I
Изобрегеиие огносигся к сганкостроению и предназначено для автоматизации приводов подач рабочих органов обрабатывающих станков и другого подобного рода технологического оборудования.
Известны приводы, содержащие червячно-реечные передачи с рычажными, рычажно-клиновыми и другими корректирующими механизмами 1J .
Известны также приводы подач рабочего органа, например станка, содержащий передачу, в которой ведущий элемент установлен в корпусе с возможностью поступательного перемещения, и гидро-механическое корректирующее устройство с исполнительным механизмом коррекции 2J.
Недостатками известаых приводов являются невысокие точность и надежность работы.
Цель изобретения - повышение точности привода за счет введения в передачу корректирующего устройства с высоким быст родействием, повыщение надежности привода за счет экстренного торможения в случае превыщения сигналом коррекции допус-.
тимой величины и непрерывное обеспечение этим же устройством постоянного натяга в передаче.
Это достигается тем, что исполнительный механизм корректирующего устройства выполнен в виде мембранных гидравлических механизмов, установленных между корпусом ведущего элемента передачи и рабочим органом наклонно к направлению перемещения ведущего элемента, так что схэс тавляющие усилий мембран в этом напра лении взаимно противоположны, равнодействующая усилий мембран в первоначальном положении перпендикулярна к этому перемещению и направлена в сторону неподвих ного алемента передачи, а датчики взаимодействуют с мембранами соответствующих механизмов и связаны с гидрюсистемой этих механизмов. Благодаря такому расположению червяка при его осевых перемещ ниях под воздействием изменяющейся внец1ней нагрузки встроенными датчиками вырабатывается сигнал коррекции, который пооле необходимых преобразований отрабатывается гидравлическими мембранными механиэмамн, непосредственно воздействующими на червяк н аоссгана тшвающими таким образом его заданное положениео Непрерывное и полное устранение люфгов в передаче производится этими же механизмами, осущесгвляющими как предварительный натяг необходимой величины за счет упругой деформации мембран гак и непрерывное поддержание этого предварительного натяга при изменениях как нагрузки, так и шага винтовой канавки стыкованной рейки за счет получения и обработки сигнала коррекции.
Таким образом, предлагаемая конструкЮШ следящего привода подач отличается введением корректирующего у с тройства, воздействующего непосредственно на ведущий элемент передачи-червяк, вырабатывающего и отрабатывающего необходимый сигнал коррекции и поддерживающего в передаче постоянный натяг,
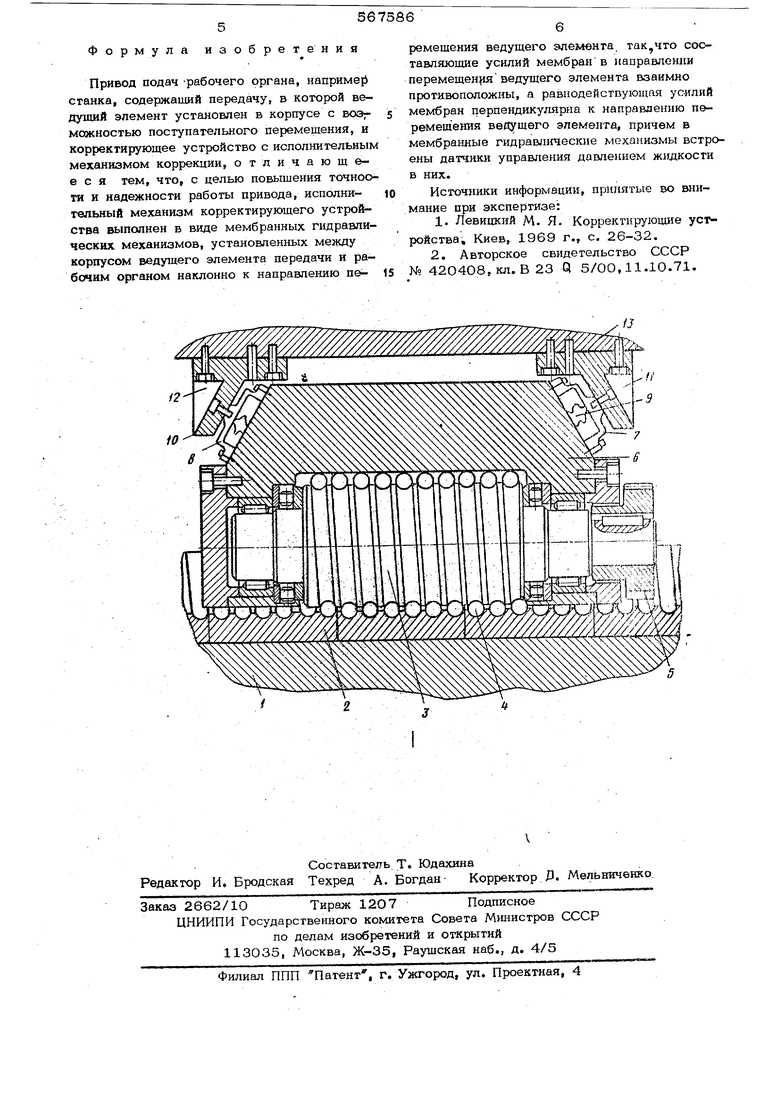
На чертеже схематически показан предлагаемый следящий привод подач червячнореечной передачей качения с корректирующим устройством в .осевом разрезе.
К неподвижной части станка 1 крепится стыкованная секционная рейка 2, имеющая винтовую канавку полусферического или ароного профиляо Ведущий элемент передачичервяк 3 с такой же канавкой соединяется с рейкой через ряд щариков 4 и приводится во вращение от исполнительного двигателя через редуктор и шестерню 5,
Червяк 3 при помощи опор качения зак решшется а kopnj ce б, имеющем внутреннюю цилиндряческую поверхность, обеспечивающую перекатывание шариков 4 вокруг червяка 3 Этот корпус 6 посредством двух гидравлических мембранных механизмов 7 и 8 со всгроенными в них датчиками давле1ша 9 а Ю и двух кронштейнов 11 и 12 аакрещшетсж на ашважном рабочем органе etaHsa 13
Предлагаемый привод работает следующим образом.
При сборке передачи мембранные механизмы 7 и 8 устанавливаю гея с предварительным натягом мегийран, превышающим все последующие перемещения червяка 3. Сигналы от обоих встроенных датчиков 9 н 1О настраиваются одинаковыми по веянчине и противоположными по знаку, так что суммарный сигнал отсутствует.
При превышении или уменьшении заданной нагрузки на рабочий орган 13 при реэ ких разгонах или торможениях, а также при изменениях щага и профиля винтовой канавки стыкованной рейки происходит перемещение червяка 3 за счет упругой деформация мембран 7 и BS в результате чего встроевтле датчики давлеаий 9 и 10 также изменяют свое первоначальное положение и вырабатывают два различающихся по величине сигнала. Суммарный сигнал, пропорциональный по величине и направлению перемещению червяка 3, служит сигналом коррекции.
Этот сигнал коррекций, преобразованный специальным гидравлическим преобразовате лем, в виде двух различных давлений ясид- кости поступает в мембранные механизмы 7 и 8, которые благодаря этому и сообщают червяку 3 дополнительные движения коррекции, восстанавливающие заданное положение червяка 3. I I
Точно так же действует эта конЬтруканя и в случае введения в систему управлений станком каких-либо приборов активного контроля, т.е. в адаптивных системах управления. В этом случае дополнительные перемещения червяка 3 осуществляются теми же мембранными механизмами 7 8 от преобра-, зованного сигнала прибора активного контроля.
Кроме того, при перемещении червяка 3 свыше установленной предельной величины, т.е. в аварийных ситуациях встроенное датчики 9 и 1О могут вырабатывать сиг нал, полностью отключающий всю систему управления и экстренно останавливать рабочий орган 13. Таким образом, эффективност использования предлагаемой конструкции заключается в следующем: возможность получения сигналов коррекции без применения сложных линейных датчиков положения рабочего особенно при его бопьишх перемещениях на длинномерных станках, что пря использовании червячно-реечной передачи качения было бы необходимо только с целью получения сигналов коррекции, тогда как для но|Яъ альной работы системы управления в этом случае достаточно простых вращающихся датчиков; повыщение точности, жесткости и чувствительности привода за сче получеиия и отработки сигнала коррекции непосредствеиио в выходной передаче, что обеспечиЕъает высокое быстродействие корректирующего воздействия; расширение возможностей системы управления путем введения адаптиш{ых систем без каких-либо других механизмов, отрабатывающих сигвалы адаптации; .повышение Надежности привода за счет обеспечения экстренной остановки рабочего органа в аварийных случаах. с высоким быстродействием; повышение срсжа службы передачи путем уменьлненяя величьины предварительного натяга до значеаня необходимого только для обеспечения тягсжого усилия и сохранения этого натяга.
Формула изобретения
Привод подач -рабочего органа, наприме14 станка, содержащий передачу, в которой ведущий элемент установлен в корпусе с воэтможностью посгупательного перемещения, и корректирующее устройство с исполнительным механизмом коррекции, отличающееся тем, что, с целью повышения точности и надежности работы привода, исполнительный механизм корректирующего устройства выполнен в виде мембранных гидравлических механизмов, установленных между корпусом ведущего элемента передачи и рабочим органом наклонно к направлению перемещения ведущего элемента,
гак,что составляющие усилий мембранв направлешш перемещении ведущего элемента взаимно противоположны, а равнодействующая усилий мембран перпендикулярна к направлению перемещения ведущего элемента, причем в мембранные гидравлические механизмы встроены датчики управления давлением жидкости в них.
Источнш и информации, принятые во внимание при экспертизе:
1. Левицкий М. Я. Корректирующие устройства; Киев, 1969 г., с. 26-32.
2. Авторское свидетельство СССР № 42О408, кл. В 23 Q 5/00,11.10.71.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод главного движения протяжного станка | 1959 |
|
SU124279A1 |
| Следящий привод подач рабочих органов | 1974 |
|
SU500010A1 |
| ЛИНИЯ ОДНОТИПНЫХ СТАНКОВ | 1973 |
|
SU366934A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ УГЛОВОГО ВЗАИМОПОЛОЖЕНИЯ ВЕДУЩЕГО И ВЕДОМОГО ВАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2088777C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| Копировальный станок | 1979 |
|
SU795898A1 |
| Гидравлический привод исполнительного органа металлорежущего станка | 1982 |
|
SU1021567A1 |
| Шариковый винтовой механизм с предварительным натягом | 1977 |
|
SU752077A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВОДОСНАБЖЕНИЕМ | 2003 |
|
RU2264652C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182086C1 |
