1
Изобретение относится к области систем автаматичеокого управления и может быть Иопользоваио в системах управления летательными аппаратами, содержащих релейные привода и подБержениых воздействию гармонических яюмех.
Известно устройство для ко(М|ПбН1са1Ции помех, содержащее элемент с опра ичением, интегратар, операщионный усилитель ,1.
Недостаток устройства заключается в том, что элементы его вносят нежелательный «интегрирующий эффект ири работе системы в линейном .режиме (без ограничения) и «е обеспечивают высокой точиасти компенсации влияния ограничения, так как оформированный комленсирующий сигнал не зависит от величины ограниченной части управляющего сигнала.
-Известно устройство дл-я комленсации помех 2, содержащее как элементы с ограничением, так и их модели. Применение этого устройства в автоматичеоких системах позволяет расширить дниейную зону элементов с ограничением. Однако во многих системах линейная зона задана постоянной величиной. Расширение линейной зоны, например, в системах автоматич&окаго у1пра1вления беопялотными летательными аппаратами приводит к увеличению расхода энергии, габа1ритов и веса исполнительных устронст1В и величины перегруз|ки.
В aBTOpiGKOM свидетельстве № 402855 описано устройство для компенсации помех, содержащее усилитель с отраничениам, суммирующий интегратор и реле с двумя замыкающими и размыкающими контактами, о&мотка которого соединена с входом усилителя с ограничением, пер1вый замыкающий контакт
10 включен между выходом усилителя с ограничением и первым входом суммирующего интегратора, второй замыкающий контакт включен между входом усилителя с ограничением и вторым входом суммирующего интегра 5 тора, первый размыкающий контакт включен между выходом суммирующе-го интегратора ,и его третьим входом, а второй размыкающий контакт включен между входом усилителя с ограничением и выходом суммирую.
2Q Щ6ГО интегратора ,3.
Комненсирующий сигнал изменяется по закону «затухающей экспоненты (разряд интегратора) и И1меет вид
10/
25 De ,
где т RC - лостоянная времени разряда конденсатора С в цепи обратной связи сум1мирующего ил30тепратора;
D - величина заряда интепратора .в момент око нчания ограничения, т. е. величина ограниченной .проинтегрированной части управляющего сигнала. Значение D в момент можно определить с (ПОМОЩЬЮ выражения
D I fe(coO - 5W( О
to/o
(В - А) ( - я) 4- %€OS(, пде (tu - момент начала ограничения гармоничеСкой намехи siпtй,
g((uO А sincoi; - управляющий сигнал, состоящий из постоянного (медленно изме1Няю,ще ГО|Ся) отолезного сигнала А и гафМОничеокой помехи sinco ;
В - уровень ограничения.
Для обеспечения заданной точности компенсации .необэсоднмо, чтобы величина компенсирующего Оипнала / к была пропорциональна вели1чине ограниченной части у1п,равляющаго сигнала. Это условие обеспечения заданной точности компенсации имеет вид
0)100()
J fe((oO -B}d((t} J De d((oO - 5,
tato l
где 5 - площадь ограниченной части компенСирующего сигнала nip« суммировании его с управляющим сигналом иа входе усилителя с ограничением.
Величину 5 )можно найти в 0|;бщем «иде после линеаризации функции / к («О + + e(t) В SB окрестностях точки
5 .(2)
2(Д -Tcosco i)
Из выражений (1) и (2) следует, что точность компенсации зависит от величины постоянной эремеии т разряда интегратора. Зависимость постоянной времени т от (величины D заряда интегратора в (МОмент ш/ окончания О1Граничени.я имеет вид
„. 2созю 1 + D ± Y 4соз2ю - 12cosw/, + D
т
4coscaii
Однако величина т пастояпна и не зависит от заряда D интепратора в момент co/i. Поэтому недостаток устройства по авт. св. 402855 состоит в том, что постоянная временя т разряда суммирующего интегратора не зависит от вели1Ч1Ины D его заряда в .момент со/ окончания ограничения, что снижает точность компенсации влияния одностороннего ограничения помехи на динамические свойства системы а.втоматического управления летательным аип аратом.
Цель изобретения - повышение томности |Ком|Пенса:ции влияния одностороннего ограничения по1мехи на динамические свойства системы автоматического управления летательным ашпаратом. Это достигается в дредлагаеiMiOM устройстве для компенсации помех тем, что оно содержит раввязывающий блок, п реле с разными уровнями срабатывания и п
параллельно соединенных блоков обратной ювязи суммирующего интегратора, при этом 1ВХОДЫ п реле подключены .к выходу развязывающего блока, ВХ10Д которого посоединен к наподвинсному .размыкающему контакту релейного элемента, включенному в цепь -между входом усилителя с ограни1чение.м м выходом суммирующего интегратора. Причем каждый блок обратной -авязи суммирующего интеграTQpa состоит из по1слвдовательно соединенных
п-го резистора, замыкающего контакта п-го реле и размыкающих контактов (п-1)-го реле. Такое конструктивное решение обеспечи1вает изменение постоянной времени ра.зряла интегратора -в зависимости от величины
его разряда, что павышает точность компенсации вл1ияяия односторо.ннего ограничения |НомеХ|И н-а динами ку системы.
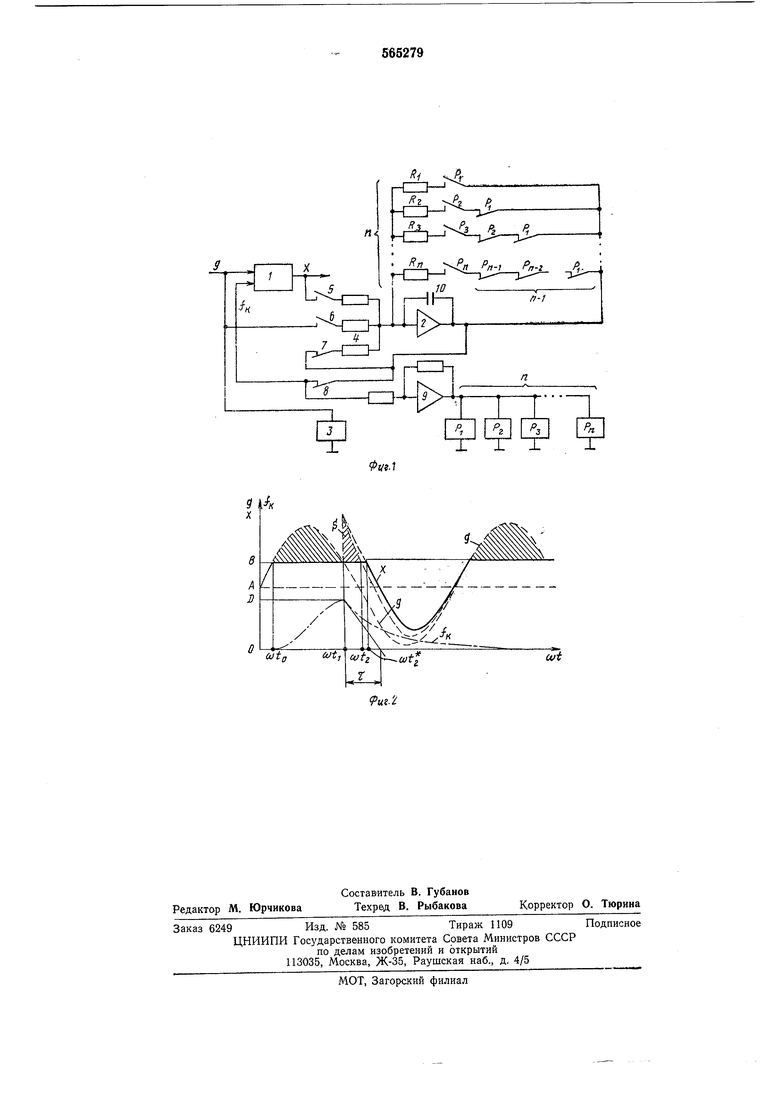
Схема аписываемого устройства .приведена иа фиг. .1.
Устройство содержит усилитель 1 с ограничением, суммирующий интегратор 2, релейный элемент 3, рез;истор 4 в цепи об ратной связи сум1мирую|щего интегратора, за.мьжающие 5, 6 и раамьькающие 7, 8 контакты релейного элемента, р-аз1ВЯ13Ы1ваюЩий бло1К (усилитель) 9.
1СИ1Гналов, поясняющие ра|боту устройства, .представлены на фиг. 2, оде приняты следующие обозначения: g - управляющий
сигнал, / к - компенсирующий сигнал, S - площадь олраииченной части сигнала, Л - полезный сигнал, В - уровень ограничения, D - величина заряда интегратора, т - постоянная времени разряда интегратора.
Величина сопротивления резистора 4 выбирается как можно -больше, чтобы током разряда конденсатора Ю через резистор 4 можно было (пренебречь.
.Уровень срабатывания до1пол.нительных реле и величины сопротивлений резисторов в дополнительных обратных овязях суммирующего интегратора имеют зависимости соответствующего ви1да
РП ...
Rz ...Rn-i Rn .
Устр.ой1ст1во работает сле(дующ.И|М образом, Полезный сигнал Л и гарлюническая помеха sincoi подаются на вход усилителя 1 с ог55 раничением и на релейный элемент 3, порог чувствительности (Которого 1соответст1вует уровню ограничения В.
iB мо;мент в.рамени о)/о (фиг. 2), котором происходит ограничение амплитуды гармонической .помехи, срабатывает релейный элемент, замыкающий контакт 6 которого подключает цепь упрайл.яющего 1си1гнала к входу суммирующего интегратора 2, а замыкающий контакт 5 по.дключает вход усилителя I с ограничением к другому входу суммиуЮщёго ийтегратора. При этом .размьжаю|ИЙ контакт 7 разрывает цепь обратной свяи суммирующего интегратора, а разМыжающий контакт 8 отключает вхад усилителя с ограничением от выхода сум1мирующего интегратора. Сум,М рую1Ций интегратор интегрирует разностный -сигнал.
В момент .времени coti, /при котором не происходит опраничения; релейный элемент 3 отклю/чается и размыкающий контакт 8 подключает выход сулширующего интегратора 2 к (ВХОДУ усилителя 1 -с оградиичением и через развязываю щий усилитель 9 к входам реле PI, PZ, РЗ, , РП- Размыкающий контакт 7 подключает параллельно оу;М|МИрующбму интегратору резистор 4. Однако солротивлвние резистора 4 (Вьибрано такйм, что так разряда ковденсатора 10, (проходящий через резистор 4, лренабрежилю мал. Замьжающие ко.нтакты 5 и 6 релейного элемента 3 яри его отпуокании от1ключают входные цепи Суммирующего интегратора 2 от «хода и выхода усилителя € ограничением. В этот же момент срабатывают те «з реле Р, Р, , Рnt Уровень €ра1батывания которых ниже напряжения на (Выходе суммирующего интегратора. Контакты этих реле подключают один «з резисторов Rn, Rii-, ..., Ri с максимальным сопротивлением (параллельно суммирующему (Интегратору. Последний рааряжается по а(периодическому закону, достоянная времени разряда которого изменяется s соответствии с величиной D заря1да суммирующего интегратора, что 0:беапечивает заданную точность комленса.цни.
Таким О бразо.1, на В|Ход усилителя I с ограничением (Поступает жомиенсирующий сигнал /к, Пропорциональный заряду суммирующего инте1Г ратора 2, который комяенсирует влияние одностороннего ограничения помехи на динамические Овойстеа системы.
Технико-зкономичеокая эф,фекти1вн6сть предложенного устройства состоит в , что при внедрении его в системы автоматического удравления с ограничением, подверженные воздействию помех, улучшаются их динамические свойства за счет повышения точности «омленсащии влияния ограничения амплитуды помехи.
Ф о р м у л а изобретения
1.Устройство для (каМ(иенсащИ(И помех по авт. св. N° 402855, отличающееся тем, что, с целью повышения точности компенсации, оно содержит развязывающий блок, п реле с разными уровнями срабатывания и п параллельно соединенных блоков обратной связи суммирующего интегратора, при этом входы п реле подключены к выходу развязывающего блока, , .которого подсоединен к неподвижному размыкающему Ж01нтакту релейного элемента, включенному в цепь .между входо.м усилителя с ограничением и выходом суммирующего интегратора.
2.Устройство по п. 1, отличающееся тем, что каждый блок обратной связи суммирующего интегратора состоит из последовательно соединенных п-го резистора, замыкающего контакта п-го реле и размыкающих контактов (п-1)-ых реле.
Источники информации, принятые во внимание при экспертизе
1. Тэлер Дж. и Пестель М. «Анализ и расчет нелинейных систем автоматического лт5раеления, «Энер:гия, 1964, с. 361-366.
СССР
2 Авторское свидетельство № 344407, кл. G 05В 5/01, 16.09.70.
СССР 3. А,вторское ов1И1детельство 0 № 402855, (КЛ. G 05В 5/0,1, 29.04.72
(inpOTOтип).
j
X Г ЕГ Г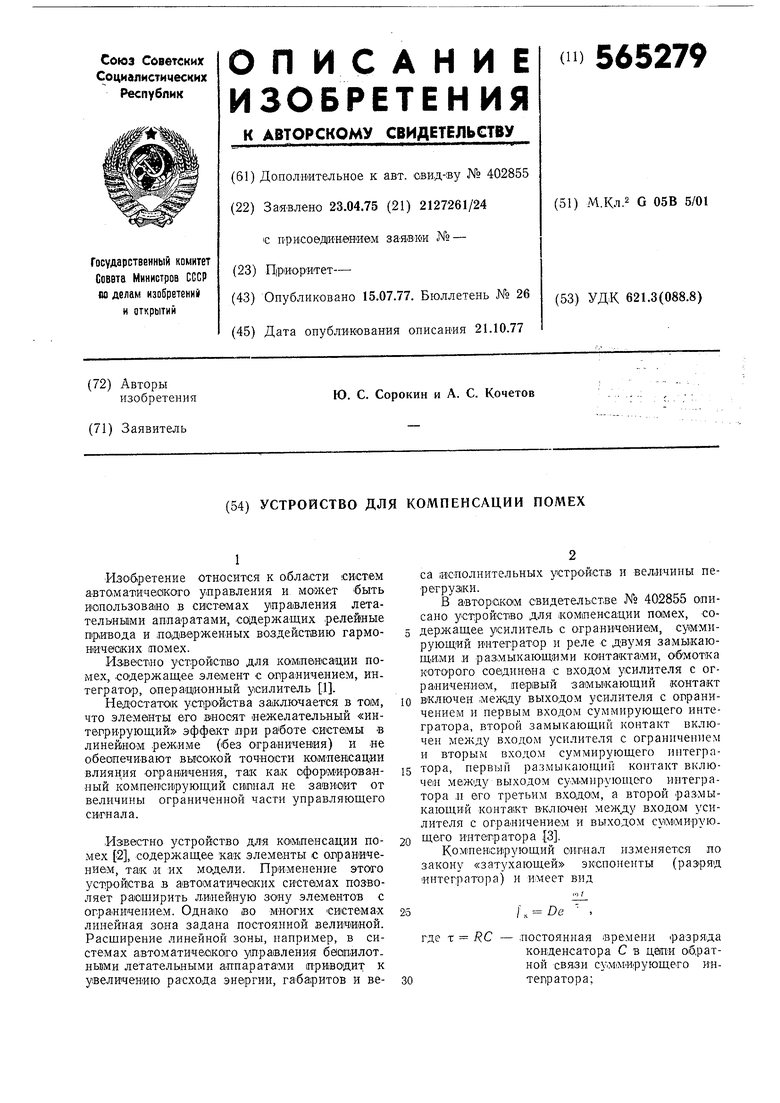
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации помех | 1976 |
|
SU660015A2 |
| Фотореле | 1989 |
|
SU1653021A2 |
| Фотореле | 1978 |
|
SU720559A2 |
| Устройство для контроля релейных объектов | 1975 |
|
SU585478A1 |
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| Кодовая рельсовая цепь переменного тока | 1988 |
|
SU1613374A1 |
| Устройство для компенсацииОгРАНичЕНия | 1974 |
|
SU809043A1 |
| Устройство для моделирования вентильного электродвигателя | 1985 |
|
SU1425732A1 |
| Устройство для компенсации помех | 1978 |
|
SU763846A2 |
| Устройство для моделирования импульсного датчика частоты вращения | 1985 |
|
SU1251118A2 |