(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1159242A1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Подручная опора адаптационная | 2023 |
|
RU2810342C1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2124447C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| Погрузчик | 1989 |
|
SU1687571A1 |
| Колесный погрузчик-штабелер | 1969 |
|
SU454160A1 |
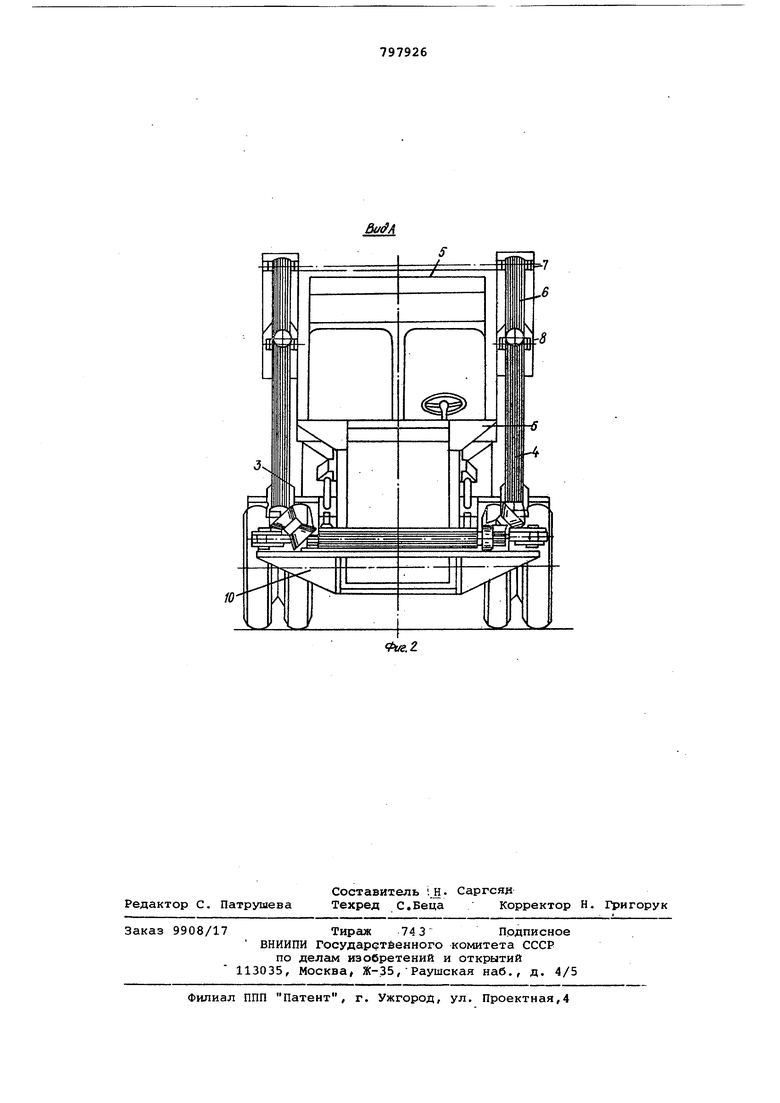
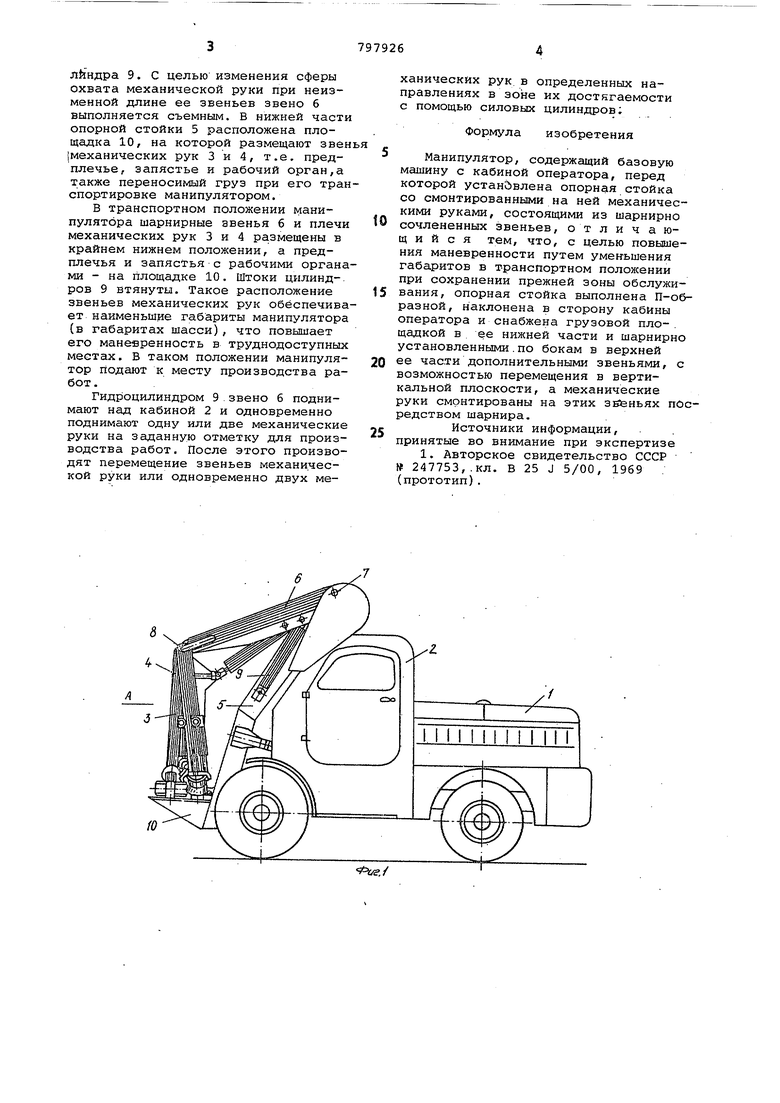
Изобретение относится к манипуля торам, предназначенным для выполнения под .емно-транспортных истроительно-монтажных операций. Известен манипулятор, содержащий базовую машину с кабиной оператора, перед которой установлена опорная стойка со смонтированными на ней механическими руками, состоящилт из шарнирно сочлененных звеньев {1J. Однако известное устройство обладает рядом недостатков: ограниченная маневренность в транспортном положении, обусловленная длиной звеньев механических рук, определяю щих сферу действия рабочего органа манипулятора; ограниченный обзор оператором обслуживающего пространства. Цель изобретения - повьвиенне маневренности путем уменьшения габаритов в транспортном положении при сохранении прежней зоны обслуживания t Поставленная цель достигается те что опорная стойка выполнена П-образной, наклонена в сторону кабины оператора и снабжена грузовой площадкой в ее нижней части и шарнирно установленными по бокам в aepjiней ее части дополнительными звеньями, с В1Ьзможностью перемещения в вертикальной плоскости, а механические, руки смонтированы на этих звеньях посредством шарнира. На фиг.1 схематически показан данипулятор в транспортном положении, общий вид; на фиг. 2 - то же, вид по стрелке А. Манипулятор состоит из подвижного основания 1 с кабиной 2 оператора и двух механических рук 3 и 4,Ксикдая из которых состоит из шарнирно соединенных звеньев - плеча, предплечья, запястья и рабочего органа. На основании 1 жестко закреплена опорная стойка 5 П-образной формы, наклоненная в сторону кабины 2.0пор ная стойка 5 несет в верхней части (для каждой механической руки) шарнирное звено.6, поворотное в вертикальной плоскости относительно шарнира 7, установленного на стойке 5 над кабиной оператора. К свободному концу каждого звена 6 с помощью универсального шарнира 8 (относящегося к плечу руки) присоединена механическая рука, а привод звена 6 осуществляется от силового цилйндра 9. С целью изменения сферы охвата механической руки при неизменной длине ее звеньев звено 6 выполняется съемным. В нижней части опорной стойки 5 расположена площадка 10, на которой размещают звен {механических рук 3 и 4, т.е. предплечье, запястье и рабочий орган,а также переносимый груз при его транспортировке манипулятором.
В транспортном положении манипулятора шарнирные звенья 6 и плечи механических рук 3 и 4 размещены в крайнем нижнем положении, а предплечья и запястья с рабочими органами - на площадке 10. Штоки цилинд-. ров 9 втянуты. Такое расположение звеньев механических рук обеспечивает наименьшие габариты манипулятора {в габаритах шасси), что повышает его маневренность в труднодоступных местах. В таком положении манипулятор подают к месту производства работ .
Гидродилиндром 9.звено 6 поднимают над кабиной 2 и одновременно поднимают одну или две механические руки на заданную отметку для производства работ. После этого производят перемещение звеньев механической руки или одновременно двух механических рук в определенных направлениях в зоне их достягаемости с помощью силовых цилиндров;
Формула изобретения
Манипулятор, содержащий базовую машину с кабиной оператора, перед которой установлена опорная стойка со смонтированными на ней механическими руками, состоящими из шарнирно сочлененных звеньев, отличающийся тем, что, с целью повышения маневренности путем уменьшения габаритов в транспортном положении при сохранении прежней зоны обслуживания, опорная стойка выполнена П-образной, наклонена в сторону кабины оператора и снабжена грузовой пло-. щадкой в ее нижней части и шарнирно установленными.по бокам в верхней ее части дополнительными звеньями, с возможностью перемещения в вертикальной плоскости, а механические руки смонтированы на этих зfiteньяx поредством шарнира.
Источники информации, принятые во внимание при экспертизе
Фс.
U
