Изобретение относится к землерой- но-транспортным машинам, а именно к бульдозерам,
Целью изобретения является новыше- ние точности управления и производительности путем более точного определения силы тяги.
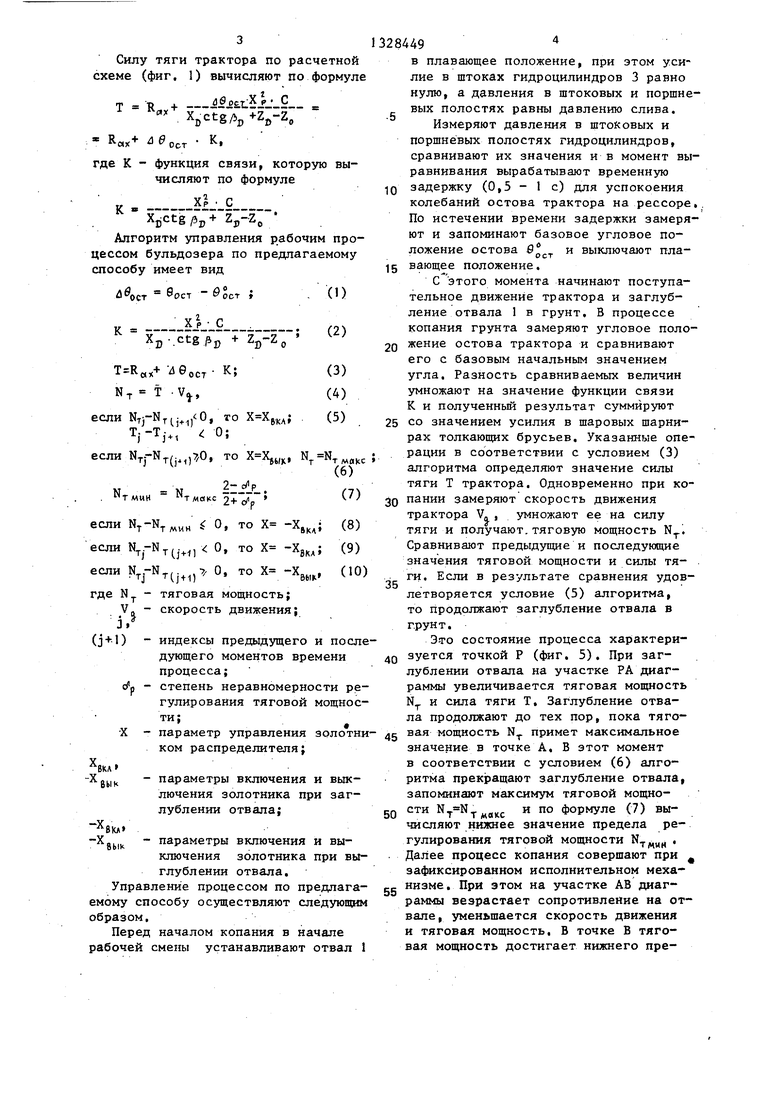
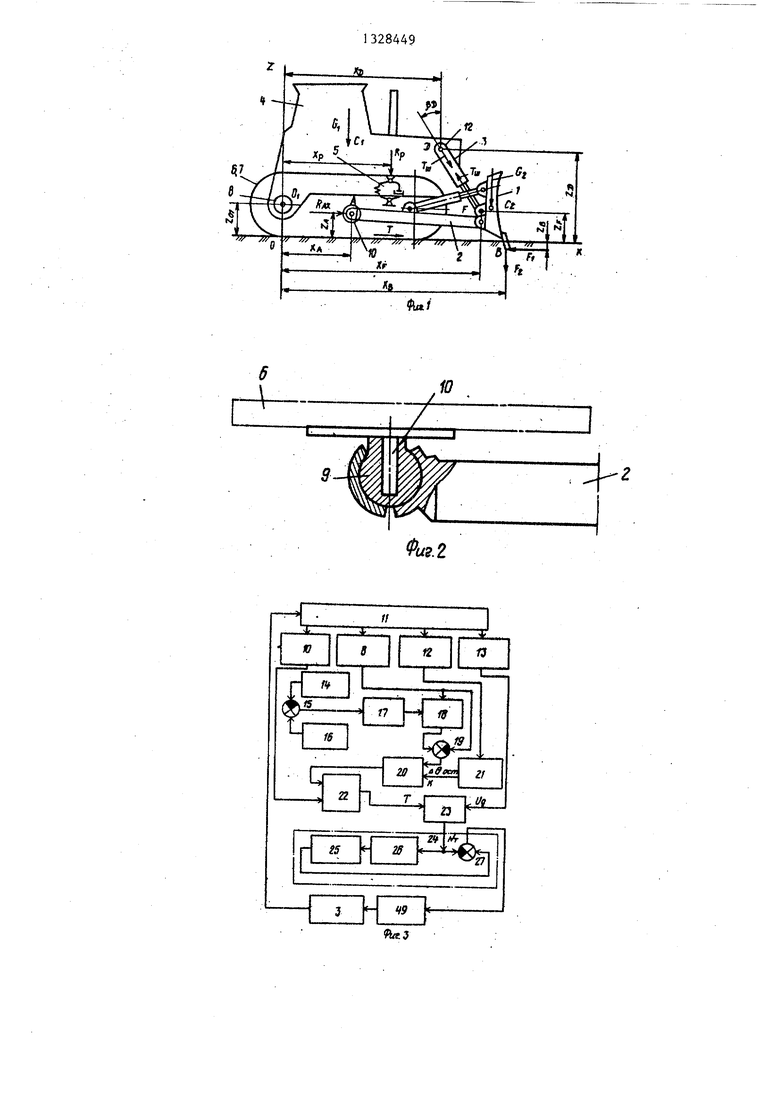
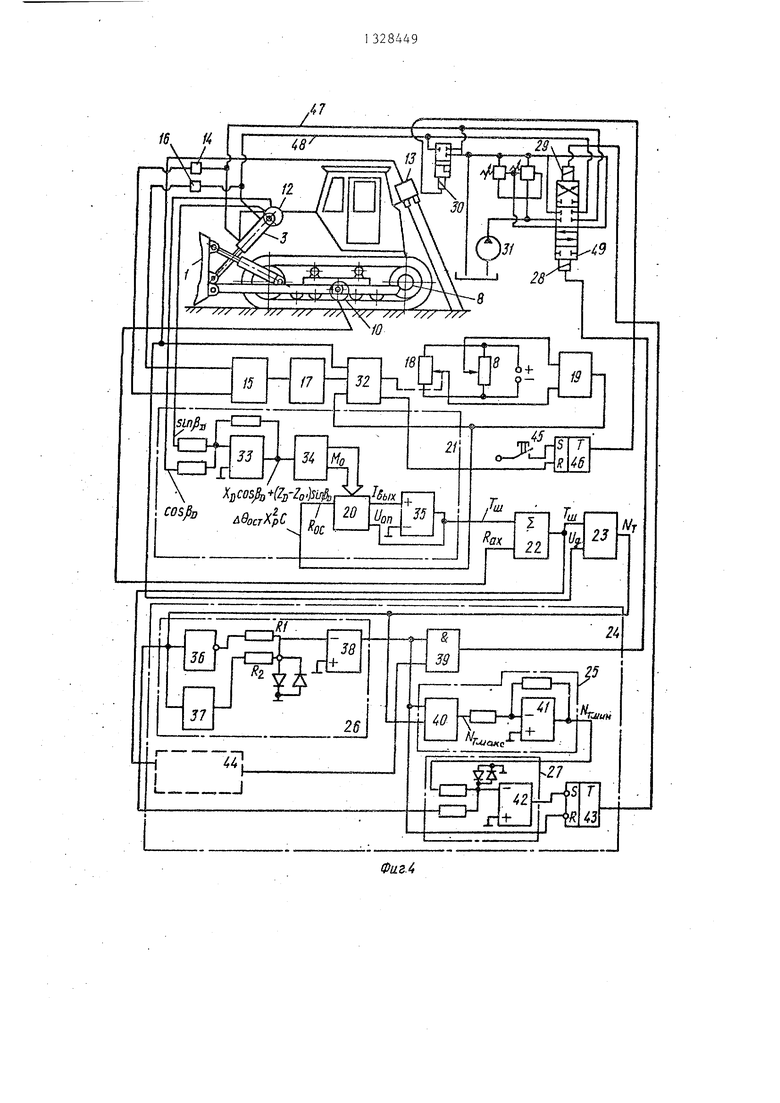
На фиг. 1 приведена расчетная схема сил, действующих на рабочее обору- дование; на фиг. 2 -- шаровой шарнир толкающего бруса на ходовой тележке трактора; на фиг, 3 - функциональная блок-схема устройства; на фиг. 4 - устройство управления рабочим процес- сом; на фиг. 5 - диаграмма управления рабочим процессом.
На фиг. 1 показаны следующие величины, поясняющие способ: G, G - силы тяжести подрессорнЬй части остова трактора и рабочего оборудования; F , F - касательная и нормальная составляющие силы сопротивления на отвале; Т - усилие в штоках; R д - горизонтальная реакция в шаровом шарнире; Т - сила тяги трактора; Rр усилие в рессоре; угол гидроцилиндра с вертикалью; Х-, Z. - координаты точек.
Отвал 1 шарнирно соединен с толка ющими брусьями 2 и исполнительными гидроцилиндрами 3, подрессоренная часть остова 4 .трактора опирается через рессору 5 на ходовые тележки 6, 7 датчик углового положения 8 остова 4 относительно ходовых тележек. На фиг, 2 показаны шаровой шарнир 9, тензодатчики 10 измерения усилий в шаровых опорах толкающих брусьев,
Функциональная блок-схема (фиг, 3 и устройство .(фиг, 4) содержат объект 11 управления (бульдозер )„ включающий отвал I, остов 4, тележки 6 и 7 датчик 12 углового положения гидро- цилиндра, датчик 13 скорости движени (например, доплеровского типа), датчик 14 давления в штрковых полостях, сумматоры 15,19,27 и 22, датчик 16 давления в поршневых полостях, блок 17 задержки, блок 18 запоминания базового угла, умножители 20 и 23, бло 21 формирования функции связи, экстремальный регулятор 24, содержащий блок 25 формирования сигналов управления, блок 26 поиска экстремума .тяговой мощности и сумматор 27, исполнительный механизм 3;, электрогидро- распределитель 49„
0
.
0
Q
5
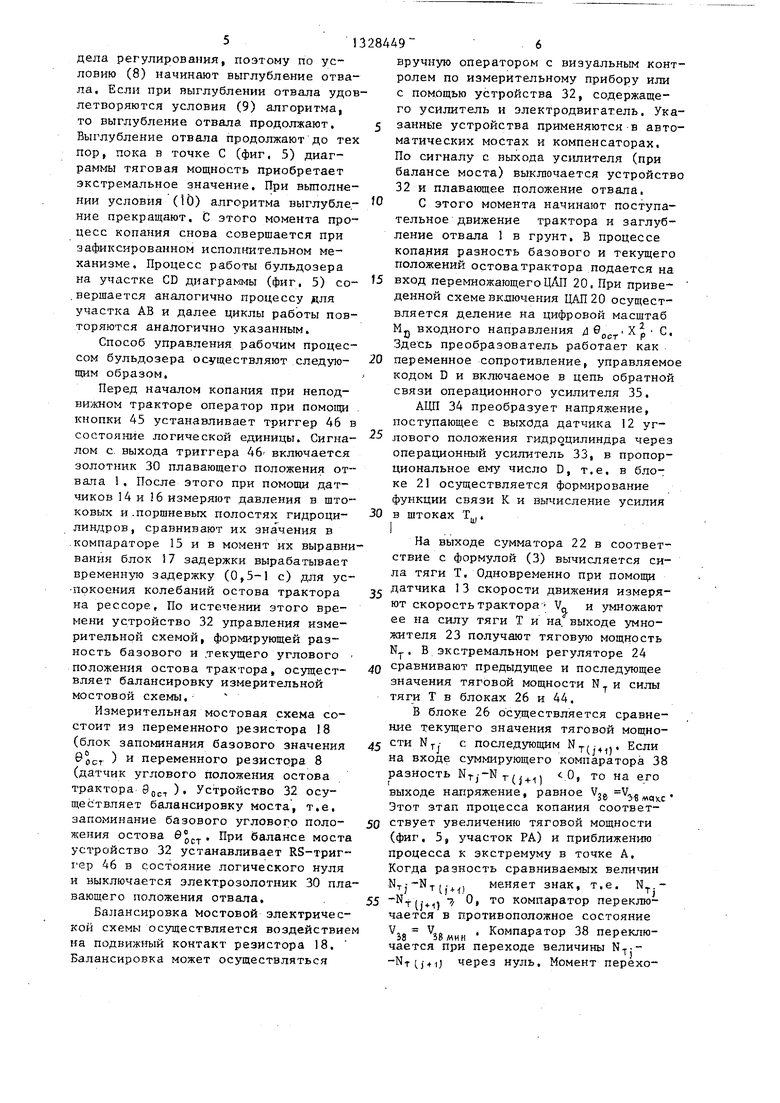
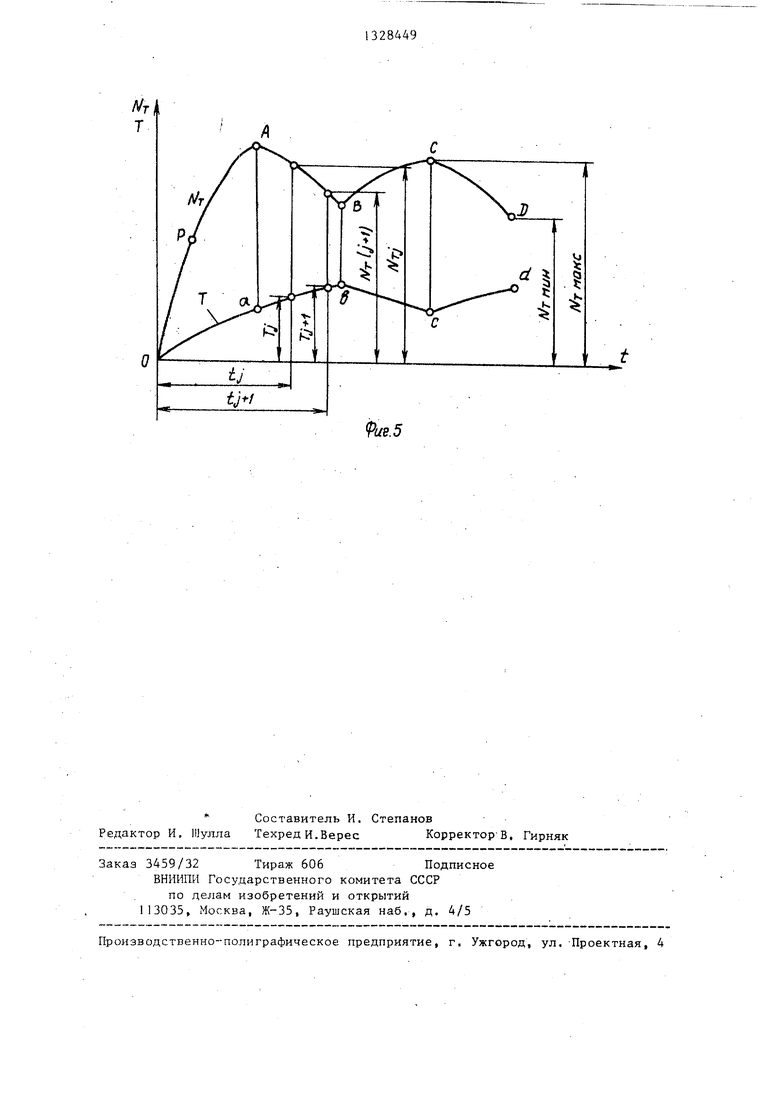
Кроме того, устройство (фиг, 4) содержит распределитель 30 плавающего положения отвала, насос 31, устройство 32 управления .измерительной схемой, усилители 33,35,36 и 41, аналого-цифровой преобразователь (АЦП) 34, умножающий цифроаналоговый преобразователь (ЦАП) 20, линию 37 задержки, компараторы 38 и 42, логический элемент И 39, устройство 40 выборки- хранения, RS-триггеры 43 и 46, блок 44 сравнения значений силы тяги, кнопку 45, гидромагистрали 47 и 48, соединяющие электрогидрораспредели- тель 49 с гидроцилиндрами 3, На фиг, 5 показана диаграмма изменений тяговой мощности и силы тяги Т,
Расчетная схема (фиг. 1) позволяет с помощью системы управления по результатам измерения датчиками информационных параметров вычислить усилие в штоках гидроцилиндров в процессе копания грунта
„, бостХ С
TUJ
Xj,,+ (,)sin/3j,
где С - коэффициент жесткости рее-
соры.
При этом знак усилия в штоках (растяжение, сжатие) однозначно зависит от знака относительного отклонения остова от базового положения
авосг SOCT
где в, &1сг текущее и базовое заданное начальное положение остова трактора относительно ходовых тележек.
Базовое исходное положение остова трактора фиксируется при плавающем положении гидроцилиндров и неподвижном тракторе. При этом условии усилие в штоках , горизонтальная реакция в шаровом шарнире Ra О, касательная сила на отвале F, О, угловое положение остова трактора фиксируется как исходное начальное значение Эрст 0°j. , усилие в рессоре равно начальному усилию ,
Начальное усилие в рессоре определяют по формуле
Хс-1 Р
т, о . р iJS.1 D Л V
Р
где X , X - координаты точки С и рессоры.
Силу тяги трактора по расчетной схеме (фиг. 1) вычисляют по формуле
Т -о + -J JSC-L JL:-
- ,ьZ,-Z„
- Я„,+ 4 ост 5.
где К - функция связи, которую вычисляют по формуле
К
ХР . С
XjjCtg ftj, + Zj,-Z,
Алгоритм управления рабочим процессом бульдозера по предлагаемому способу имеет вид
ост осг t
. (1)
ХР с
17 -: -« - /о
Xj,..ctgpp f ,
,+ 400СТ- К;(3)
NT Т -V,(4)
если NTJ-N,J,,O, то .,,; (5) Tj-Tj4, 0;
если NTj-N Q,,7,0, то ,, ,,
(6)
2-
М N J .f7
. тмми 2+сУр
если NT-NT, О, ТО Х (8)
если .,, О, то Х -Xg,,;(9)
если N,-N.,7, 0. то Х -Х,,,(10)
где N - тяговая мощность; Vj, - скорость движения;
J
(J+1) - индексы предыдущего и последующего моментов времени процесса;
d p - степень неравномерности регулирования тяговой мощности;
X - параметр управления золотником распределителя;
-Xgy - параметры включения и выключения золотника при заглублении отвала;
ВКл
8ык параметры включения и выключения золотника при вы- глублении отвала. Управление процессом по предлагаемому способу осуществляют следующим образом.
Перед началом копания в начале рабочей смены устанавливают отвал 1
28449
в плавающее положение, при этом усилие в щтоках гидроцилиндров 3 равно нулю, а давления в щтоковых и порщне- вых полостях равны давлению слива, Измеряют давления в щтоКовых и порщневых полостях гидроцилиндров, сравнивают их значения и в момент выравнивания вырабатывают временную
Q задержку (0,5 - 1 с) для успокоения колебаний остова трактора на рессоре,. По истечении времени задержки замеряют и запоминают базовое угловое положение остова вд и выключают пла15 вающее положение,
С этого момента начинают поступательное движение трактора и заглубление отвала 1 в грунт, В процессе копания грунта замеряют угловое поло0 жение остова трактора и сравнивают его с базовым начальным значением угла. Разность сравниваемых величин умножают на значение функции связи К и полученный результат суммируют
25 со значением усилия в щаровых щарни- рах толкающих брусьев. Указанные операции в соответствии с условием (3) алгоритма определяют значение силы тяги Т трактора. Одновременно при ко30 пании замеряют скорость движения трактора V., умножают ее на силу тяги и получают.тяговую мощность N. Сравнивают предыдущие и последующие значения тяговой мощности и силы тя- ги. Если в результате сравнения удовлетворяется условие (5) алгоритма, то продолжают заглубление отвала в г.рунт.
Это состояние процесса характери0 зуется точкой Р (фиг, 5), При заглублении отвала на участке РА диаграммы увеличивается тяговая мощность N и сила тяги Т, Заглубление отвала продолжают до тех пор, пока тяго4g вая мощность N примет максимальное значение в точке А, В этот момент в соответствии с условием (6) алгоритма прек1ращают заглубление отвала, запоминают максимум тяговой мощноQ сти , и по формуле (7) вычисляют нижнее значение предела регулирования тяговой мощности Далее процесс копания соверщают при зафиксированном исполнительном механизме. При этом на участке АВ диаг- рам1«п 1 веэрастает сопротивление иа отвале, уменьщается скорость движения и тяговая мощность, В точке В тяговая мощность достигает нижнего пре35
дела регулирования, поэтому по условию (8) начинают выглублвние отвала. Если при выглублении отвала удовлетворяются условия (9) алгоритма, то выглубление отвала продолжают. Выглубление отвала продолжают до тех пор, пока в точке С (фиг, 5) диаграммы тяговая мощность приобретает экстремальное значение. При вьшолне- нии условия (10) алгоритма выглубление прекращают, С этого момента процесс копания снова совершается при зафиксированном исполг-ттельном механизме. Процесс работы бульдозера
вручную оператором с визуальным контролем по измерительному прибору или с помощью устройства 32, содержащего усилитель и электродвигатель. Ука- 5 занные устройства применяются в автоматических мостах и компенсаторах. По сигналу с выхода усилителя (при балансе моста) выключается устройство 32 и плавающее положение отвала, JO С этого момента начинают поступательное движение трактора и заглубление отвала 1 в грунт, В процессе копания разность базового и текущего положений остоватрактора подается на
на участке CD диагракмы (фиг, 5) со- -5 вход перемножающегоЦАП 20. При приве- .вершается аналогично процессу для денной схеме включения ЦАП20 осущест- участка АВ и далее циклы работы пов- вляется деление на цифровой масштаб
М
теряются аналогично указанным.
Способ управления рабочим процессом бульдозера осуществляют следую- пщм образом.
Перед началом копания при непод- виж ном тракторе оператор при помощи кнопки 45 устанавливает триггер 46 в
n входного направления лб.Хр
С,
Здесь преобразователь работает как 20 переменное сопротивление, управляемое кодом D и включаемое в цепь обратной связи операционного усилителя 35, АЦП 34 преобразует напряжение, поступающее с выхода датчика 12 угсостояние логической единицы, Сигна- лового положения гидроцилиндра через лом с выхода триггера 46 включается операционный усилитель 33, в пропорциональное ему число D, т.е, в блоке 21 осуществляется формирование функции связи К и вычисление усилия 30 в штоках Т„,,
золотник 30 плавающего положения отвала 1, После этого при помощи датчиков 14 и 16 измеряют давления в што- ковых и .поршневых полостях гидроцилиндров, сравнивают их значения в компараторе 15 и в момент их выравнивания блок 17 задержки вырабатывает временнуго задержку (0,5-1 с) для ус- пркоения колебаний остова трактора на рессоре, По истечении этого времени устройство 32 управления измерительной схемой, формирующей разность базового и .текущего углового положения остова трактора, осуществляет балансировку измерительной мостовой схемы.
Измерительная мостовая схема состоит из переменного резистора 18 (блок запоминания базового значения . ) и переменного резистора 8 (датчик углового положения остова трактора BQCT ) Устройство 32 осу- щес твляет балансировку моста, т,е, запоминание базового углового положения остова брст Р балансе моста устройство 32 устанавливает RS-триг- 1 ер 46 в состояние логического нуля и выключается электрозолотник 30 плавающего положения отвала.
Балансировка мостовой электрической схемы осуществляется воздействием на подвижный контакт резистора 18, Балансировка может осуществляться
На выходе сумматора 22 в соответствие с формулой (3) вычисляется сила тяги Т, Одновременно при помощи
э датчика 13 скорости движения измеряют скорость трактора У„ и умножают ее на силу тяги Т и на. выходе умножителя 23 получают тяговую мощность N.J.. В экстремальном регуляторе 24
0 сравнивают предыдущее и последующее значения тяговой мощности силы тяги Т в блоках 26 и 44,
В блоке 26 осуществляется сравнение текзтцего значения тяговой мощно45 сти NT-J с последующим Если на входе суммирующего компаратора 38 разность NT-J-N г (j.) 0, то на его выходе напряжение, равное ъ уъ Этот этап процесса копания соответ50 ствует увеличению тяговой мощности (фиг, 5, участок РА) и приближению процесса к экстремуму в точке А, Когда разность сравниваемых величин .NTJ-NT-J.J меняет знак, т,е, N.55 N(. 7/ О, то компаратор переключается в противоположное состояние
,„ V.. , Компаратор 38 переклю58 р WHН
чается при переходе величины -NT(.J + O через нуль. Момент перехо28449 6
вручную оператором с визуальным контролем по измерительному прибору или с помощью устройства 32, содержащего усилитель и электродвигатель. Ука- 5 занные устройства применяются в автоматических мостах и компенсаторах. По сигналу с выхода усилителя (при балансе моста) выключается устройство 32 и плавающее положение отвала, JO С этого момента начинают поступательное движение трактора и заглубление отвала 1 в грунт, В процессе копания разность базового и текущего положений остоватрактора подается на
М
n входного направления лб.Хр
С,
Здесь преобразователь работает как переменное сопротивление, управляемое кодом D и включаемое в цепь обратной связи операционного усилителя 35, АЦП 34 преобразует напряжение, поступающее с выхода датчика 12 угНа выходе сумматора 22 в соответствие с формулой (3) вычисляется сила тяги Т, Одновременно при помощи
датчика 13 скорости движения измеряют скорость трактора У„ и умножают ее на силу тяги Т и на. выходе умноителя 23 получают тяговую мощность N.J.. В экстремальном регуляторе 24
сравнивают предыдущее и последующее значения тяговой мощности силы тяги Т в блоках 26 и 44,
В блоке 26 осуществляется сравнение текзтцего значения тяговой мощности NT-J с последующим Если на входе суммирующего компаратора 38 разность NT-J-N г (j.) 0, то на его выходе напряжение, равное ъ уъ Этот этап процесса копания соответствует увеличению тяговой мощности (фиг, 5, участок РА) и приближению процесса к экстремуму в точке А, Когда разность сравниваемых величин .NTJ-NT-J.J меняет знак, т,е, N.(. 7/ О, то компаратор переключается в противоположное состояние
,„ V.. , Компаратор 38 переклю58 р WHН
чается при переходе величины -NT(.J + O через нуль. Момент перехода величины (-. через нуль и переключение выходгюго налряжения компаратора 38 соответствует экстремальному значению тяговой мощности.
При переключении компаратора
Nr/ Nj(,4i) R2
Таким образом, сравниваемые напряжения должны иметь противоположные знаки. Для этой цели служит, инвертирующий усилитель 36, Линия 37 задержки необходима для формирования сигнала. N,, Блок 44 построен аналогично.
Заглубление отвала в грунт продол- жается до выполнения условия (6) алгоритма. В момент срабатывания условия (6) на выходе логического элемента И 39 устанавливается уровень логического нуля, который и вьпслючает распределитель 49. В момент переключения компаратора 38 в устройстве 40 выборки-хранения осуществляется запоминание максимального значения тяговой мощности N ,
Нижний предел регулирования тяговой мощности Н ;, вычисляется по формуле (7), Вычисление осуществляется при помощи инвертирующего усилителя 41 с коэффициентом передачи т, равным
m
R4 R3 2+с/р
с/р - степень неравномерности ре- гулирования, является величиной постоянной, выбираемой в пределах п 0,05- 0,15.
1 NTM«KC f;-5; -NTMc..c
Далее процесс копания осуществляется при зафиксированном исполнительном гидромеханизме. При этом на участке АВ диагр аммь: (фиг. 5) возрастают сопротивления на отвале, уменьшается скорость движения трактора, снижается тяговая мощность, В точке В тяговая мощность достигает нижне- го предела регулирования,По условию (8) сигналом с компаратора 27 триггер 43 устанавливается в единичное состояние и включается распределитель 49 на выглубление отвала . Выг- лубление отвала продолжают до тех пор, пока в точке С (фиг. 5) диаграммы тя говая мощность преобретет экстремальное значение. При выполнес
fO
/5 20 25
30
0
5 0
нии условия (10) сигналом с выхода компаратора 38 триггер 43 устанавливается в состояние логического нуля, выключается распределитель 49 и выглубление отвала прекращается. С этого момента процесс копания снова совершается при зафиксированном исполнительном гидромеханизме, Процесс работы бульдозера на участке CD диаграммы (фиг. 5) совершается аналогично процессу на участке АВ и далее циклы работы повторяются аналогично указанным,
Фор мула изобретения
Способ управления рабочим процессом бульдозера, включающий измерение усилий в шарнирах толкающих брусьев, измерение действительной скорости движения, определение текущей тяговой мощности, поиск экстремума тяговой мощности и сравнение -ее с текущей, а по отклонению - формирование управляющего сигнала на перемещение отвала, о тличающийся тем, что, с целью повышения точности управления и производительности путем более точного определения силы тяги, дополнительно измеряют угловое положение гидроцилиндров отвала д , давления в штоковых и поршневых полостях этих гидроцилиндров, которые сравнивают, и в момент их равенства вырабатывают сигнал задержки, по истечении которого запоминают базовое значение угла положения остова В бульдозера относительно ходовых тележек, измеряют текущее значение б-„ положения остова бульдоW VT
зера относительно ходовых тележек, сравнивают эти значения и разность этих величин умножают на значение функции связи, которое определяют по формуле
К
с
Хэ cteft + ZQ-ZC
Y у i
где D Р Ь. 2о I
- координаты точек на
фиг. 1;
С - коэффициент жесткости
рессоры; р - угол гидроцилиндров с
вертикалью,
полученное значение суь мируют с величиной усилия в шарнирах толкающих брусьев бульдозера для определения силы тяги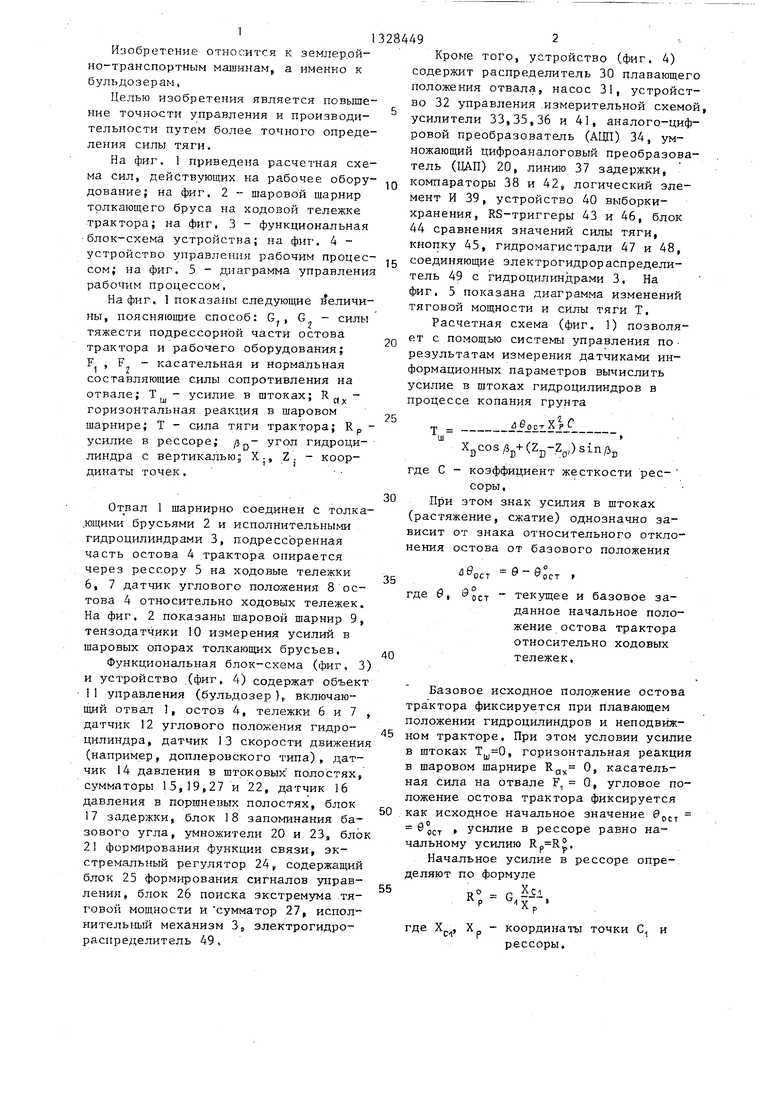
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом копания | 1985 |
|
SU1307041A1 |
| БУЛЬДОЗЕР С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ ОТВАЛОМ | 1991 |
|
RU2014400C1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1239233A1 |
| Способ управления бульдозером и устройство для его осуществления | 1985 |
|
SU1339285A1 |
| Бульдозер | 1985 |
|
SU1330274A1 |
| Система управления рабочим процессом землеройно-транспортной машины | 1985 |
|
SU1283313A1 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU941503A1 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Способ регулирования рабочих процессов землеройно-транспортных машин | 1974 |
|
SU569683A1 |
Изобретение относится к земле- ройно-транспортной технике и позволяет повысить точность управления и производительность путем более точного определения силы тяги (СТ), Для этого перед началом процесса копания измеряют угловое положение гидроцилиндров отвала и давления в их штоко- вых и поршневых полостях и сравнивают их, В момент выравнивания давлений в полостях гидроцилиндров (при плавающем положении отвала) вырабатывй- ют сигнал задержки. По истечении времени задержки замеряют положение остова трактора, В процессе копания грунта замеряют угловое положение остова трактора относительно ходовых тележек и сравнивают его с -базовым. Полученную разность умножают на значение функции связи, и результат суммируют со значением усилия в шаровых шарнирах толкающих брусьев для опре- деления СТ, Одновременно измеряют скорость движения трактора, умножают ее на СТ и получают тяговую мощность (ТМ), Осуществляют поиск экстремума ТМ и сравнение ее с текущей. ТМ. По сигналу рассогласования формируют управляющий сигнал на перемещение от- . вала, 5 ил. СЛ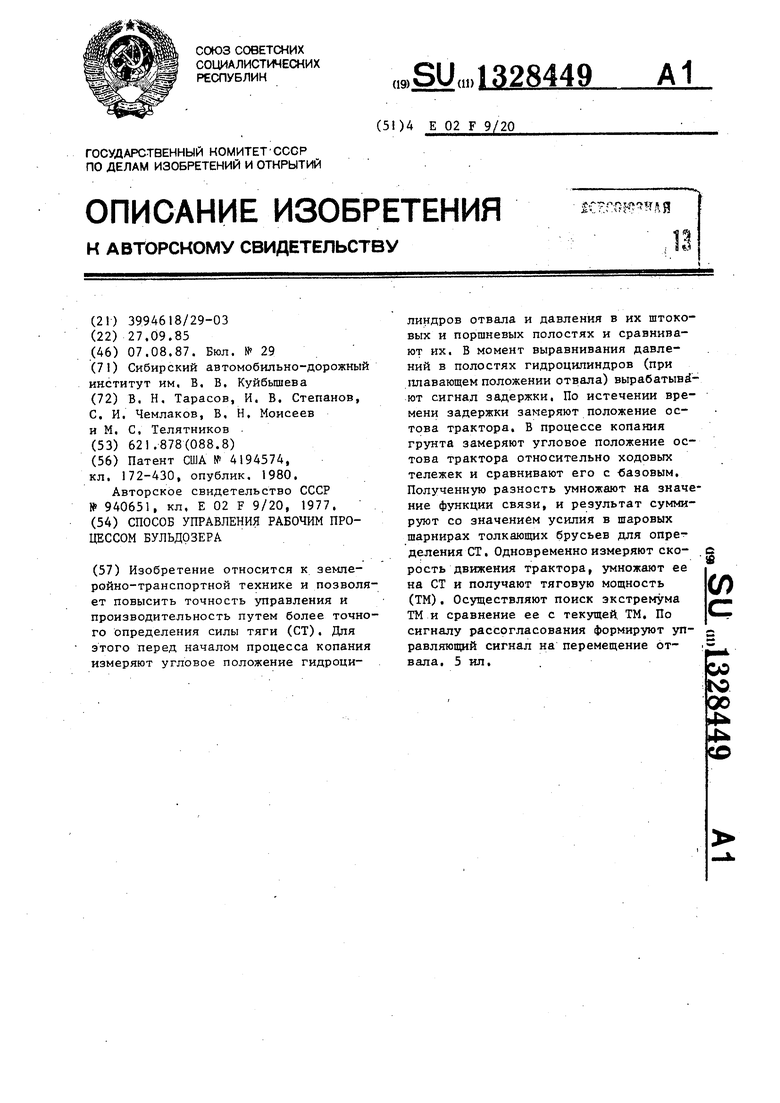
Й/г.2
(pus. 5
| Патент США №4194574, кл, 172-430, опублик, 1980, Авторское свидетельство СССР № 940651, кл, Е 02 F 9/20, 1977, |
