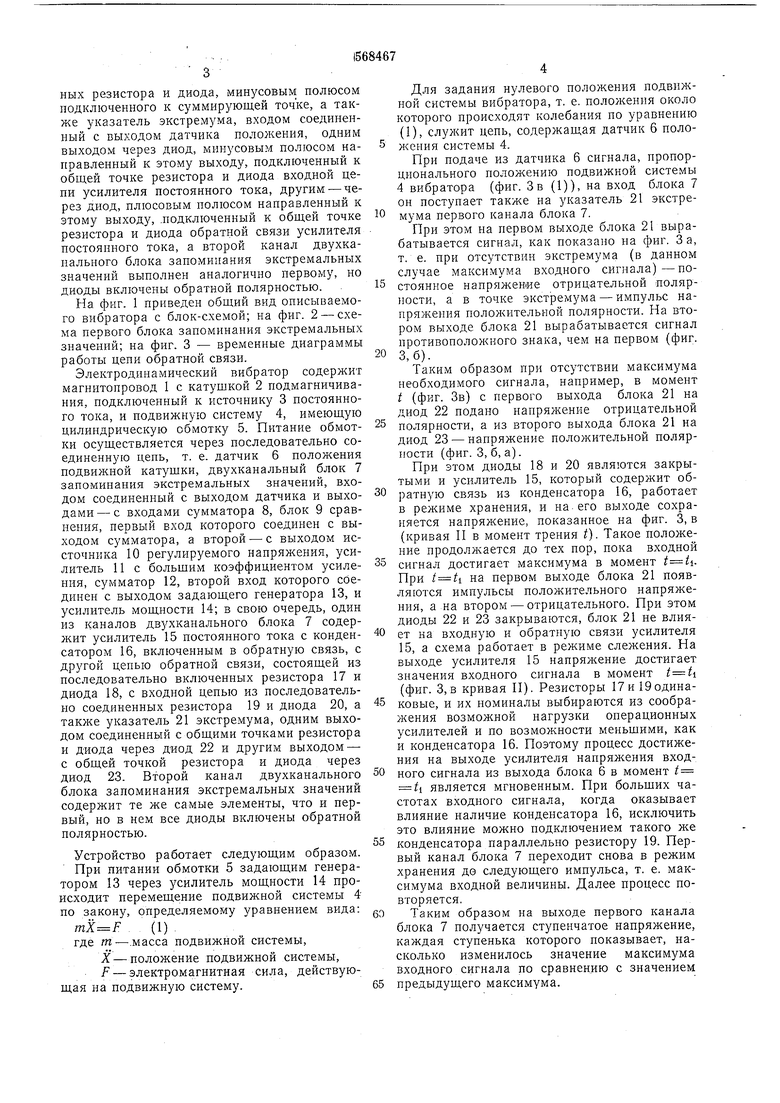
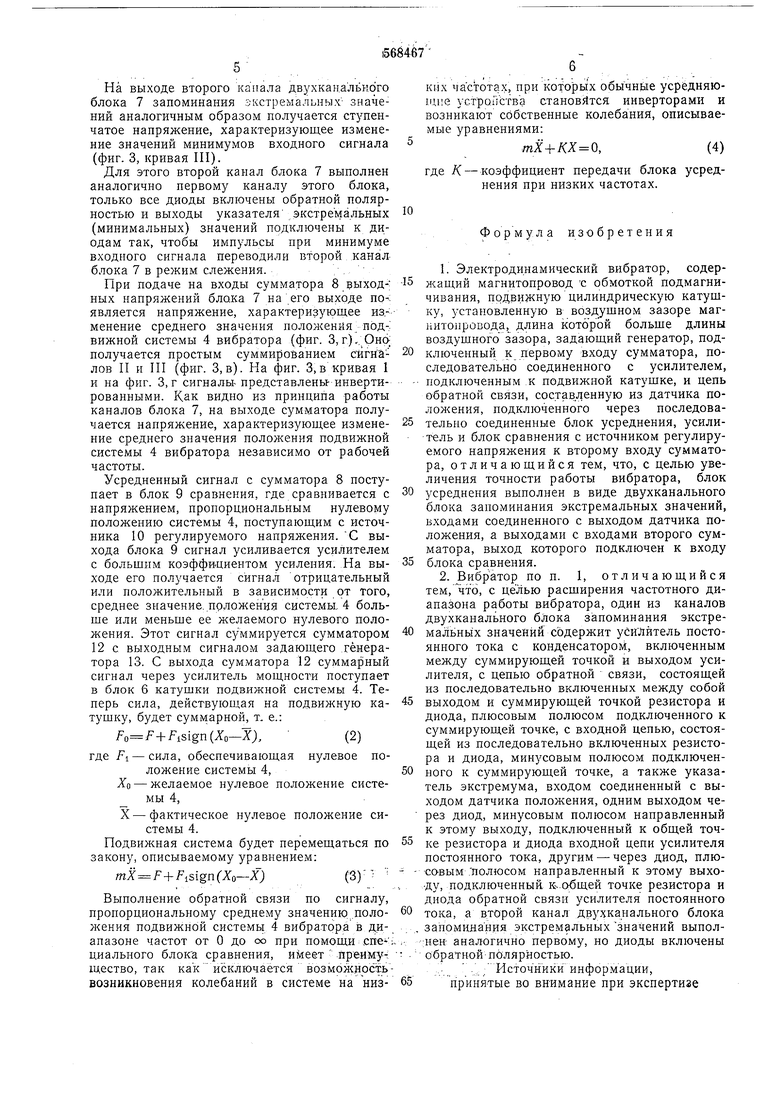
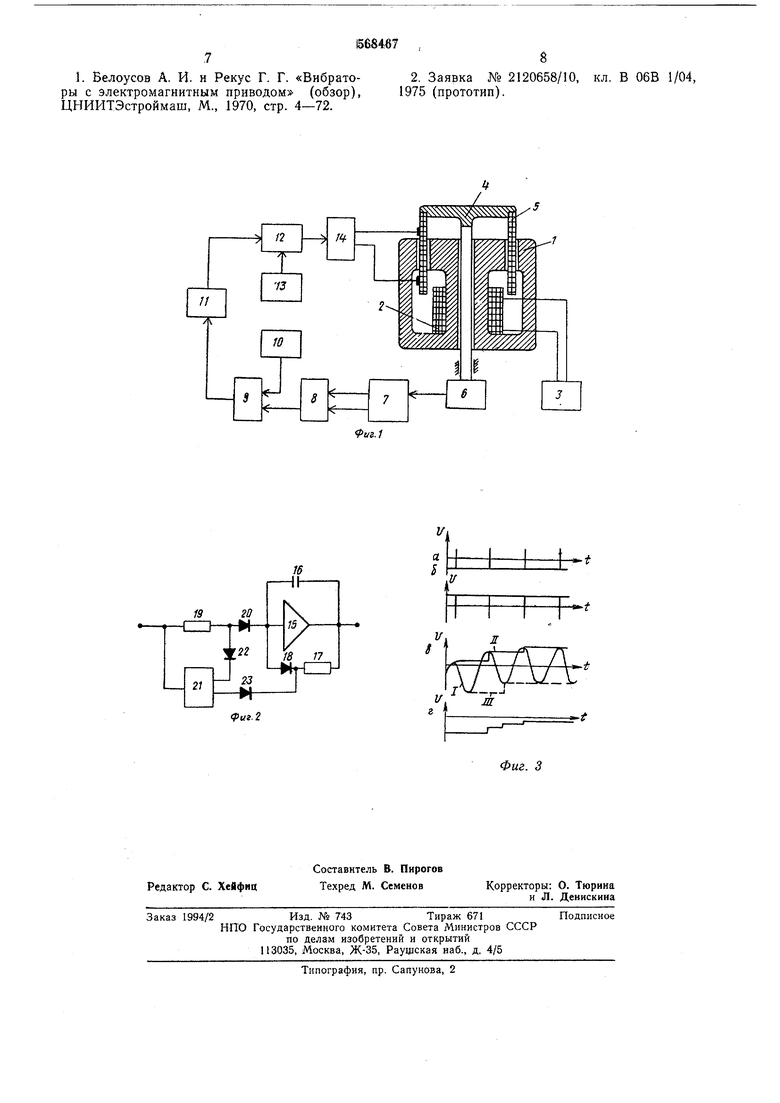
ных резистора и диода, минусовым полюсом подключенного к суммирующей точке, а также указатель экстремума, входом соединенный с выходом датчика положения, одним выходом через диод, минусовым полюсом направленный к этому выходу, подключенный к общей точке резистора и диода входной цепи усилителя постоянного тока, другим - через диод, плюсовым полюсом направленный к этому выходу, .подключенный к общей точке резистора и диода обратной связи усилителя постоянного тока, а второй канал двухкапального блока запоминания экстремальных значений выполнен аналогично первому, но диоды включены обратной полярностью. На фиг. 1 приведен общий вид описываемого вибратора с блок-схемой; на фиг. 2 - схема первого блока запоминания экстремальных значений; на фиг. 3 - временные диаграммы работы цепи обратной связи. Электродинамический вибратор содержит магнитопровод 1 с катущкой 2 подмагничивания, подключенный к источнику 3 постоянного тока, и подвижную систему 4, имеющую цилиндрическую обмотку 5. Питание обмотки осуществляется через последовательно соединенную цепь, т. е. датчик 6 положения подвижной катушки, двухканальный блок 7 запоминания экстремальных значений, входом соединенный с выходом датчика и выходами- с входами сумматора 8, блок 9 сравнения, первый вход которого соединен с выходом сумматора, а второй - с выходом иссточника 10 регулируемого напряжения, усилитель 11 с больщим коэффициентом усиления, сумматор 12, второй вход которого соединен с выходом задающего генератора 13, и усилитель мощности 14; в свою очередь, один из каналов двухканального блока 7 содержит усилитель 15 постоянного тока с конденсатором 16, включенным в обратную связь, с другой цепью обратной связи, состоящей из последовательно включенных резистора 17 и диода 18, с входной цепью из последовательно соединенных резистора 19 и диода 20, а также указатель 21 экстремума, одним выходом соединенный с общими точками резистора п диода через диод 22 и другим выходом- с общей точкой резистора и диода через диод 23. Второй канал двухканального блока запоминания экстремальных значений содержит те же самые элементы, что и первый, но в нем все диоды включены Обратной полярностью. Устройство работает следующим образом. При питании обмотки 5 задающим генератором 13 через усилитель мощности 14 происходит перемещение подвижной системы 4 по закону, определяемому уравнением вида: (1) где т-.масса подвижной системы, X-положение подвижной системы, F - электромагнитная сила, действующая на подвижную систему. Для задания нулевого положения подвил ной системы вибратора, т. е. положения около которого происходят колебания по уравнению (1), служит цепь, содержащая датчик 6 положения системы 4. При подаче из датчика 6 сигнала, пропорционального положению подвижной системы 4 вибратора (фиг. Зв (1)), на вход блока 7 он поступает также на указатель 21 экстремума первого канала блока 7. При этом на первом выходе блока 21 вырабатывается сигнал, как показано на фиг. За, т. е. при отсутствии экстремума (в данном случае максимума входного сигнала)-постоянное напряжение отрицательной полярности, а в точке экстремума - импульс напряжения пололсительной полярности. На втором выходе блока 21 вырабатывается сигнал противоположного знака, чем на первом (фиг. 3,6). Таким образом при отсутствии максимума необходимого сигнала, например, в момент t (фиг. Зв) с первого выхода блока 21 на диод 22 подано напряжение отрицательной полярности, а из второго выхода блока 21 на диод 23 - напряжение положительной полярности (фиг. 3, б, а). При этом диоды 18 и 20 являются закрытыми и усилитель 15, который содержит обратную связь из конденсатора 16, работает в режиме хранения, и на его выходе сохраняется напряжение, показанное на фиг. 3, в (кривая II в момент трения t). Такое положение продолжается до тех пор, пока входной сигнал достигает максимума в момент . При на первом выходе блока 21 появляются импульсы положительного напряжения, а на втором - отрицательного. При этом диоды 22 и 23 закрываются, блок 21 не влияет на входную и обратную связи усилителя 15, а схема работает в режиме слежения. На выходе усилителя 15 напрялсение достигает значения входного сигнала в момент (фиг. 3, в кривая П). Резисторы 17 и 19одинаковые, и их номиналы выбираются из соображения возмолсной нагрузки операционных усилителей и по возможности меньшими, как и конденсатора 16. Поэтому процесс достижения на выходе усилителя напряжения входного сигнала из выхода блока 6 в момент t ti является мгновенным. При больщих частотах входного сигнала, когда оказывает влияние наличие конденсатора 16, исключить то влияние можно подключением такого же онденсатора параллельно резистору 19. Перый канал блока 7 переходит снова в режим ранения до следующего импульса, т. е. макимума входной величины. Далее процесс поторяется. Таким образом на выходе первого канала лока 7 получается ступенчатое напряжение, аждая ступенька которого показывает, наколько изменилось значение максимума ходного сигнала по сравнению с значением редыдущего максимума.
На выходе второго капала двухканальксзго блока 7 запоминания экстремальных значений аналогичным образом получается ступенчатое напряжение, характеризующее изменение значений минимумов входного сигнала (фиг. 3, кривая III).
Для этого второй канал блока 7 выполнен аналогично первому каналу этого блока, только все диоды включены обратной полярностью и выходы указателя .экстремальных (минимальных) значений подключены к диодам так, чтобы импульсы при минимуме входного сигнала переводили второй канал блока 7 в режим слежения.. ,
При подаче на входы сумматора 8 эыход-; ных напряжений блока 7 на его выходе по-является напряжение, характеризующее изменение среднего значения положения под-: вижной системы 4 вибратора (фиг. 3, г)..,Оно; получается простым суммиройанием сйгналов II и III (фиг. 3, в). На фиг. 3, в кривая 1 и на фиг. 3, г сигналы-представлены-инвертированными. Как видно из принципа работы каналов блока 7, на выходе сумматора получается напряжение, характеризующее изменение среднего значения положения подвижной системы 4 вибратора независимо от рабочей частоты.
Усредненный сигнал с сумматора 8 поступает в блок 9 сравнения, где сравнивается с напряжением, пропорциональным нулевому положению системы 4, поступающим с источника 10 регулируемого напряжения. С выхода блока 9 сигнал усиливается усилителем с большим коэффициентом усиления. На выходе его получается сигнал отрицательный или положительный в зависимости от того, среднее значение, положения системы, 4 больще или меньше ее желаемого нулевого положения. Этот сигнал суммируется сумматором 12 с выходным сигналом задающего .генератора 13. С выхода сумматора 12 суммарный сигнал через усилитель мощности поступает в блок 6 катушки подвижной системы 4. Теперь сила, действующая на подвижную катушку, будет суммарной, т, е.:
Fo F+Fis gn(), (2)
где Pi - сила, обеспечивающая нулевое положение системы 4,
0 - желаемое нулевое положение системы 4,
X - фактическое нулевое положение системы 4.
Подвижная система будет перемещаться по закону, описываемому уравнением:
+ F,(Xo--X)(3)
Выполнение обратной связи по сигналу, пропорциональному среднему значению, .положения подвижной системы 4 вибратора в диапазоне частот от О до 00 при помощи спе-; циального блокга сравнения, ийеет преимущество, так как исключается возмож.носхьвозникновения колебаний в системе на низких частота.х, при которых обычные усредняющие устроиства становится инверторами и возникают собственные колебания, описываемые уравнениями:
(4)
тХ+КХ 0,
где /С - коэффициент передачи блока усреднения при низких частотах.
10
Формула изобретения
1.Электродинамический вибратор, содержащий магнитопровод с обмоткой подмагничивания, подвижную цилиндрическую катушку, зстановленную в воздушном зазоре магнитопровода, длина которой больше длины воздушного зазора, задающий генератор, подключенный к первому входу сумматора, последовательно соединенного с усилителем, подключенным ,к подвижной катущке, и цепь обратной связи, состав; енную из датчика положения, подключенного через последовательно соединенные блок усреднения, усилитель и блок сравнения с источником регулируемого напряжения к второму входу сумматора, отличающийся тем, что, с целью увеличения точности работы вибратора, блок
усреднения выполнен в виде двухканального блока запоминания экстремальных значений, входами соединенного с выходом датчика положения, а выходами с входами второго сумматора, выход которого подключен к входу
блока сравнения.
2.Вибратор по п. 1, отличающийся тем, что, с целью расширения частотного диапазона работы вибратора, один из каналов двухканального блока запоминания экстремальных значений содержит уСи Лйтель постоянного тока с конденсатором, включенным между суммирующей точкой и выходом усилителя, с цепью обратной связи, состоящей из последовательно включенных между собой
выходом и суммирующей точкой резистора и диода, плюсовым полюсом подключенного к суммирующей точке, с входной цепью, состоящей из последовательно включенных резистора и диода, минусовым полюсом подключенБого к суммирующей точке, а также указатель экстремума, входом соединенный с выходом датчика ноложения, одним выходом через диод, минусовым полюсом направленный к этому выходу, подключенный к общей точке резистора и диода входной цепи усилителя постоянного тока, другим - через диод, плюс&вым .полюсом направленный к этому выходу, подключенный к..0:бщей точке резистора и диода обратной связи усилителя постоянного
тока, а в.торой канал двухканального блока запоминания экстремальныхзначений выполнеп аналогично первому, но диоды включены
обратной полярностью.
. . /Источники информации,
принятые во внимание при экспертизе
1. Белоусов А. И. и Рекус Г. Г. «Вибраторы с электромагнитным приводом (обзор), ЦНИИТЭстроймаш, М., 1970, стр. 4-72.
2. Заявка № 2120658/10, кл. В 06В 1/04, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения экстремумов | 1982 |
|
SU1030735A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| Способ управления тиристорным преобразователем частоты | 1985 |
|
SU1336176A1 |
| Индикатор экстремума | 1980 |
|
SU911461A1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
| Пиковый детектор | 1979 |
|
SU864152A1 |
| Двухканальный экстремальный регулятор | 1987 |
|
SU1444713A1 |
| Измерительный преобразователь активной мощности | 1989 |
|
SU1659890A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| Устройство для управления грузоподъемным электромагнитом | 1990 |
|
SU1817144A1 |
16
V
-4-
а S
V
«риг. г
