1
Изобретение относится к области машиностроения, а именно к манипзляторам, применяемым для механизации ироизводствеиных операций, производимых в опасных для человека средах.
Известен манипулятор с позиционным управлением (копирующий манипулятор), задающая и исиолиительная руки которого имеют кинематические аналоги плеч, предплечий, локтей п запястий и содержат датчики положений и следящие приводы 1.
Недостатком известного манинулятора является то, что при ограниченном рабочем пространстве задающей руки манипулятора и введении рассогласований по положению соответствующих звеньев задающих и исполнительных рук достигается значительное увеличение объема обслуживаемого пространства исполнительных рук. Однако конструкция известного манипулятора не может обеспечить при этом однозначного соответствия ориентации в пространстве его исполнительного органа, что усложняет процесс уиравлепия.
Наиболее близким рещеннем из известных является манипулятор, в котором содержатся подобные друг другу задающая и исполнительная руки, включающие кинематические аналоги плеч, предплечий, локтей и запястий, состоящих из шарнирных звеньев с захватом на исполнительной руке и соединенных с основанием базовым звеном, и механические нередачи 2.
Однако такой манипулятор не позволяет обеспечить ориентации исиолнительного органа при увеличении величины обслуживаемого пространства исполнительной руки в случае рассогласованных полол :ений плеч, предплечий, локтей рук манипулятора, это снижает его эксплуатационные качества.
Цель изобретения - повышение эксплуатационных качеств манипулятора путем обеспечения позиционного управления захватом при рассогласованных положениях илеч, предплечий и локтей этих рук.
Для этого запястье каждой руки снабжено донолнительным звеном, ностояино ориентированным вдоль оси вращения плеча, и соединено с валом, установленным на основании, иосредством дифференциала, водилом которого
является базовое звено.
Такое выиолнение манипулятора обеспечивает позиционное уцравление захватом при рассогласовапых положениях плеч, предплечий и локтей, что позволит значительно увеличпть величин} обслул :иваемого пространства исполнительной руки при ограниченном рабочем пространстве задающей руки.
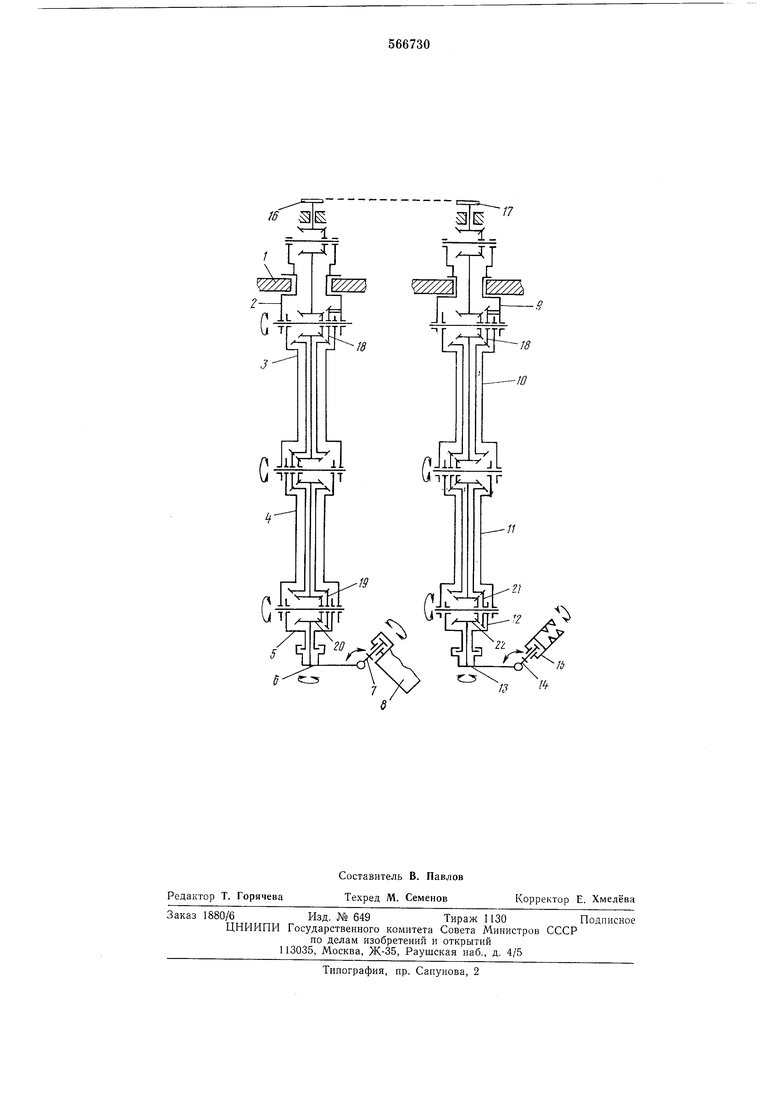
На чертеже изображена кинематическая схема манинулятора.
Манипулятор содержит основание 1, на котором смонтированы подобные друг другу задающая и исполнительная руки. Задающая РЗка соединена с основанием 1 базовым звеном 2 и включает кинематические аналоги плеча 3, предплечья 4, постоянно ориентированное звено 5 и постоянно ориентированные звенья 6-8. Исполнительная рука соединена с основанием 1 базовым подвижным звеном 9 и включает кинематические аналоги плеча 10, предплечья 11, постоянно ориентированное звено 12 и звенья захвата исполнительной рукп 13-15. Механические передачи содержат шестерни 16-22.
Манипулятор работает следующим образом.
При наличии рассогласований по положению одноименных звеньев 3 и 10, 4 и И задающей и исполнительной рук манипулятора, механические передачи 18-19 и 18-21, каждая с передаточным отноп1еиием, равным едиииде, обеспечивают неизменное относительное положение звеньев 2 и 5, 9 и 12 соответственно. При Бведенпи рассогласований ио ноложенпю между базовыми подвижными звеньями 2 и 9 механические иередачи 6-16 и 13-7 с частными иередаточными отношениями, равиыми единице, обеспечивает одинаковую направленность звеньев 6 и 13. Рассогласования компенсируются введенными в механическую передачу дифференпиалами, водилами которых являются базовые звенья 2 и 9.
Равенство перемещений звеньев 16 и 17 относительно основания звеньев 7 и 14 относительно звеньев 14 и 13, а также звеньев 8 и 15 относительно звеньев 7 и 14 соответственно обеспечиваются обратимыми следящими системами (на фиг. I не иоказаны).
Формула изобретения
Манипулятор, содержащий механические руки, звенья которых представляют кипематпческие аналоги плеч, предплечий и запястий, установленные на основании при помощи базовых звеньев, и механические передачи, о тличающийся тем, что, с пелью повыщения эксплуатационных качеств путем обеспечения позиционного управления при рассогласованных положениях звеиьев, заиястье каждой руки снабжено дополнительным звеном, постоянно ориентнрованным вдоль осп вращения плеча, и соедииено с валом, установленным на основании, иосредством диффереипиала, водплом которого является базовое звено.
Источники информации, ирпнятые во внимание при экспертизе
1.Патент США № 3.280.991, кл. 214-1, 1964.
2.«Манипулятор М-18. Каталог-сиравочник «Манипуляторы. Л., 1968, с. 105.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| СПОСОБ УПРАВЛЕНИЯ РОБОТОМ С ПОМОЩЬЮ КОНТРОЛЛЕРОВ И ШЛЕМА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2019 |
|
RU2718240C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| Опора для человека | 2022 |
|
RU2799671C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| Манипулятор | 1978 |
|
SU797926A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |