Известны манипуляторы, задающий механизм которых не является копией исполнительного, а количество перемещений элементов задающего механизма равно количеству приводов элементов исполнительного механизма, и величина каждого из относительных перемещений элементов задающего механизма является программным значением скорости одного из приводов элементов иснолнительного механизма (астатическое управление).
Цель изобретения - облегчение управления исполнительным механизмом.
Для этого задающий механизм выполнен в виде соединенных последовательно упругой подвески с датчиками компонент перемещения или усилия рукоятки, двух карданных подвесок, первая из которых снабжена приводами перемещения ее элементов и датчиками пололсения, а вторая - датчиками положения ее элементов, и собственно рукоятки, причем оси вращения элементов карданных подвесок и рукоятки пересекаются в одной точке.
Рукоятка задающего механизма снабжена двумя соосными втулками, одна из которых при помощи упругих элементов с датчиками усилия, используемыми в системе управления скоростью вращения захвата вокруг его продольной оси, соединена с выходным звеном второй карданной подвески, а вторая, на которую непосредственно воздействует оператор.
выполнена с возможностью поворота относительно первой, и подпружиненным рычагом, обеспечивающим относительную фиксацию втулок.
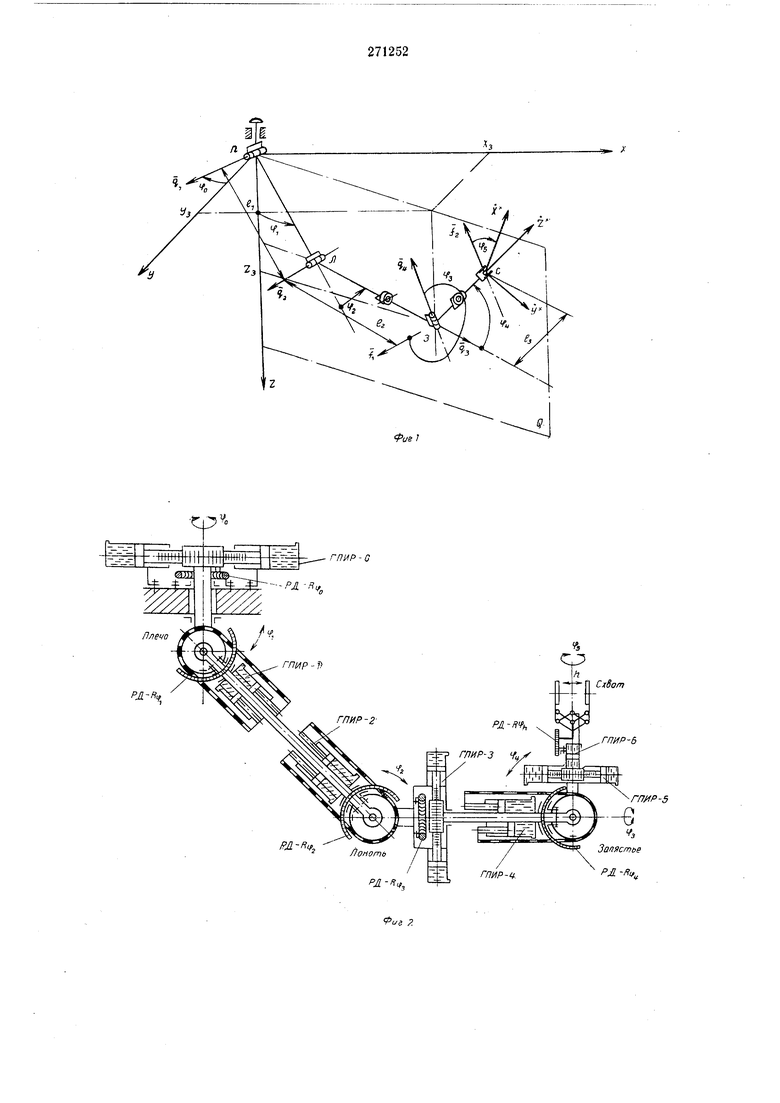
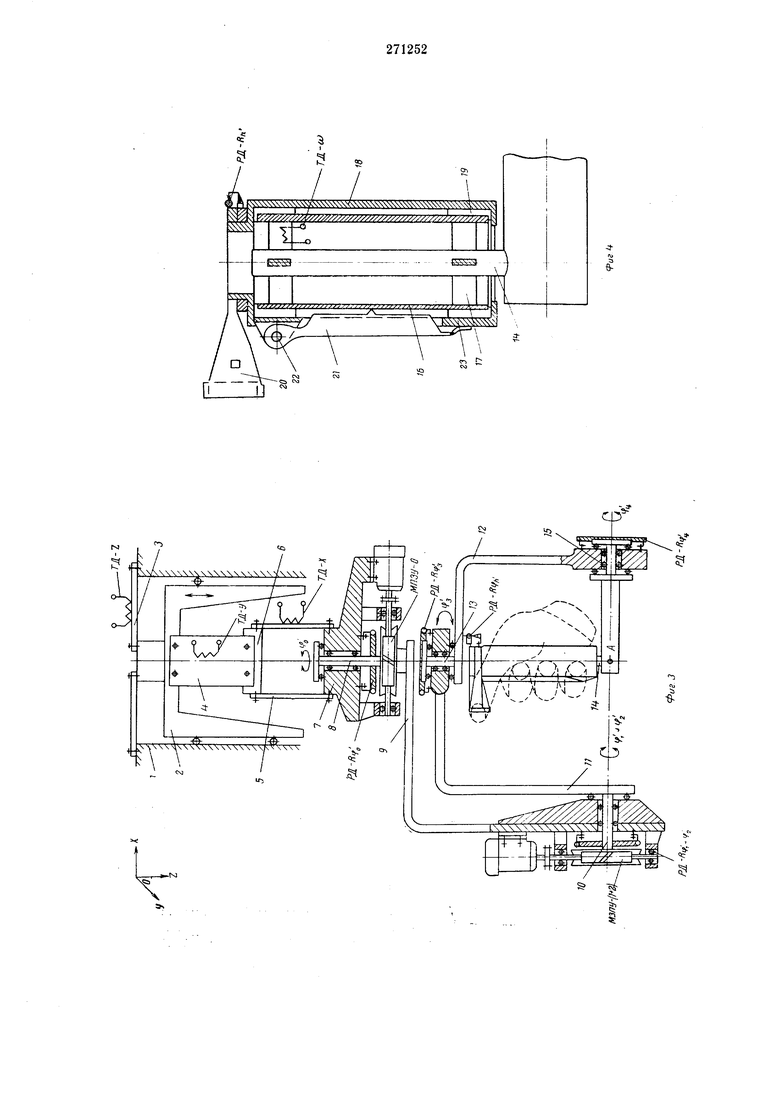
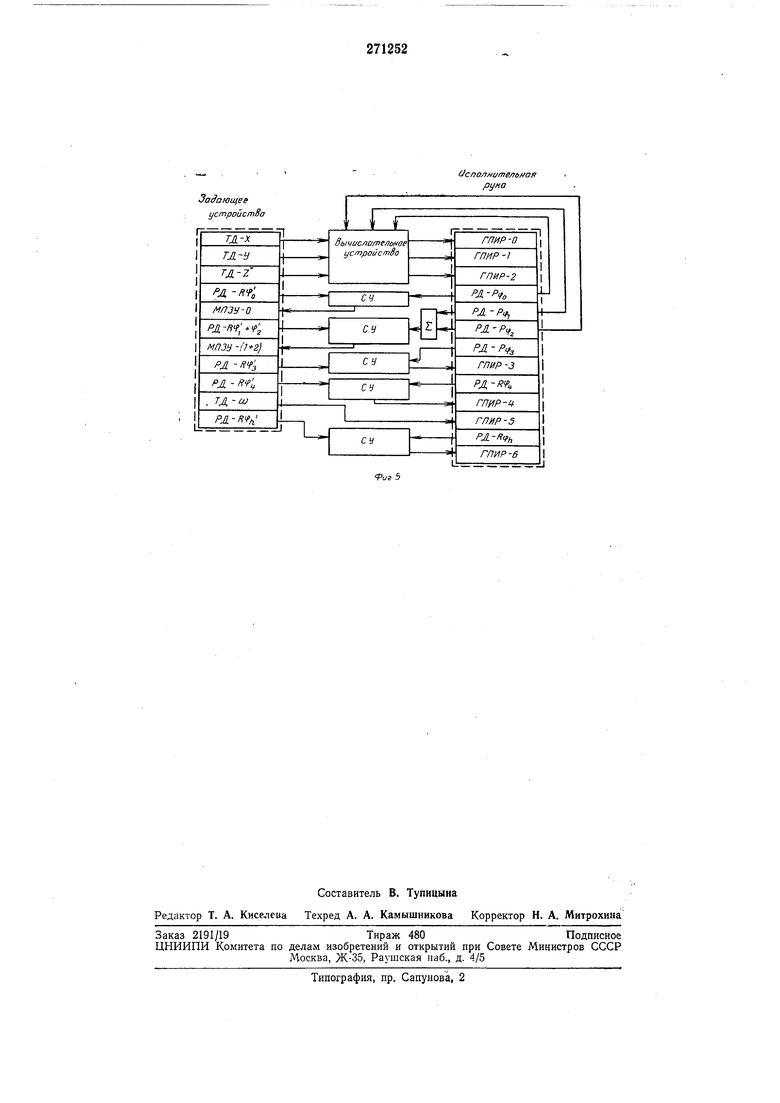
На фиг. 1 изображена кинематическая схема исполнительного .механизма; на фиг. 2 - исполнительный механизм манипулятора; на фиг. 3 - задающий механизм; на фиг. 4 - рукоятка задающего механизма; на фиг. 5-
б. блок-схема манипулятора.
Звенья исполнительного механиз.ма, обладающего се.мью степенями подвижности, включая движение схватывания, сочленены друг с другом последовательно при помощи цилиндрических вращательных пар, две из которых образуют плечо П, одна - локоть Л, три - «занястье 3 и схват С. В качестве приводов могут быть использованы любые двигатели, например гидроцилиндры ГПИР-0, 1, 2, 3, 4,5, 6 с реечной или цепной передачей. Каждый гидравлический привод снабжен гидроусилителем, питающимся от напорной магистрали. Гидроусилители приводов ГПИР-0, ГПИР-1 и ГПИР-2 должны быть выполнены с обратной
связью по расходу жидкости, обеспечивающими независимость скорости движения порщня гидроцилиндра от нагрузки, преодолеваемой приводом. Относительные положения элементов исполнительного механизма определяются
РД , РД R,,, PR R,.,. PR R 3. РД R,,, РД R,h.
Задающий механизм манипулятора состоит из упругой подвески с датчиками, например тензодатчиками, малых перемеш,ений или усилий, первой карданной подвески, снабженной приводами перемещения ее элементов и датчиками, например реостатными, их положения, второй карданной подвески, снабл енной датчиками полол ения ее элементов и рукоятки. Все эти узлы соединены друг с другом последовательно. Оси обеих карданных подвесок пересекаются в одной точке, через которую проходит и ось рукоятки.
По направляющим основаниям 1 перемещается каретка 2 упругой подвески. Каретка связана с основанием также при помощи упругого элемента 3 (пластины или мембраны) с тензодатчиком ТД-Z. К каретке крепятся упругие элементы 4 и 5 (пластины), соединенные последовательно посредством кронштейна 6 и снабженные тензодатчиками ТД-Y и ТД-Х. Все упругие элементы выполнены таким образом, что имеют невысокую жесткость только в одном из направлений, т. е. для определенного вида нагрузок. Кронштейн 7 первой карданной подвески на оси 8 несет поворотную вилку 9, которая сама является основанием, на котором укреплена ось 10 поворотной вилки
11.Относительные перемещения вилок 9 тл 11 реализуются при помощи червячных механизмов с электроприводами МПЗУ-0 и МПЗУ(1-{-2) и измеряются реостатными датчиками
РД-R и РД-R . Поворотная вилка
(т2
12второй карданной подвески укрепле}1а осью
13на поворотной вилке 11. Рычаг 14 посредством оси 15 укреплен на поворотной вилке
12.Перемещение вилки 12 и рычага 14 измеряется реостатными датчиками РД-R и
РД-R . Рукоятка, осью и основанием кото94
рой служит рычаг 14, состоит из втулки 16, укрепленной при помощи упругих пластип 17 на рычаге 14, втулки 18, связанной с втулкой 16 подшипниками скольжения 19, губок управления схватом 20. На втулке 18 крепится рычаг 21 с зубом, имеющий возможность поворота относительно оси 22. Конец рычага 21 связан с втулкой 18 упругим элементом 23, выводящим зуб рычага 21 из контакта с втулкой 16. Упругие пластины 17 снабжены тензодатчиками ГД-ш. Относительное расположение губок управления схватом 20 измеряется при помощи реостатного датчика РД-R .
га
В предлагаемом манипуляторе применено астатическое управление (управление скоростью) перемещениями точки 3 («Запястье) исполнительного механизма и позиционное управление ориентацией оси схвата. Поворот схвата вокруг собственной продольной оси осуществляется независимой системой астатического управления, а управление перемещениями губок схвата - независимое позиционное.
Рассмотрим реализацию астатического управления в предлагаемом манипуляторе.
Оператор воздействует на рукоятку задающего механизма. При этом сила воздействия, проходящая через точку пересечения осей вилок задающего механизма, воспринимается упругими элементами упругой подвески, которые прогибаются пропорционально соответствующим компонентам силы воздействия.
Обозначим через X, 7, Z - компоненты силы воздействия, проходящей через точку А пересечения осей вилок. Информацию об этих компонентах нагрузки дают датчики ГД-А, ГД-У и TR-Z. Дальнейшая задача заключается в том, чтобы обеспечить такую скорость перемещения точки 3, компоненты которой X, Y,
Z были бы пропорциональны величинам компонент нагрузок, X, Y, Z, т. е. необходимо обеспечить
X КХ, У+ ХУ, Z KZ
к - коэффициент пропорциональности.
Эта задача для выбранной кинематической схемы исполнительного механизма решается при помощи вычислительного устройства, реализующего следующие вычисления:
К (Y costpo-; slntp,)}
°/1 sin -f 1 + /2 sin ( -t- Cfo)
cp, + У Sin cp, Sin (f ,-l-cp,)+
Sintfa + ZcOS(cp, + cpj));
(A cos po+ysin9o X
92
Ilk sin tp2
XR:Sincpi + /,Sin(cp, + cp,)I + + Z /1 COS cp, + /, COS (cpi + p,)).
При этом, как показано на блок-схеме, на входы вычислительного устройства подаются сигналы КХ, KY, KZ, а сигналы, пропорциональные величинам углов фо, фь фа, с выхода вычислительного устройства снимаются сигналы, величины которых пропорциональны
0 требуемым угловым скоростям фо, ф1 и ф2, и подаются на входы гидроусилителей приводов ГПИР-0, ГПИР-1, ГПИР-2. Реализация определенных выражений (1) скоростей соответствуюшими регулируемыми приводами
исполнительного механизма ГПИР-0, 1, 2 обеспечивает одинаковую направленность и пропорциональность вектора нагрузки {X, Y, Z} на задающей рукоятке и вектора линейной скорости запястья 3 исполнительного меха0 низма {А, У, Z}.
Рассмотрим теперь позиционное управление ориентацией оси схвата исполнительного механизма в пространстве. Оно включает в себя две «прямые следящие системы и две «обЗадачей «обратных следящих систем является такое перемещение вилок 9 и // первой карданной подвески задающей рукоятки, чтобы ось 13 вилки 12 второй кардаиной подвески задающего устройства была коллипеарна оси предплечья, т. е. прямой ЛЗ, исполнительного механизма манипулятора.
С этой целью одна из «обратных следящих систем, содержащая привод МПЗУ-0 и датчики РД-R и PU-R, , призвана отслеживать -о
на задающем механизме поворотом вилки 9 угол поворота исполнительного механизма манинулятора - сро. Вторая «обратная следяп ая система, содержащая привод .Д4Я5У-(/+ 2), датчики РД-R ,/, РД-R,, РД-R f, и
сумматор сигналов датчиков РД-R -, и РД-R., ириззана отслеживать на задающем механизме попоротом вилки 1 угол поворота предплечья ЛЗ исполнительного механизма в базовой плоскости ПЛЗ, т. е. угол ф1 + фа.
Задачей «прямых следящих систем является такое относительное перемещение элементов исполнительной руки, осуществляемое приводами ГПИР-3 и ГПИР-4, чтобы обеспечить коллинеарность оси схвата исполнительный руки и оси рукоятки 15 задающего устройства.
В .соответствии с этой задачей первая «прямая следящая система, содержащая привод ГПИР-3 и датчики РД-R и РЛ-R-b, , произ 3
ВОДЯ ротацию з&пястья исполнительной руки, обеспечивает параллельность оси шарнира 3 и оси 14 поворотного рычага 15 задающего механизма.
Вторая «прямая следящая система, содержащая привод ГПИР-4 и датчики PJl-R и
PJl-R , отслеживает на исполнительном механизме угол, задаваемый относительным положением элементов 12 и М задающего устройства.
Система нозиционного управления положением губок схвата исполнительного механизма содержит реостат РД-R задающего меха4-U
низма и привод перемещения губок схвата исполнительного механизма ГПИР-6 с потенциометром РД-R.ff. Система астатического управления вращением схвата вокруг собственной продольной оси содержит датчики ГД-со, привод вращения схвата исполнительного механизма ГПИР-5. Гидроусилитель этого привода также должен иметь обратную связь по расходу жидкости.
Работает манипулятор следующим образом.
Оператор создает усилие на задающей рукоятке, в соответствии с которым перемещается запястье 3 исполнительного механизма. Одновременно на первой двойной поворотной подвеске отрабатываются углы фо и (ф1-|-ф2) в виде углов фо и (ф + ф2)- Фиксируемое или изменяемое оператором положение оси задающей рукоятки в пространстве приводит при изменении углов первой карданной подвески к изменению углов во второй (фд и ф4) подвеске, которые и отрабатываются соответствующими приводами 1 сполнительного механизма. При необходимости повернуть схват исполнительного механизма вокруг его продольной оси оператор нажимает на рычаг с зубом, фиксируя тем самым относительное положение втулок 16 и 18. Прикладывая при этом момент к втулке 18 относительно ее продольной оси, оператор нагружает пластины 17. В соответствии с сигналами датчиков ГД-со приводится во
вращение привод поворота схвата вокруг его продольной оси ГПИР-5.
В качестве вычислительного устройства могут быть использованы известные универсальные аналоговые вычислительные машины.
Предмет изобретения
1.Манипулятор, состоящий из задающего механизма с рукояткой, исполнительного механизма с индивидуальными приводами звеньев исполнительного механизма и системы астатического и позиционного управления приводами, отличающийся тем, что, с целью облегчения управления исполнительным механизмом, задающий механизм выполнен в виде соединенных последовательно упругой подвески с датчиками компонент перемещения или усилия рукоятки, двух карданных подвесок,
первая из которых снабжена приводами перемещения ее элементов и датчиками положения, а вторая - датчиками положения ее элементов, и собственно рукоятки, причем оси вращения элементов карданных .подвесок и
рукоятки пересекаются в одной точке.
2.Манипулятор по п. 1, отличающийся тем, что рукоятка задающего механизма снабжена двумя соосными втулками, одна из которых при помощи упругих элементов с датчиками
усилия, используемыми в системе управления скоростью вращения схвата вокруг его продольной оси, соединена с выходным звеном второй карданной подвески, а вторая, на которую непосредственно воздействует оператор, выполнена с возможностью поворота относительно первой, и подпружиненным рычагом, обеспечивающим относительную фиксацию втулок.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Манипулятор | 1974 |
|
SU561656A1 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Система управления дистанционным манипулятором | 1975 |
|
SU582090A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
, Л М УЧN V /Г-. Г) .
