Известны манипуляторы с ручным управлением, состоящие из задающего устройства с рукояткой, на которую воздействует оператор и исполнительной руки, обладающей семью степенями подвижности, включая движение схватывания, звенья которой сочленены одно с другим последовательно с помощью поступательных и вращательных кинематических пар, приводов звеньев исполнительной руки и системы управления приводами, содержащей вычислительное устройство. В качестве вычислительного устройства в известном манипуляторе используется универсальная аналоговая электронная вычислительная машина.
Предлагаемый манипулятор содержит специализированную механическую аналоговую модель исполнительной руки, основанную на использовании следящих систем. Это повыщает надежность и упрощает систему управления исполнительной рукой.
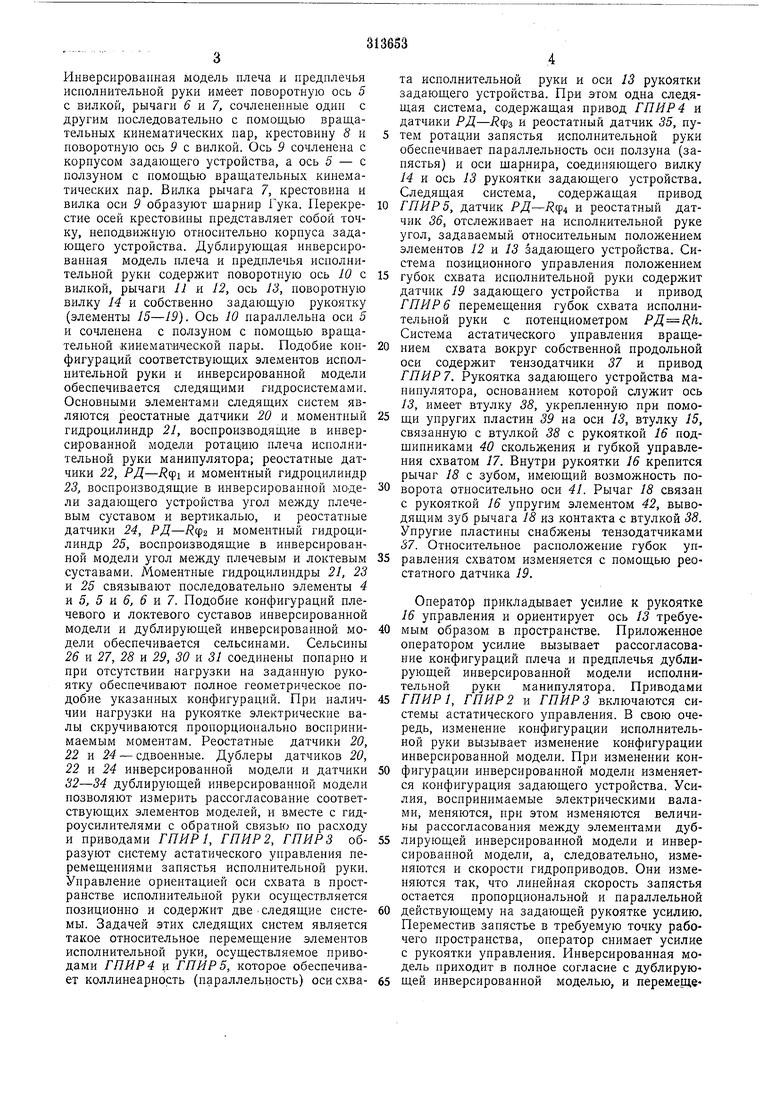
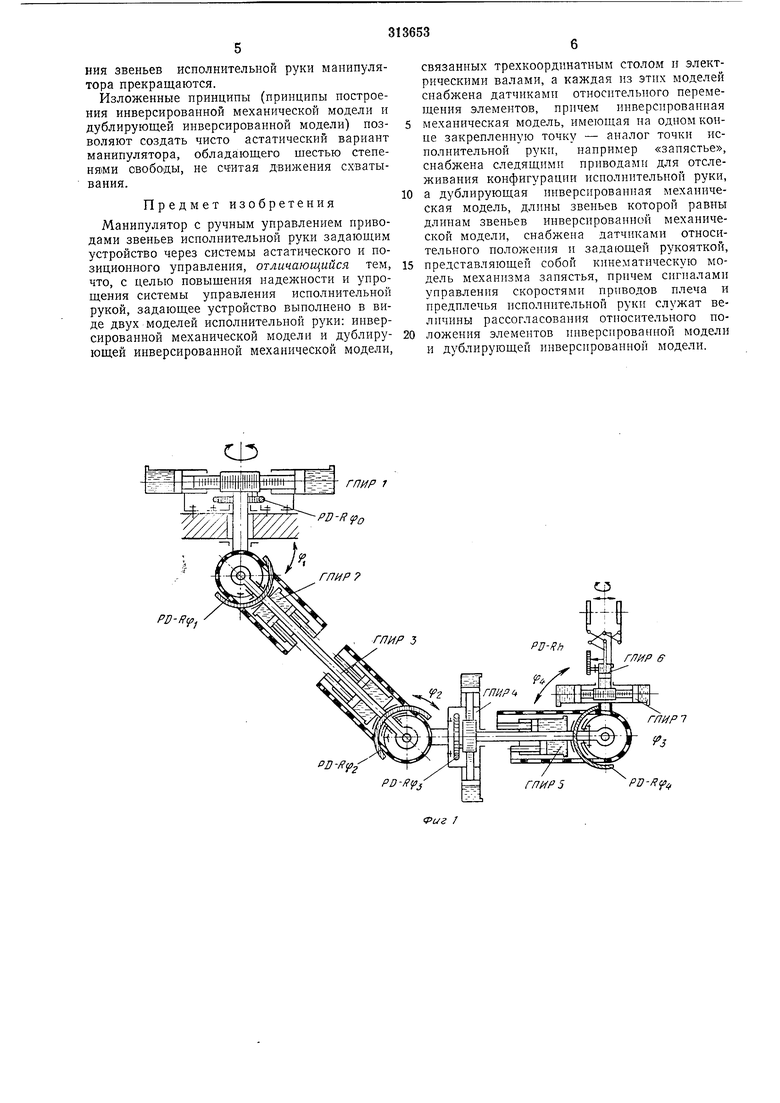
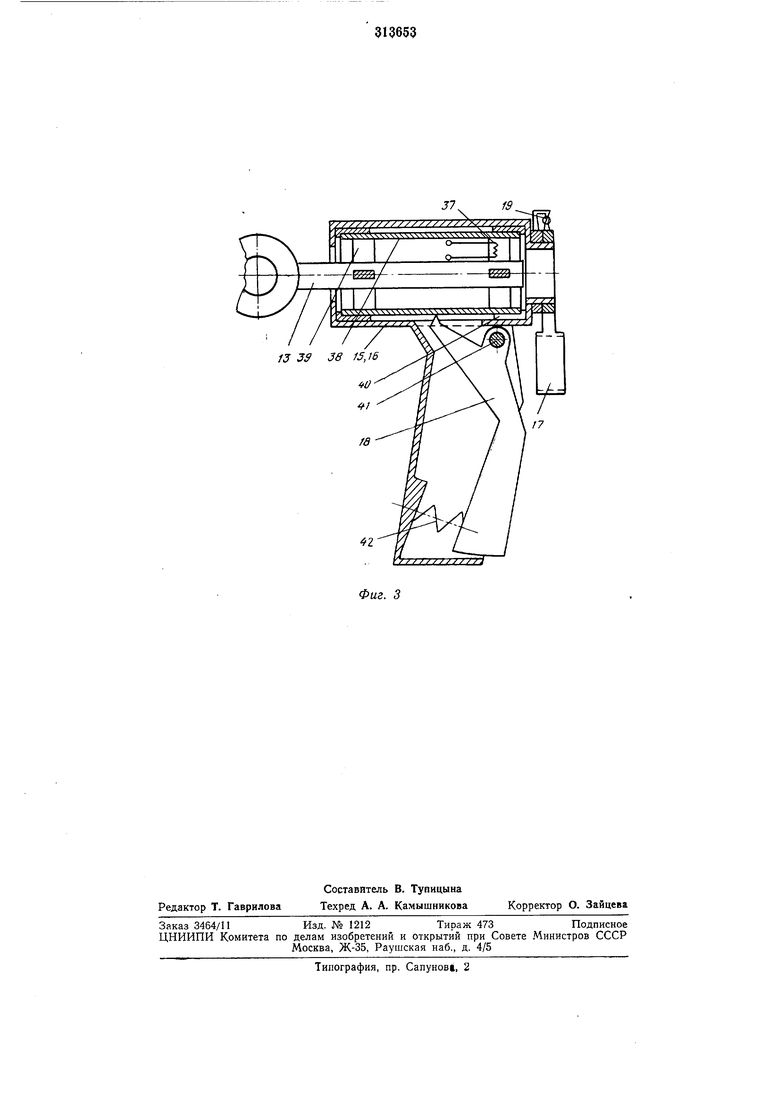
На фиг. 1 изображена исполнительная рука на фиг. 2 - конструктивная схема задающего устройства; на фиг. 3 - элементы задающего устройства.
Исполнительная рука, имеет семь степеней свободы, включая движение губок схвата, и снабжена силовыми приводами относительного перемещения ее элементов и датчиками относительного положения этих элементов. В
качестве датчиков использованы реостатные датчики,
, ЯД-ЛФ2, , PM-R(f4, РД-Rh.
которые отслеживают относительные углы поворота элементов исполнительной руки. Каждый из гидравлических приводов исполнительной руки (ГПИР) снабжен гидроусилителем, осуществляющим связь гидроцилиндра с маломощной электрической системой измерения и управления. Задающее устройство содержит инверсированную механическую модель плеча и предплечья исполнительной руки и позволяет осуществлять смещанное позиционно-астатическое управление приводами исполнительной руки. Элементами задающего устройства являются направляющие /, обеспечивающие плоскопараллельное перемещение рамы 2, которая, в свою очередь, обеспечивает плоскопараллельное перемещение ползуна 3. Ползун 4 может совершать только поступательные перемещения в пространстве и служит подвижным основанием для инверсированной модели плеча и предплечья исполнительной руки, а также для дублирующей инверсированной модели с задающей рукояткой. Эле-- 3 Инверсированная модель плеча и предплечья исполнительной руки имеет поворотную ось 5 с вилкой, рычаги и 7, сочлененные один с другим последовательно с помощью вращательных кинематических пар, крестовину S и5 поворотную ось 9 с вилкой. Ось 9 сочленена с корпусом задающего устройства, а ось 5 - с ползуном с помощью вращательных кинематических пар. Вилка рычага 7, крестовина и вилка оси 9 образуют шарнир Гука. Перекре-ю стие осей крестовины представляет собой точку, неподвижную относительно корпуса задающего устройства. Дублирующая инверсированная модель плеча и предплечья исполнительной руки содержит поворотную ось 10 с15 вилкой, рычаги 11 и 12, ось 13, поворотную вилку 14 и собственно задающую рукоятку (элементы 15-19. Ось 10 параллельна оси 5 и сочленена с ползуном с помощью вращательной кинематической нары. Подобие кон-20 фигурации соответствующих элементов исполнительной руки и инверсированной модели обеспечивается следящими гидросистемами. Основными элементами следящих систем являются реостатные датчики 20 и моментный25 гидроцнлиндр 21, воспроизводящие в инверси-рованной модели ротацию плеча исполнительной руки манинулятора; р еостатные датчики 22, PД-R((l и моментный гидроцилиндр 23, воспроизводящие в инверсированной моде-30 ли задающего устройства угол между плечевым суставом и вертикалью, и реостатные датчики 24, РД-Рф2 и моментный гидроцилиндр 25, воспроизводящие в инверсированной модели угол между плечевым и локтевым35 суставами. Моментные гидроцилиндры 21, 23 и 25 связывают последовательно элементы 4 и 5, 5 а 6, 6 R 7. Подобие конфигураций плечевого и локтевого суставов инверсированной модели и дублирующей инверсированной мо-40 дели обеспечивается сельсинами. Сельсины 26 и 27, 28 и 29, 30 и 31 соединены попарно и при отсутствии нагрузки на заданную рукоятку обеспечивают полное геометрическое подобие указанных конфигураций. При налич-45 чии нагрузки на рукоятке электрические валы скручиваются пропорционально воспринимаемым моментам. Реостатные датчики 20, 22 и 24 - сдвоенные. Дублеры датчиков 20, 22 и 24 инверсированной модели и датчики50 32-34 дублирующей инверсированной модели позволяют измерить рассогласование соответствующих элементов моделей, и вместе с гидроусилителями с обратной связью по расходу и приводами ГПИР1, ГПИР2, ГПИРЗ об-55 разуют систему астатического управления неремещениями запястья исполнительной руки. Управление ориентацией оси схвата в пространстве исполнительной руки осуществляется позиционно и содержит две-следящие систе-60 мы. Задачей этих следящих систем является такое относительное перемещение элементов исполнительной руки, осуществляемое приводами ГПИР4 и ГПИР5, которое обеспечивает коллинеарность (параллельность) оси схва-65 4 та исполнительной руки и оси 1В рукоятки задающего устройства. При этом одна следящая система, содержащая привод ГПИР4 и датчики и реостатный датчик 35, путем ротации запястья исполнительной руки обеспечивает параллельность оси ползуна (запястья) и оси щарнира, соединяющего вилку 14 и ось 13 рукоятки задающего устройства, Следящая система, содержащая привод Г ПИР 5, датчик и реостатный датчик 36, отслеживает на исполнительной руке угол, задаваемый относительным положением элементов 12 и 13 задающего устройства. Система позиционного управления положением губок схвата исполнительной руки содержит датчик 19 задающего устройства и привод ГПИР6 перемещения губок схвата исполнительной руки с потенциометром P/, Rh. Система астатического унравления вращением схвата вокруг собственной продольной оси содержит тензодатчики 37 и привод Г ПИР 7. Рукоятка задающего устройства мапипулятора, основанием которой служит ось 13, имеет втулку 38, укрепленную при помощи упругих пластин 39 на оси 13, втулку 15, связанную с втулкой 38 с рукояткой 16 подщипниками 40 скольжения и губкой управления схватом 17. Внутри рукоятки 16 крепится рычаг 18 с зубом, имеющий возможность поворота относительно оси 41. Рычаг 18 связан с рукояткой 16 упругим элементом 42, выводящим зуб рычага 18 из контакта с втулкой 38. Упругие пластины снабжены тензодатчиками 37. Относительное расположение губок управления схватом изменяется с помощью реостатного датчика 19. Оператор прикладывает усилие к рукоятке 16 управления и ориентирует ось 13 требуемым образом в пространстве. Приложенное оператором усилие вызывает рассогласование конфигураций плеча и предплечья дублирующей инверсированной модели исполнительной руки манипулятора. Приводами ГПИР1, Г ПИР 2 и ГПИРЗ включаются системы астатического управления. В свою очередь, изменение конфигурации исполнительной руки вызывает изменение конфигурации инверсированной модели. При изменении конфигурации инверсированной модели изменяется конфигурация задающего устройства. Усилия, воспринимаемые электрическими валами, меняются, при этом изменяются величивы рассогласования между элементами дублирующей инверсированной модели и инверсированной модели, а, следовательно, изменяются и скорости гидронриводов. Они изменяются так, что линейная скорость запястья остается пропорциональной и параллельной действующему на задающей рукоятке усилию, Переместив запястье в требуемую точку рабочего нространства, оператор снимает усилие с рукоятки управления. Пнверсированная модель приходит в полное согласие с дублируюЩей инверсированной моделью, и перемещения звеньев исполнительной руки манипулятора прекращаются.
Изложенные принципы (принципы построения инверсированной механической модели и дублирующей инверсированной модели) позволяют создать чисто астатический вариант манипулятора, обладающего шестью степенями свободы, не считая схватывания.
Предмет изобретения
Манипулятор с ручным управлением приводами звеньев исполнительной руки задающим устройство через системы астатического и позиционного управления, отличающийся тем, что, с целью повышения надежности и упрощения системы управления исполнительной рукой, задающее устройство выполнено в виде двух моделей исполнительной руки: инверсированной механической модели и дублирующей инверсированной механической модели.
связанных трехкоординатным столом и электрическими валами, а каждая из этих моделей снабжена датчиками относительного перемещения элементов, причем инверсированная
механическая модель, имеющая иа одном конце закрепленную точку - аналог точки исполнительной руки, например «запястье, снабжена следящими приводами для отслеживания конфигурации исполнительной руки,
а дублирующая инверсированная механическая модель, длины звеньев которой равны длинам звеньев инверсированной механической модели, снабжена датчиками относительного положения и задающей рукояткой,
представляющей собой кинематическую модель механизма запястья, причем сигналами управления скоростями приводов плеча и предплечья исполнительной руки служат величины рассогласования относительного положения элементов инверсированпой модели и дублирующей инверсированной модели.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Манипулятор | 1974 |
|
SU561656A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| Манипулятор | 1976 |
|
SU566730A1 |
| Копирующий манипулятор | 1989 |
|
SU1646842A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Система управления дистанционным манипулятором | 1975 |
|
SU582090A1 |
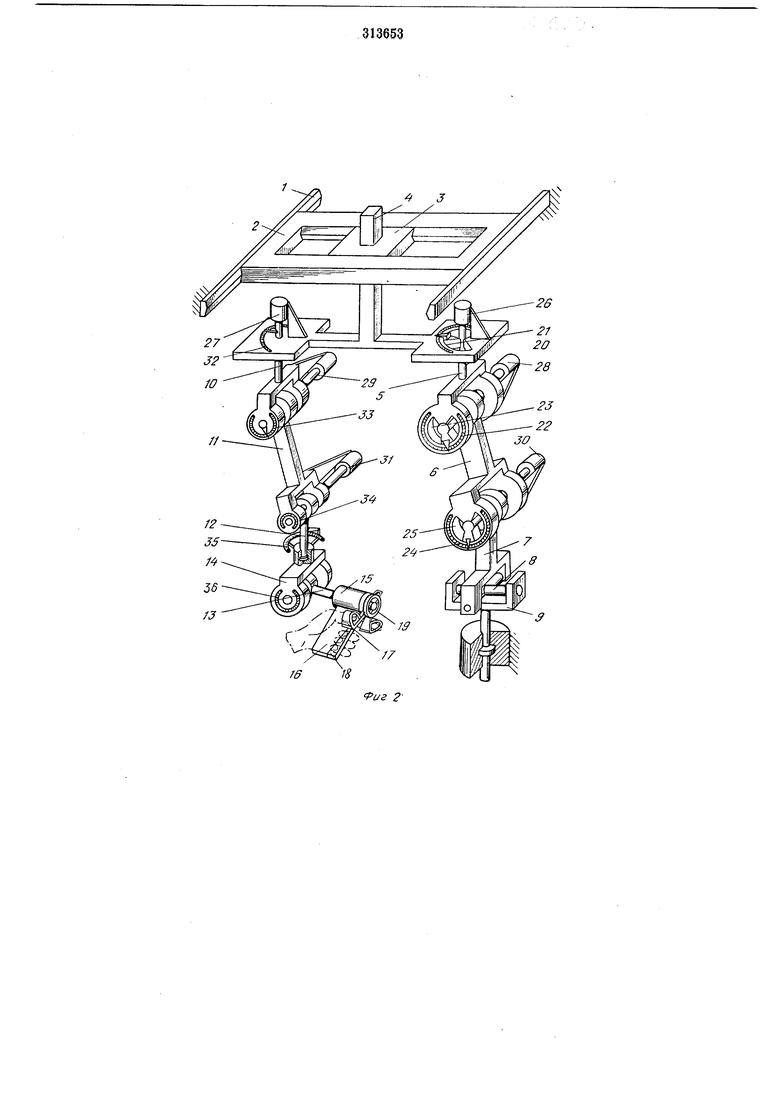
f PD-Rff 27-/fj y PD-ff j РП-Ку
J6
J7 19,
jT/ / / jf/yyV j / .
Фиг. 3
