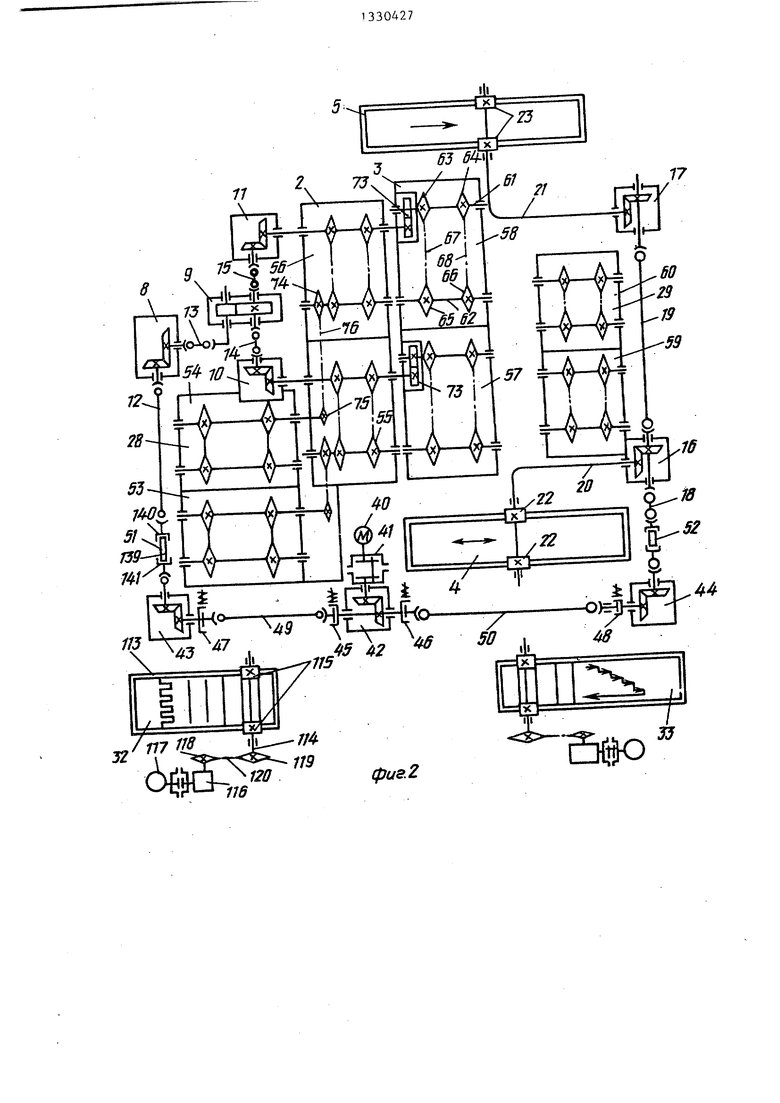
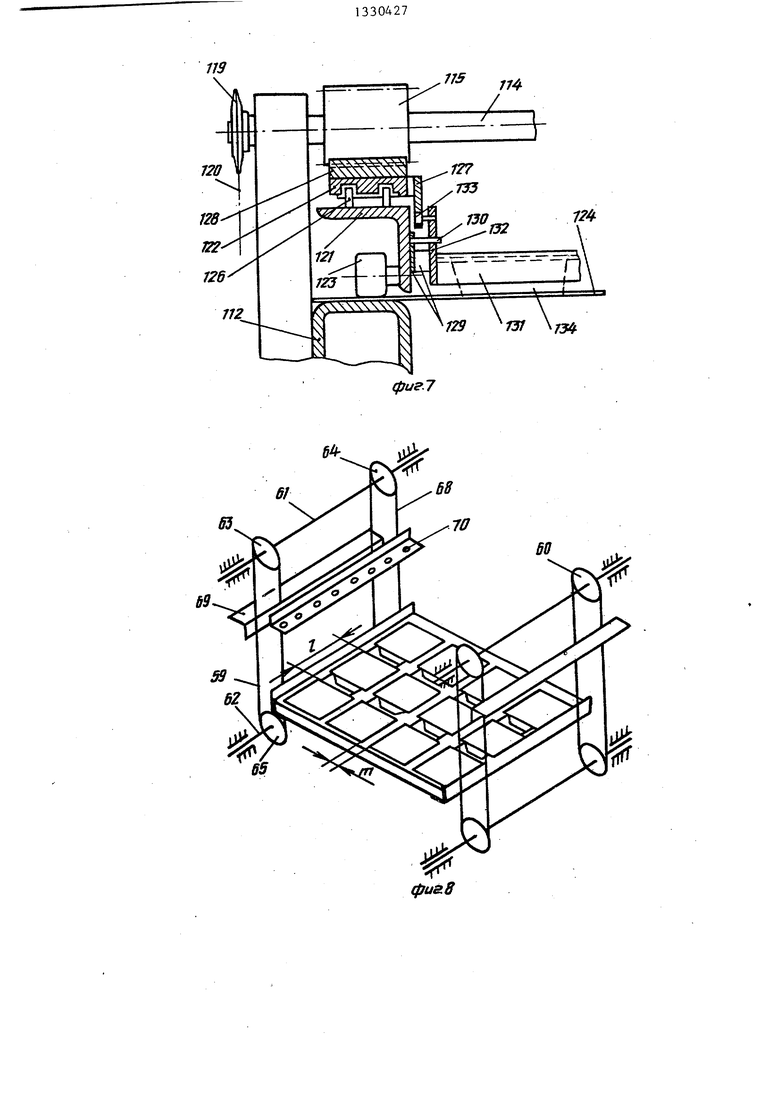
Каждый из четырех лифтов состав лен (фиг.2,8) двумя паралельными в тикальными цепными транспортерами
Ш 53 и 54 - загрузочньй, 55 - 56 - п нимающий 57 и 58 - опускающий, 59 и 60 - разгрузочный. Каждый трансп тер состоит из двух валов; верхнег 6 и нижнего 62, на которых устано
15 лены звездочки: 63 и 64 - на верхн валу, 65 и 66 - на нижнем, через к торые перекинуты цепи: 67 - через звездочки 63 и 65; 68 - через звез дочки 64 и 66. На каждой паре цепе
20 через определенньй интервал крепят ся горизонтальные направляющие 69 несущие поверхности которых снабже ны винтами 70 (фиг.8), головки которых размещены на несущей поверх25 ности направляющих и вьтолнены из материала с низкими адгезионными свойствами, например фторопласта; каждьй перфорированный поддон 71 (фиг. 9) устанавливают на две напра
30 ляющие 69 смежных транспортеров. Кроме того, на транспортерах поднимающего 2 и опускающего 3 лифтов между направляющими 69 и цепями . крепятся пластины 72 (фиг.1), уста
3g новка которых позволяет использовать ветви транспортеров как непро ваемые перегородки.
Лифты 2 и 3 связаны между собой кинематически через редукторы 73,
40 лифт 28 с лифтом 2 - через звездо ки 74, 75 и цепи 76 (фиг.2).
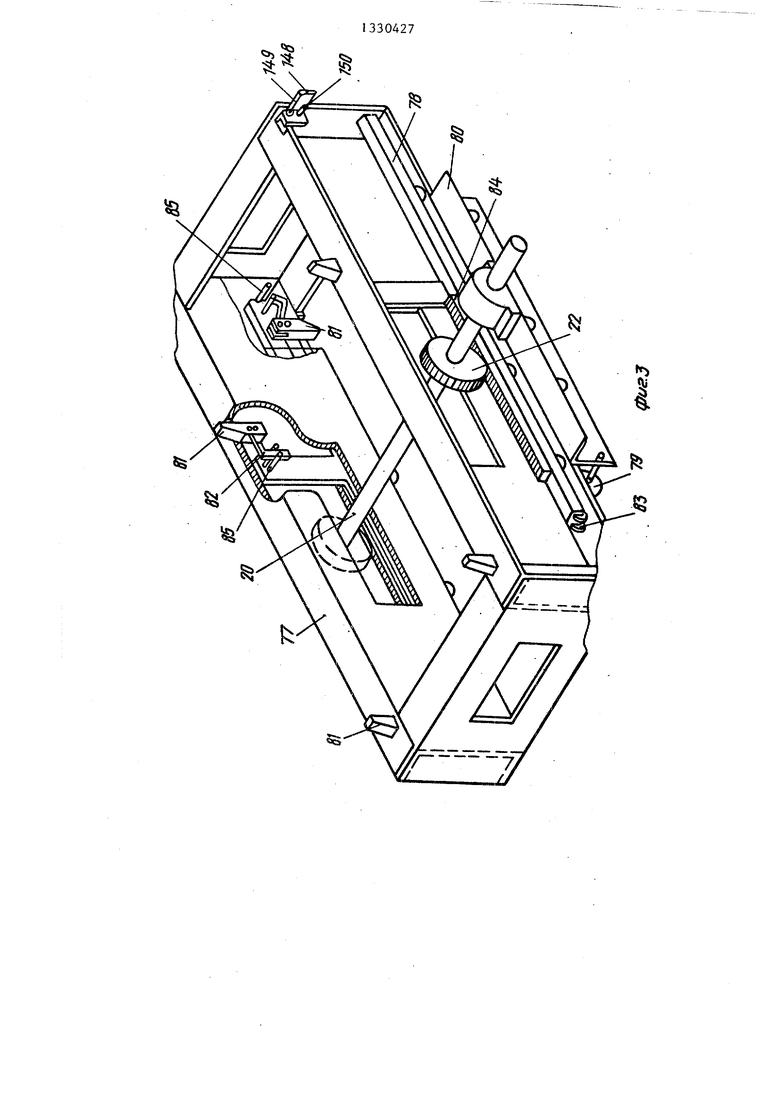
Загрузочно-разгрузочное устройство 4 (фиг.З) состоит из рамы 77 кареток 78. Рама 77 установлена на
загрузочный 28 и разгрузочный 29 лиф- 45 роликах 79 в направляющих 80. На ты и копиры 30 и.31, которые распо- верхней и нижней сторонах рамы 77
ложены в теплоизолированной камере 1, а механизмы 32 и 33 загрузки и разгрузки расположены вне камеры 1, Загрузочное 24 и разгрузочное 25 ок - на снабжены крьппками 34; и 35, уста новленными на шарнирах 36 и 37.
Механизм 38 привода ( фиг.1) лифтов, вынесенньй за пределы теплоизолированной камеры 1 и собранный на раме 39, состоит из мотор-редуктора 40 с предохранительной муфтой 41 , редукторов 42 - 44, приводных 45, 46
и тормозных 47, 48 муфт и валов 49 и 50.Соединение редукторов 43 и 44 с валами 12 и 18 через теплоизолированную камеру 1 производится посредством катушек 51 и 52.
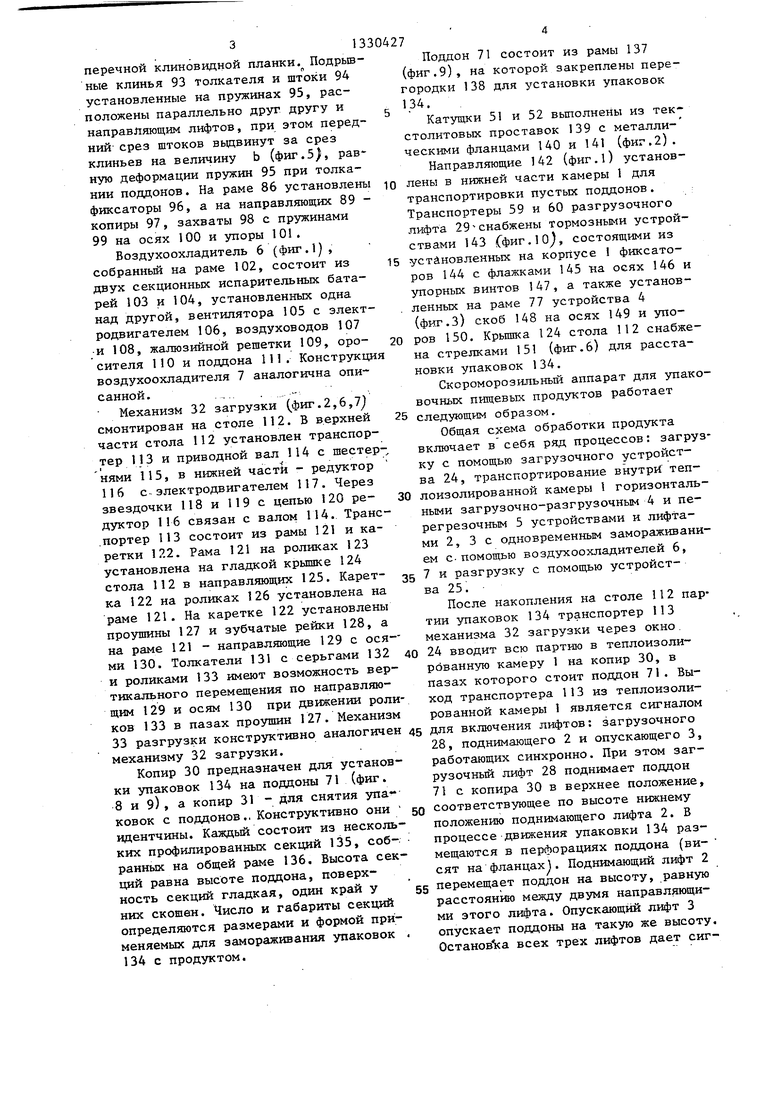
Каждый из четырех лифтов составлен (фиг.2,8) двумя паралельными вертикальными цепными транспортерами:
53 и 54 - загрузочньй, 55 - 56 - под- нимающий 57 и 58 - опускающий, 59 и 60 - разгрузочный. Каждый транспортер состоит из двух валов; верхнего 6 и нижнего 62, на которых установлены звездочки: 63 и 64 - на верхнем валу, 65 и 66 - на нижнем, через которые перекинуты цепи: 67 - через звездочки 63 и 65; 68 - через звездочки 64 и 66. На каждой паре цепей
через определенньй интервал крепятся горизонтальные направляющие 69, , несущие поверхности которых снабжены винтами 70 (фиг.8), головки которых размещены на несущей поверхности направляющих и вьтолнены из материала с низкими адгезионными свойствами, например фторопласта; каждьй перфорированный поддон 71 (фиг. 9) устанавливают на две направ-.
ляющие 69 смежных транспортеров. Кроме того, на транспортерах поднимающего 2 и опускающего 3 лифтов между направляющими 69 и цепями . крепятся пластины 72 (фиг.1), установка которых позволяет использовать ветви транспортеров как непродуваемые перегородки.
Лифты 2 и 3 связаны между собой кинематически через редукторы 73, а
лифт 28 с лифтом 2 - через звездочки 74, 75 и цепи 76 (фиг.2).
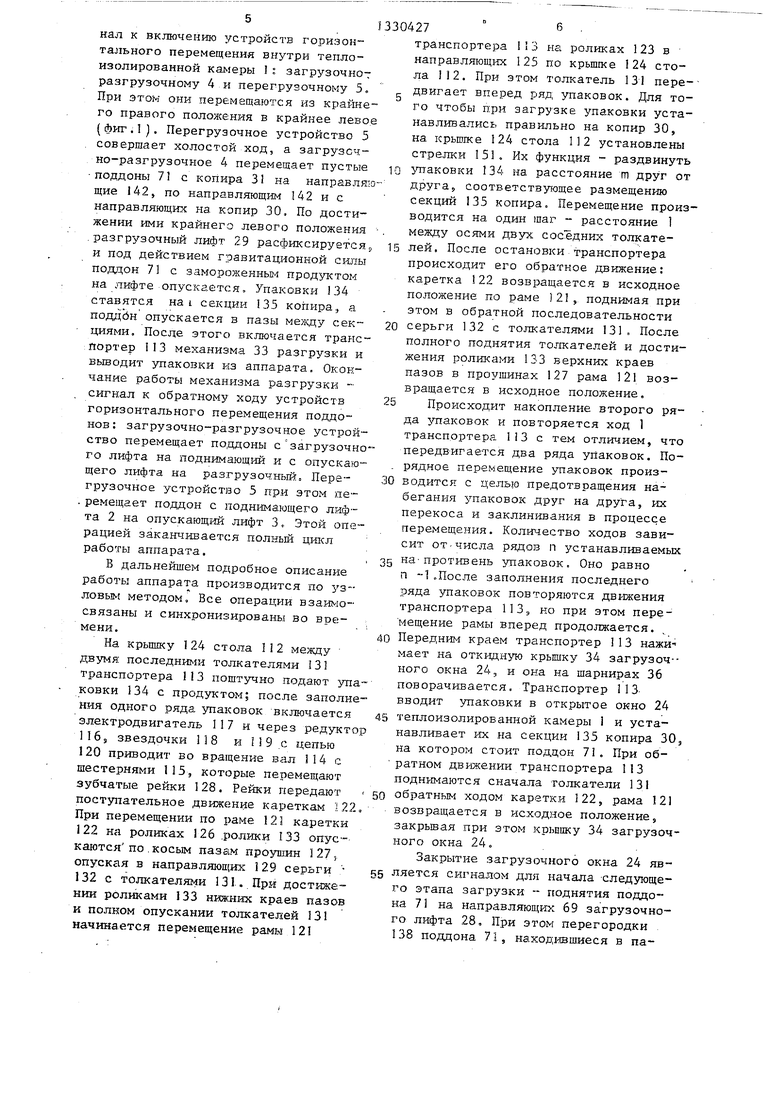
Загрузочно-разгрузочное устройство 4 (фиг.З) состоит из рамы 77 и кареток 78. Рама 77 установлена на
установлены толкатели 81 с рычагами 82. Каретки 78 перемещаются по раме 77 на роликах 83. На каретках 78
крепятся зубчатые рейки 84 и пальцы 85. Толкатели 81 установлены с возможностью вертикального перемещения .
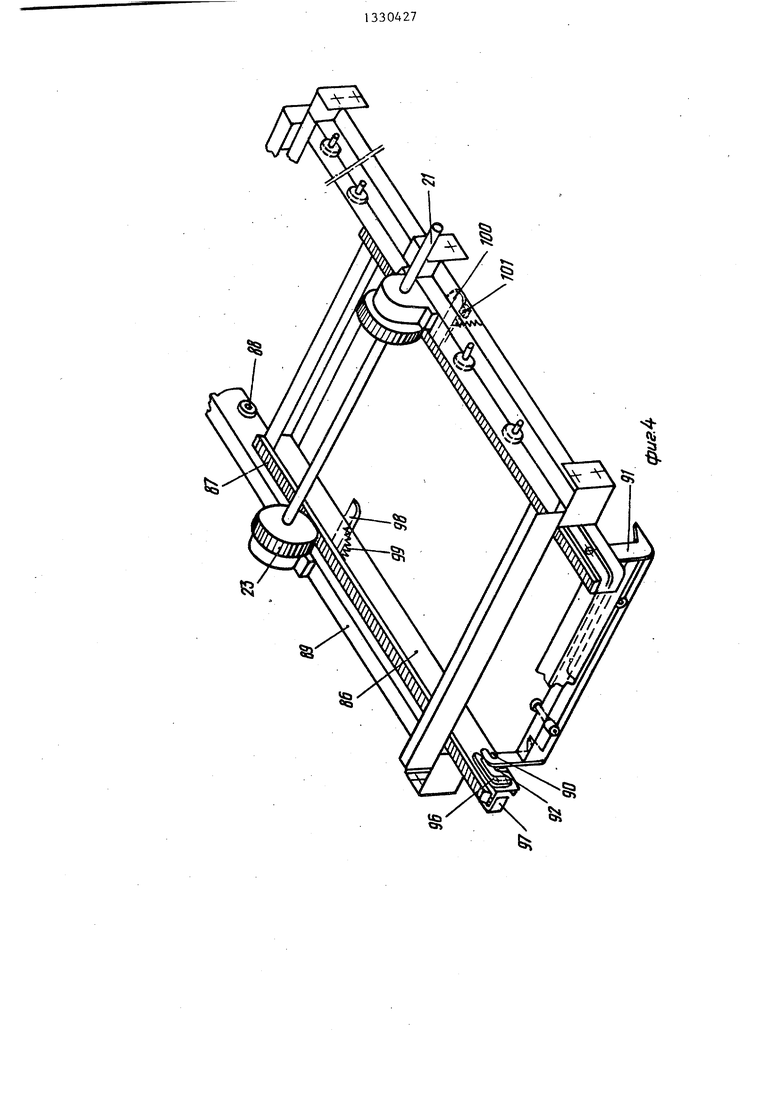
Перегрузочный транспортер 5 (фиг.
4 и 5) содержит раму 86 с зубчатыми рейками 87, установленную на роликах 88 в направляющих 89. На осях 90 к раме подвешен толкатель 91 с упорами 92, выполненный в виде по
313
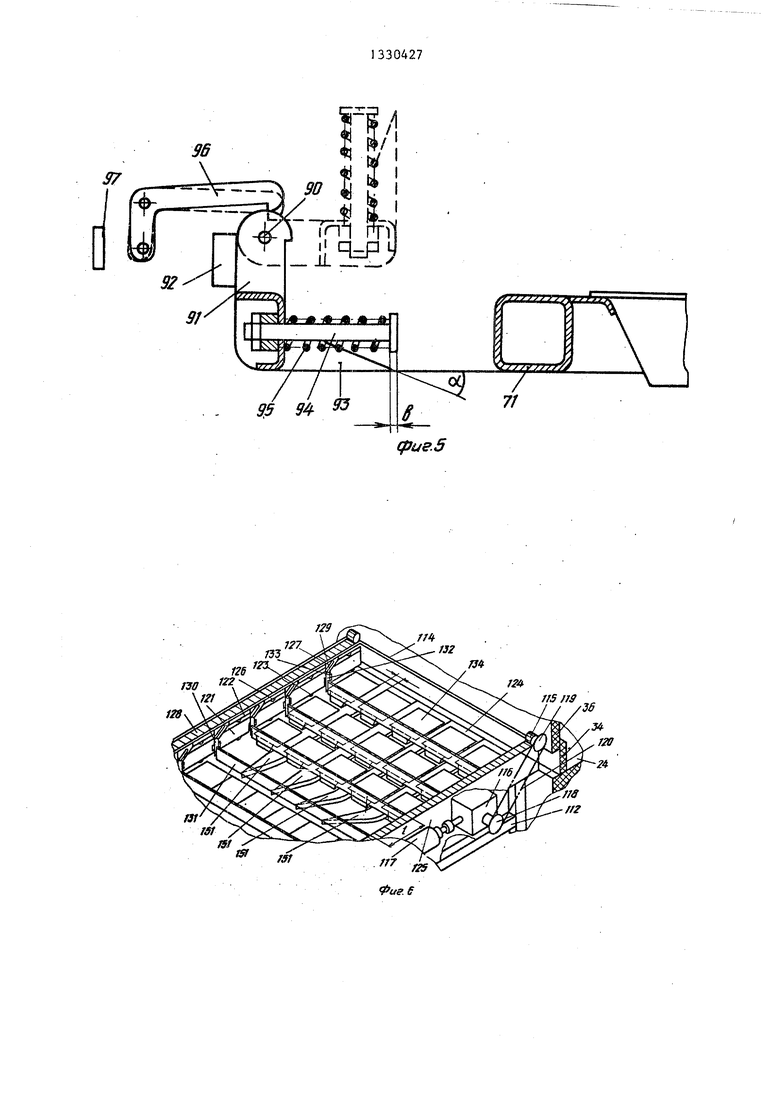
перечной клиновидной планки, Подрью- ные клинья 93 толкателя и штоки 94 установленные на пружинах 95, расположены параллельно друг другу и направляющим лифтов, при этом передний срез штоков выдвинут за срез клиньев на величину b (фиг.5), равную деформации пружин 95 при толкании поддонов. На раме 86 установлены фиксаторы 96, а на направляющих 89 - копиры 97, захваты 98 с пружинами 99 на осях 100 и упоры 101.
Воздухоохладитель 6 (фиг.1), собранный на раме 102, состоит из двух секционных испарительных батарей 103 и 104, установленных одна над другой, вентилятора 105 с электродвигателем 106, воздуховодов 107 и 108, жалюзийной решетки 109, оросителя 110 и поддона 111. Конструкци воздухоохладителя 7 аналогична описанной.
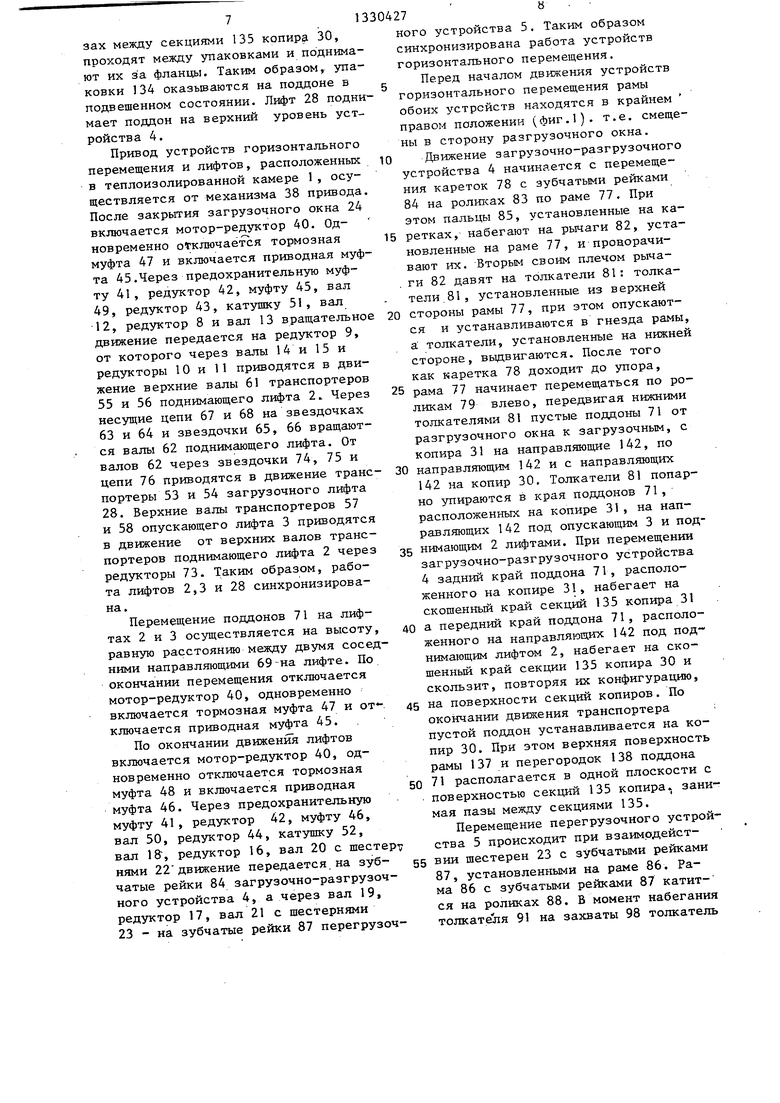
Механизм 32 загрузки (фиг.2,6,7 смонтирован на столе 112. В верхней части стола 112 установлен транспортер 113 и приводной вал 114 с тестер нями 115, в нижней части - редуктор 116 с-электродвигателем 117. Через звездочки 118 и 119 с цепью 120 редуктор 116 связан с валом 114. Транс .портер 113 состоит из рамы 121 и каретки 1.2. Рама 121 на роликах 123 установлена на гладкой крышке 124 стола 112 в направляющих 125. Каретка 122 на роликах 126 установлена на раме 121. На каретке 122 установлены проушины 127 и зубчатые рейки 128, а на раме 121 - направляющие 129 с осями 130. Толкатели 131 с серьгами 132 и роликами 133 имеют возможность вертикального перемещения по направляющим 129 и осям 130 при движении рол
После накопления на столе 112 пар тии упаковок 134 транспортер 113 механизма 32 загрузки через окно. 24 вводит всю партию в теплоизолированную камеру 1 на копир 30, в пазах которого стоит поддон 71. Выход транспортера 113 из теплоизолированной камеры 1 является сигналом
КОВ 133 в пазах проушин 127. Механизм 33 разгрузки конструктивно аналогичен 45 Для включения лифтов: загрузочного механизму 32 загрузки. . 28, поднимающего 2 и опускающего 3,
работающих синхронно. При этом загрузочный лифт 28 поднимает поддон 71 с копира 30 в верхнее положение, 50 соответствующее по высоте нижнему положению поднимающего лифта 2. В процессе движения упаковки 134 размещаются в перфорациях поддона (висят на фланцах ). Поднимающий лифт 2 55 перемещает поддон на высоту, равную расстоянию между двумя направляющими этого лифта. Опускающий лифт 3 опускает поддоны на такую же высоту
Копир 30 предназначен для установки упаковок 134 на поддоны 71 (фиг. 8 и 9), а копир 31 - для снятия упаковок с поддонов., Конструктивно они идентчины. Каждый состоит из нескольких профилированных секций 135, собранных на общей раме 136. Высота секций равна высоте поддона, поверхность секций гладкая, один край у них скошен. Число и габариты секций определяются размерами и формой применяемых для замораживания упаковок . 134 с продуктом.
OcTaHOB ka всех трех лифтов дает сиг0
5
0
Поддон 71 состоит из рамы 137 (фиг.9), на которой закреплены перегородки 138 для установки упаковок 134.
Катущки 51 и 52 выполнены из текстолитовых проставок 139 с металлическими фланцами 140 и 141 (фиг.2).
Направляющие 142 (фиг.1) установлены в нижней части камеры 1 для транспортировки пустых поддонов. Транспортеры 59 и 60 разгрузочного лифта 29 снабжены тормозными устройствами 143 (Сфиг . 1 0 , состоящими из установленных на корпусе 1 фиксаторов 144 с флажками 145 на осях 146 и упорных винтов 147, а также установленных на раме 77 устройства 4 (фиг.З) скоб 148 на осях 149 и упоров 150. Крышка 124 стола 112 снабжена стрелками 151 (фиг.б) для расстановки упаковок 134.
Скороморозильный аппарат для упаковочных пищевых продуктов работает 5 следующим образом.
Общая схема обработки продукта включает в себя ряд процессов; загрузку с помощью загрузочного устройства 24, транспортирование внутри теп- 0 лоизолированной камеры 1 горизонтальными загрузочно-разгрузочным 4 и пе- регрезочным 5 устройствами и лифтами 2, 3 с одновременным замораживанием с. помощью воздухоохладителей 6, 7 и разгрузку с помощью устройства 25 .
После накопления на столе 112 партии упаковок 134 транспортер 113 механизма 32 загрузки через окно. 24 вводит всю партию в теплоизолированную камеру 1 на копир 30, в пазах которого стоит поддон 71. Выход транспортера 113 из теплоизолированной камеры 1 является сигналом
5
0
5 Для включения лифтов: загрузочного 28, поднимающего 2 и опускающего 3,
OcTaHOB ka всех трех лифтов дает сигнал к включению устройств горизонтального перемещения внутри теплоизолированной камеры I; загрузочнот разгрузочному 4 и перегрузочному 5. При этом они перемещаются из крайнего правого пололсения в крайнее левое ( фиг Л). Перегрузочное устройство 5 совершает холостой ход, а загрузсч- но-разгрузочное 4 перемещает пустые
поддоны 71 с копира 3 на направляг щие 142, по направляющим 142 и с направляющих на копир 30. По достижении ими крайнего левого положения -разгрузочный лифт 29 расфиксируется и под действием гравитационной силы поддон 71 с замороженньв продуктом на лифте опусрсается. Упаковки 134 ставятся на 1 секции 35 копира, а поддбн опускается в пазы между секциями. После этого включается транс:портер 113 механизма 33 разгрузки и вьшодит упаковки из аппарата, Окончание работы механизма разгрузки - сигнал к обратному ходу устройств горизонтального перемещения поддонов: загрузочно-разгрузочное устройство перемещает поддоны с загрузочного лифта на поднимающий и с опускающего лифта на разгрузочный Перегрузочное устройство 5 при этом пе.ремещает поддон с поднимающего лифта 2 на опускающий лифт 3. Этой операцией заканчивается полньй цшсл работы аппарата,
В дальнейшем подробное описание работы аппарата производится по уз- ловьм методом. Все операции взаиг ю- связаны и синхронизированы во времени.
На крышку 124 стола Ii 2 между двумя последними толкателями 131 транспортера 113 поштучно подают упаковки 134 с продуктом; после заполнения одного ряда упаковок включается электродвигатель 1I7 и через редукто 1165 звездочки 118 и П 9 .с цепью 120 приводит во вращение вал П4 с шестернями 115, которые перемещают зубчатые рейки 128. Рейки передают поступательное движение кареткам 122 При перемещении по раме 121 каретки 122 на роликах 126 .ролики 133 опускаются по , косым пазам проушин 1 27,, опуская в направляющих 129 серьги 132 с толкателями 131.. При достижении роликами 133 нижних краев пазов и полком опускании толкателей 13 начинается перемещение рамы 121
- 330427
транспортера 3 на роликах 123 в направляющих 125 по крьшже 124 стола 112. При этом толкатель 131 пере-двигает вперед ряд упаковок. Для тоэ .
го чтобы при загрузке упаковки устанавливались правильно на копир 30, на крьшгке 124 стола 112 установлены стрелки 151. Их функция - раздвинуть
10 упаковки 134 на расстояние m друг от друга, соответствующее размещению секций 135 копира. Перемещение производится на один шаг - расстояние 1 между осями двух сос едних толкате15 лей. После остановки транспортера происходит его обратное движение: каретка 122 возвращается в исходное
положение по раме 121, поднимая при этом в обратной последовательности
серьги 132 с толкателями 131. После полного поднятия толкателей и достиения роликами 133 верхних краев пазов в проушинах 127 рама 121 возвращается в исходное положение.
Происходит накопление второго ряда упаковок и повторяется ход 1 транспортера ПЗ с тем отличием, что передвигается два ряда упаковок. По- рядное перемещение упаковок производится с целью предотвращения набегания упаковок друг на друга, их перекоса и заклинивания в процессе перемещения. Количество ходов зависит от-числа рядов п устанавливаемых
на-противень упаковок. Оно равно п -1.После заполнения последнего ряда упаковок повторяются дв1-ккения транспортера 113э но при этом пере- мещение рамы вперед продолжается.
Передним краем транспортер 13 нажимает на откродную крышку 34 загрузоч-- ного окна 24,, и она на щарнир ах 36 поворачивается. Транспортер 113- вводит упаковки в открытое окно 24
теплоизолированной камеры 1 и устанавливает их на секции 135 копира 30, на котором стоит поддон 71. При об- ратном движении транспортера 113 поднимаются сначала толкатели 131
обратным ходом каретки 122, рама 121 возвращается в исходное положение, закрьшая при этом крьппку 34 загрузочного окна 24,
Закрытие загрузочного окна 24 является сигналом для начала следующего этапа загрузки - поднятия поддона 71 на направляющих 69 загрузочного лифта 28, При этом перегородки 138 поддона 71, находившиеся в па7
зах между секциями 135 копира 30, проходят между упаковками и поднимают их за фланцы. Таким образом, упаковки 34 оказьшаются на поддоне в подвешенном состоянии. Лифт 28 поднимает поддон на верхний уровень устройства 4.
Привод устройств горизонтального перемещения и лифтов, расположенных в теплоизолированной камере 1, осуществляется от механизма 38 привода После закрытия загрузочного окна 24 включается мотор-редуктор 40. Одновременно о ключаётся тормозная муфта 47 и включается приводная муфта 45.Через предохранительную муфту 41, редуктор 42, муфту 45, вал 49, редуктор 43, катушку 51, вал 12, редуктор 8 и вал 13 вращательное движение передается на редуктор 9, от которого через валы 14 и 15 и редукторы 10 и 11 приводятся в движение верхние валы 61 транспортеров 55 и 56 поднимающего лифта 2.. Через несущие цепи 67 и 68 на звездочках 63 и 64 и звездочки 65, 66 вращаются валы 62 поднимающего лифта. От валов 62 через звездочки 74, 75 и цепи 76 приводятся в движение транспортеры 53 и 54 загрузочного лифта 28. Верхние валы транспортеров 57 и 58 опускающего лифта 3 приводятся в движение от верхних валов транспортеров поднимающего лифта 2 через редукторы 73. Таким образом, работа лифтов 2,3 и 28 синхронизирована.
Перемещение поддонов 71 на лифтах 2 и 3 осуществляется на высоту, равную расстоянию между двумя соседними направляющими 69-на лифте. По окончании перемещения отключается мотор-редуктор 40, одновременно включается тормозная муфта 47 и , ключается приводная муфта 45. .
По окончании движения лифтов включается мотор-редуктор 40, одновременно отключается тормозная муфта 48 и включается приводная муфта 46. Через предохранительную муфту 41, редуктор 42, муфту 46, вал 50, редуктор 44, катушку 52, вал 18, редуктор 16, вал 20 с шестер нями 22 движение передается на зубчатые рейки 84 загрузочно-разгрузоч- ного устройства 4, а через вал 19, редуктор 17, вал 21 с шестернями 23 - на зубчатые рейки 87 перегрузоч7330427 В .
ного устройства 5, Таким образом синхронизирована работа устройств горизонтального перемещения.
Перед началом движения устройств горизонтального перемещения рамы обоих устройств находятся в крайнем правом положении (фиг.1). т.е. смещены в сторону разгрузочного окна.
10 Движение загрузочно-разгрузочного устройства 4 начинается с перемещения кареток 78 с зубчатыми рейками 84 на роликах 83 по раме 77. При этом пальцы 85, установленные на ка15 ретках, набегают на рьнаги 82, установленные на раме 77, и проворачивают их. Вторым своим плечом рьиа- . ги 82 давят на толкатели 81: толкатели 81 , установленные из верхней
20 стороны рамы 77, при этом опускаются и устанавливаются в гнезда рамы, а толкатели, установленные на нижней стороне, вьщвигаются. После того как каретка 78 доходит до упора,
25 рама 77 начинает перемещаться по роликам 79 влево, передвигая нижними толкателями 81 пустые поддоны 71 от разгрузочного окна к загрузочным, с копира 31 на направляющие 142, по
30 направляющим 142 и с направляющих 142 на копир 30. Толкатели 81 попарно упираются в края поддонов 71, расположенных на копире 31, на направляющих 142 под опускающим 3 и под35 нимающим 2 лифтами. При перемещении загрузочно-разгрузочного устройства 4 задний край поддона 71, расположенного на копире 31 набегает на скошенный край секций 135 копира 31
40 а передний край поддона 71, расположенного на направляющих 142 под под- нимающим лифтом 2, набегает на скошенный край секции 135 копира 30 и скользит, повторяя их конфигурацию,
45 на поверхности секций копиров. По окончании движения транспортера ; пустой поддон устанавливается на копир 30. При этом верхняя поверхность рамы 137 и перегородок 138 поддона
50 71 располагается в одной плоскости с поверхностью секций 135 копира., занимая пазы между секциями 135.
Перемещение перегрузочного устройства 5 происходит при взаимрдейст55 ВИИ шестерен 23 с зубчатыми рейками 87, установленными на раме 86. Рама 86 с зубчатыми рейками 87 катится на роликах 88. В момент набегания толкателя 91 на захваты 98 толкатель
проворачивается на оси 90 и зацепляется фиксаторами 96 в верхнем положении. В левом крайнем положении устройства фиксаторы 96 набегают на копиры 97 и выходят из зацепления с толкателем. Под собственным весом толкатель проворачивается на оси 90 5 возвращаясь в исходное положа- НИИ фиксируемое утором 92.
По достижении горизонтальными устройствами крайнего левого положе- ния мотор-редуктор останавливается включается тормозная муфта 48. Обратный ход устройств обепсечивается отключением тормозной муфты 48 с изменением направления вращения мотор-редуктора на обратное (реверс).
Обратное движение загрузочно--раз- грузочного устройства 4 начинается с движения кареток 78 вправо на роликах 83 по раме 77, При-этом пальцами 85 на каретках 78 рычаги 82 прово рач:1гааются в обратную сторону, утаи ливая в пазы на раме тоожатели 8, расположенные на нижней стороне рамы 77, и вьщвигая толкатели на верхней стороне рамы. После того как каретки 78 доходят до упора, рама 77 начинает перемещаться вправо по роликам 78. Толкатели 81 на верхней стороне рамы передвигают загрул енные поддоны; с направляющих загрузочного лифта 28 на направляющие поднимаюш:е го лифта 2, а с опускающего лифта 3 на разгрузочный лифт 29
При перемещении вправо ( фиг,I перегрузочного устройства 5 рама 86 катится по роликам 88., штоки 94 толкателя 91 упираются в поддон 71, находящийся гна верхнем ярусе поднимающего лифта 2, и перемещают его на направляющие опускающего лифта 3, Проходя захваты 98,, толкатель 91 отклоняет их вперед на осях 100. После прохождения то,гжателем захватов 98 последние под действием пружин 99 возвращаются в исходное положение до уг(ора 101,
В предлагаемом скороморозильном аппарате предусмотрено конструктивно решение, призванное исключить пример зание поддонов 71 к направляющим 69 в процессе замораживания. С этой
целью на несущей поверхности направ- 55 движении лифта вниз направляющие 69
ляющих 69 установлены винт.:. 70, головки которых выступают над несущей поверхностью направляющих 69 и выюл- нены из материала С -низкими адгезионсвоими концами давят на свободные концы фиксаторов 144, проворачива- ют их на осях 146, возвращая в исходное положение до упора в винты
0.
5
ньп-1и свойствами, например из фторопласта. .Гаким образом, контакт поддона с направляющими осуществляется не по всей площади направляющих, а по точкам. В этом случае примерзание исключено.
Однако в процессе эксплуатации аппарата возможно такое положение, при котором oбpaзs oщaяcя на направляющих 69 ледяная корка по высоте превьппает головки винтов 70 и возможно примерзание поддона к направляющим. Наибольшая вероятность при5 мерзания - ка поднимающем лифте 2. В этом слз чае на перегрузочном устройстве 5 происходит подрьш клиновидной планкой. Его действие заключается в следующем. Примерзший к направляющим поддон оказьшает сопротивление толкателю 91, и штоки 94 при перемещении устройства 5, сжимая пружины 95, устапливаются в отверстиях толкателя 91. Подрывной клин 93 с углом у основания заходит под дно поддона 5 поднимая острой кромкой его край. Происходит откол ледяного, припая на поверхности контакта и освобождение поддона. После этого соп ротивление поддона перемещению снижается и под действием пружин 95 штоки 94 возвращаются в исходное положение .
По.сле возвращения горизонтальных
5 устройств в исходное положение мотор-, редуктор 40 останавливается, отключается приводная 46 и включается тормозная 48 муфты.
0 Разгрузка осуществляется разгрузочным устройством .27 в момент нахождения устройств горизонтального .перемещения в крайнем левом положении. При выходе рамы 77 устройства 4
5 из. створа разгрузочного лифта 29
скобы 148, ограничев:ные упорами 150, давят на флшжи 145, вьюодя фиксаторы 144 из зацепления с направляющими 69 лифта 29, Расфиксированный лифт
0 29 под тяжестью поддона 71 с продуктом опускает его на копир 31. Поддон опускается до упора в раму 136уЗ- улаковки 134 устанав.ливаются на секциях 135 (аналогично копиру ЗО), При
0
своими концами давят на свободные концы фиксаторов 144, проворачива- ют их на осях 146, возвращая в исходное положение до упора в винты
147. Таким образом, следующая пара
О ,
направляющих 69 фиксируется на уровне подачи загруженных противней. При обратном движении устройства 4. скобы 148, набегая на флажки 145, проворачивают их на осях 149.
После этого как горизонтальные устройства останавливаются в крайнем левом положении, разгрузочный лифт 29 опускается, выводя упаковки 134 из пазов поддона, включается электродвигатель 117. механизма 33 разгрузки и приводит в движение транспортер 113 (аналогично механиз- му 32 загрузки). С поднятыми толкателями 131 транспортер 113 открьтает разгрузочное окно 25, поворачивая крьшжу 35 на шарнирах 37, и оста- навливается в крайнем левом положени над копиром 31. При обратном движении транспортера опускаются толкатели 131, и упаковки 134 с замороженным продуктом вьшодятся из теплоизолированного контура. При этом разгрузочное окно 25 закрывается крышкой 35. Съем упаковок со стола 112 производится аналогично накоплению их по рядам, но в обратном порядке.
Воздухоохладители 6 и 7, установ- ленные в торцах аппарата, работают непрерьгоно. Вентиляторы 105 отключаются только на время оттайки.Замораживание происходит в основном при движении продукта на поднимаю- щем 2 и опускающем 3 лифтах в потоке воздуха, проходящего через грузовой объем в зазорах, образованных поддонами 71 с упаковками 134 и плас тинами 72 на цепях лифтов.
Вентилятор 105 воздухоохладителя 6 просасывает воздух из нижней испарительной батареи 103 через воз- духовод 107. этом обеспечивается отвод тепло- и влагопритоков, подведенных к воздуху в процессе его взаимодействия с продуктом. Через воздуховод 108 воздух нагнетается в верхнюю испарительную батарею, где отводится тепло, поступившее от вентилятора, и производится доохлаж- дение воздуха.
В воздухоохладитель 7 воздух за- сасьшается через верхнюю и нагнетается через Нижнюю испарительные батареи,
Оттайку воздухоохладителей осуществляют комбинированным способом
5
0 В
0 5 0
5
0
подачей горячих паров хладагента в испарительные батареи и орошением их снаружи теплой водой. Поскольку намерзание снеговой шубы происходит в основном на входе в воздухоохлади- , т.е. в батарее 103, продол- житёльность оттайки сокращается благодаря интенсивному орошению секций этой батареи. Для оттайки воздухоохладителя 7 орошение применяется в исключительных случаях. Для предотвращения конденсации влаги на деталях изолированной камеры 1 при от- тайке жалюзийные решетки 109 закрывают. Оросители ПО установлены над секциями, через которые воздух из камеры подается в воздухоохладитель, т.е. в воздухоохладителе 6 - над нижней батареей, а в воздухоохладителе 7 - над верхней. Поддоны 111 устанавливают в раме 102 каждого воздухоохладителя, слив конденсата прризводится за переделы теплоизолированного контура,
Вьшолнение загрузочно-разгрузочно- го и перегрузочного устройств в виде рам, установленных на роликах внутри теплоизолированного корпуса, обеспечивает жест- кость конструкций и поддержание одинаковой температуры всех деталей устройств , что устраняет температурные деформации деталей и нарушения в соразмерности соединений. Это обеспечивает надежность конструкции в работе .Наличие толкателей на верхней и нижней горизбнтальных поверхностях рамы загрузончо-разгрузочного транспортера позволяет обеспечить перемещение загруженных противней а загрузочного устройства на поднимающий лифт, с опускающего лифта на разгру- зочное устройство и пустых противней с разгрузочного устройства в загрузочное; утапливание толкателей в пазах рамы позволяет обеспечить бесконтактный проход (прокатку) рамы транспортера над (под) противнями при ее обратном (холостом) ходе. Это обеспечивает надежность и удобство в эксплуатации.
Установка откидного толкателя с eg фиксаторами и упорами на перегрузочном устройстве обеспечивает его свободное перемещение на холостом ходу, а установка клиновидной планки и подпружиненных штоков гарантирует
13
безаварийность работы- отрыв поддо-- нов .от направляющих лифтов в случае их примерзания и равномерное переме,- щение по направляющим,
Размещение на верхних несущхсс поверхностях направляющих лифтов голо вок винтов, вьшолненньпс из материала с низкими адгезионными свойствами, например, фторопласта, обеспечивает меньшую поверхность контакта между поддонами и направляющими лифтов, меньшие усилия при горизонтальном перемедении поддонов по направляющим при намерзании на последних слоев льда меньшей толщины, чем высота головок винтов.
изобре тения.
1«Скороморозильный аппарат для упакованных пищевых продзгктов на поддонах,- содержащий теплоизолированную камеру, размещенные в ней воздухоохла дители, связанные с приводами вертикальные лифты с горизонтальными напг равляющими для установки поддонов загрузочно-разгрузочное и перегрузочное устройства, и установленные вне механизмы загрузки и разгрузки, о т л и- ч а Ю щ и и с я тем, что, с целью повьшения надежности в работе, загрузочно-разгрузочное и перегрузочное устройства содержит рамы с толкателями длй поддонов и с укрепленными по боковым сторонам зубчатыми рейками, связанными через шестерни с приводами, при этом рамы установлены с возможностью пе™
.
г30427I i
ремещения по установленным в камере роликам и толкатели загрузочно-раз- грузочного устройс тва установлены на верхней и нижней сторонах рамы с возможностью перемещения в вертикальной плоскости, а толкатель перегрузочного устройства выполнен в зиде поперечной клиновидной пленки,
10 прикрепленной к раме с возможностью откидьшания, и снабжен фиксаторами и подпружиненными штоками, причем механизмы загрузки и разгрузки содержат установленные в направляющих
15 стола на роликах рамы с укрепленными над ними с возможностью перемещения каретками с зубчатыми рейками, связанными с приводом, причем рамы имеют поперечные пластинчатые, толка20 тели, укрепленные с возможностью тикального перемещения при поступательном движении рамы на наклонных проушинах, прикрепленных к кареткам.
25 2. Аппарат по п., о тлич а ю- щ и и с я тем, что подпружиненные штоки и нижняя плоскость клиноввд- ной планки толкателя перегрузочного устройства установлены параллельно
30 Друг другу и направляющим лифтов, причем длина клш-ювидных планок меньше длины подпружиненных штоков. 3 Аппарат по п.1, о т л и ч а ю- щ и и с я тем, что направляющие лиф35 тов снабжены вийтами, головки кото рых размещены на несущей поверхности направляющих и выполнены из материала с НИЗИ1СИМИ адгезионными свойствами.
11
№ilr o)i±3№
fy
H
1J6
/
17
s
50
i
фиг 2
3(iK)
3J
«аи
5
95 94
срие.5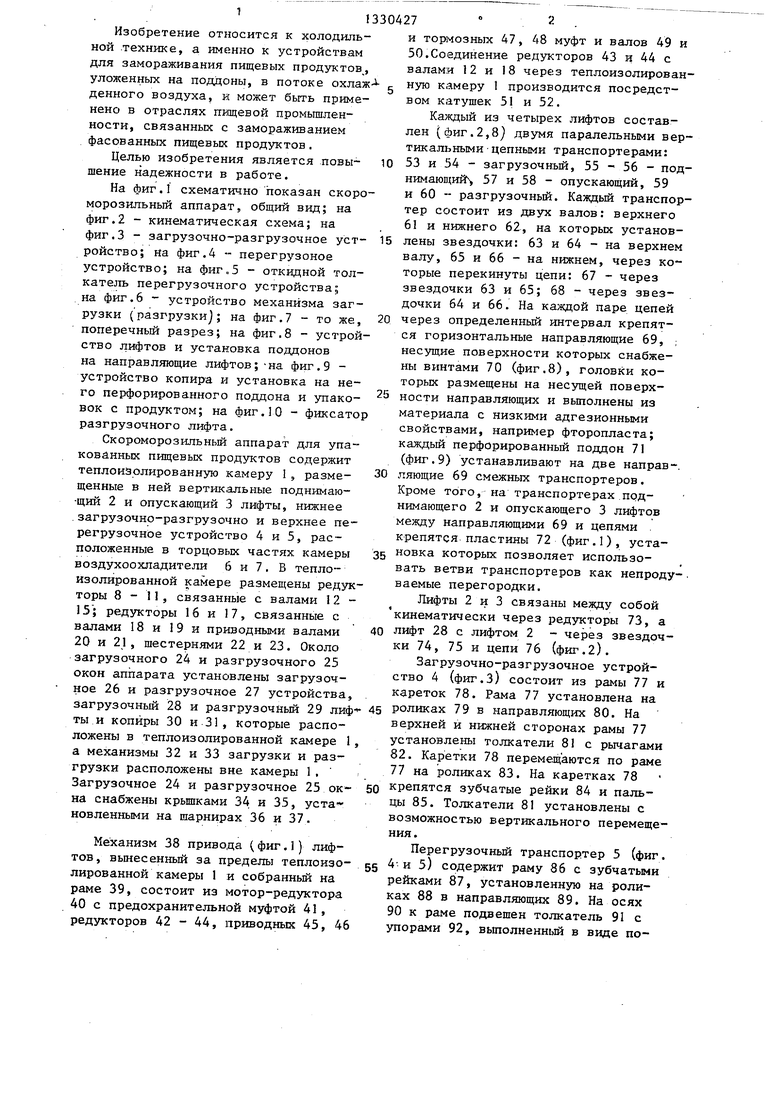
| название | год | авторы | номер документа |
|---|---|---|---|
| Скороморозильный аппарат | 1988 |
|
SU1597507A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Автоматическая линия для упаковывания электрических ламп | 1987 |
|
SU1620371A1 |
| УСТРОЙСТВО для ОХЛАЖДЕНИЯ ПИЩЕВЬГХ ПРОДУКТОВ, или ПОЛУФАБРИКАТОВ | 1966 |
|
SU188517A1 |
| Скороморозильный аппарат | 1989 |
|
SU1735685A1 |
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| СКОРОМОРОЗИЛЬНЫЙ АППАРАТ ДЛЯ ПИЩЕВЫХ ПРОДУКТОВ | 2000 |
|
RU2196284C2 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2018 |
|
RU2695863C1 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| Линия для склеивания пиломатериалов по ширине | 1981 |
|
SU1020244A1 |
Изобретение относится к холодильной технике, а именно к устройствам для замораживания пищевых продуктов, уложенных на поддоны, в 32 26 потоке холодного воздуха, и направлено на повышение надежности в работе . С помощью загрузочного устройства 24 осуществляют подачу продуктов в корпус (к) 1, а затем дальнейшее транспортирование их внутри К 1 горизонтальными загрузочно-разгрузоч- ными устройствами (ЗРУ) 4, лифтом 2, перегрузочным устройством (ПУ)5, лифтом 3 с одновременным замораживанием с помощью воздухоохладителей 6 . и 7, а затем производят разгрузку с помощью устройства 25. ЗРУ 4, ПУ-5 и установленные вне камеры 1 механизмы 32 и 33 соответственно загрузки и разгрузки содержат установленные на роликах рамы связанные через зубчатые рейки с приводами и укрепленные на них толкатели для перемещения поддонов. Этим Обеспечивается жесткость конструкции, а выполнение толкателей гарантирует безаварий-с ность работы. 2 з.п.ф-лы, 10 ил.. 17 69 i (Л С 00 00 о фиг.1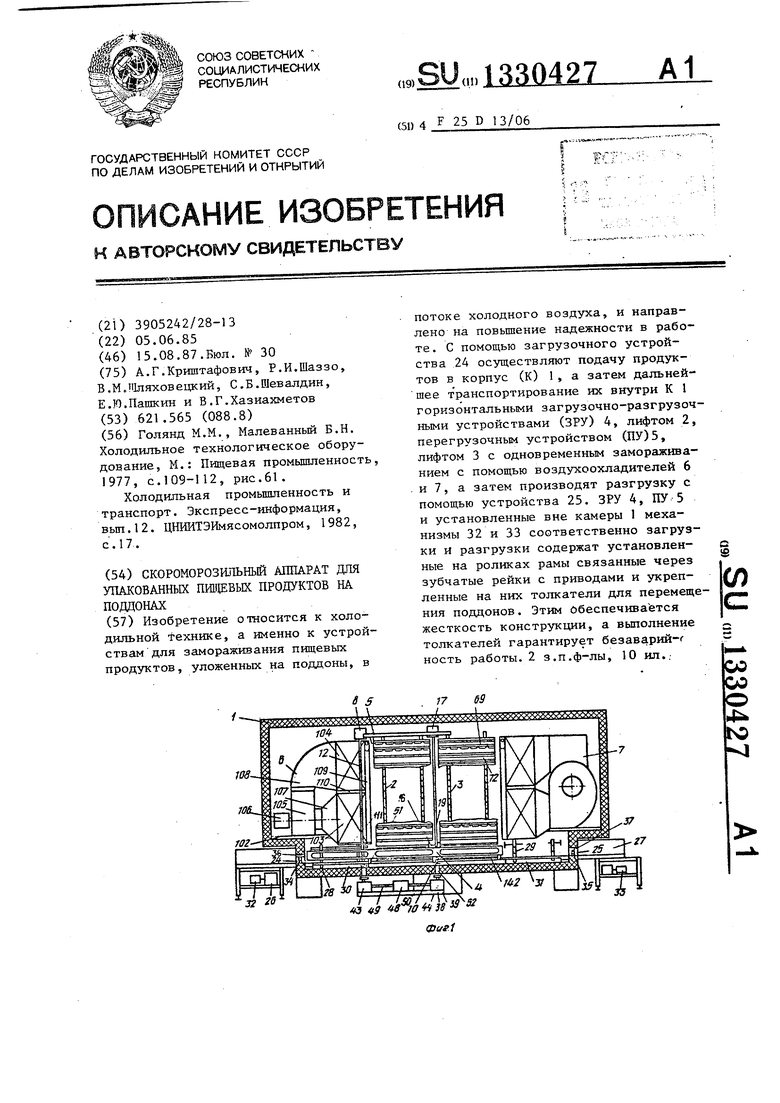
гэа
at
ist
at
Й57
//«
132
fH
US
774
V
75
фиг.7
Si
J38
Составитель И.Шабалина Редактор А.Маковская Техред Л.СердюковаКорректор М„Шароши
Заказ 5722Тираж 476Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская д.4/5
Производственно-полиграфическое предприятие, г.Ужгород,, ул. Проектная, 4
Фи8. 15
| Голянд М.М., Малеванный Б.Н | |||
| Холодильное технологическое оборудование, М.: Пищевая промышленность, 1977, с.109-112, рис.61 | |||
| Холодильная промышленность и транспорт | |||
| Экспресс-информация, вып.12 | |||
| ЦНИИТЭИмясомолпром, 1982, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
