I
Изобрегение относится к гидравлическим приводам.
Известен дискретный реверсивный гидропривод, содержащий дозировочный насос, сообщенный с рабочей камерой исполнительного гидроцилиндра, и регулятор хода поршней насоса fl.
Недостаток известных приводов заключается в недостаточной точности обработки сигнала управления, особенно при переменных рабочих нагрузках и малых скоростях движения исполнительного гидроиилиндра.
Целью изобретения является расширение функциональных возможностей гидропривода.
Для этого в предлагаемом гидроприводе дозировочный насос вьшолнен в виде двух цилиндров с последовательно соединенными рабочими камерами гндролинией, снабженной обрат ными клапанами и постоянно связанной с рабочей камерой исполнительного гидроцилиндра«
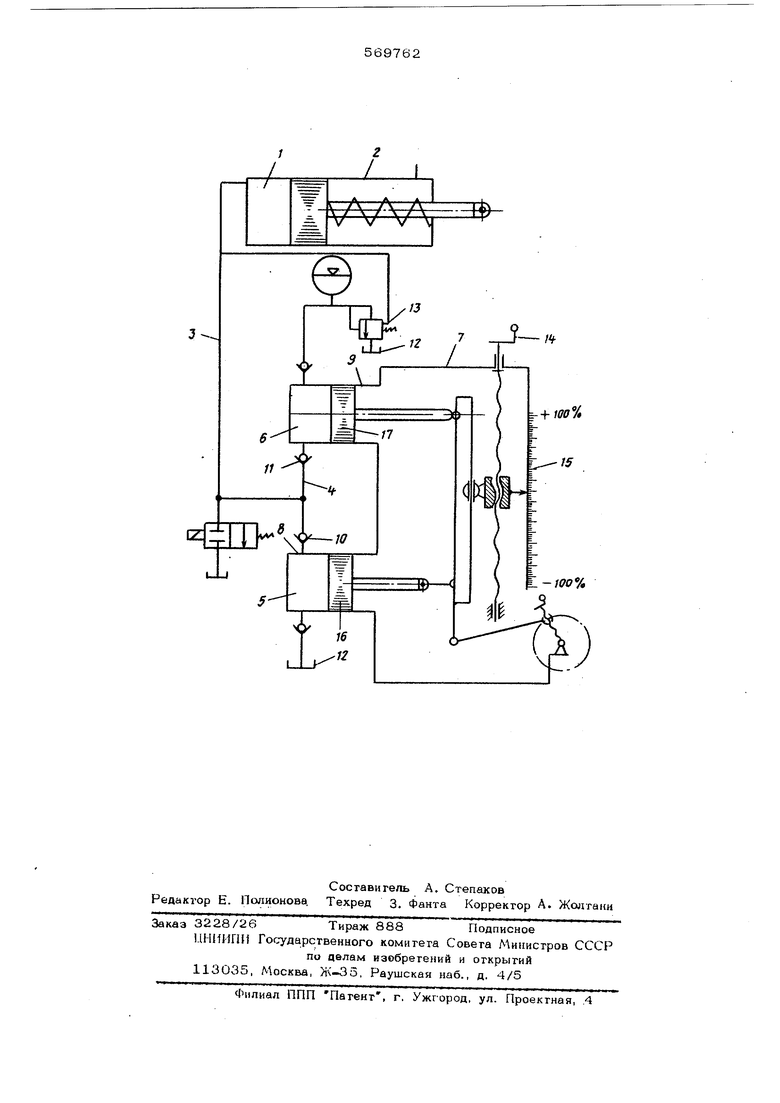
На чертежа изображен описываемый гидропривод.
Ов содержит рабочую камеру 1 исполнительного гидроцилиндра 2, гидролиння 3 постоянно йбдключена к гидролинии 4, обеспе-
чивакицая последовательное соединение рабочих камер 5 и 6, дозировочного насоса 7, выполненного в виде двух цилиицров 8 и 9. Гкдролиния 4 снабжена обратными клапанами 1О и 11, выполняющими функции клапанного распределения жидкости в дозировочном насосе. Камера 5 сообщена с резервуаром 12 гидроприводной жидкости, а выход из камеры 6 снабжен нагружающим устройством 13, препятствующим самопроизвольному протеканию жидкости из рабочей камеры 1 гид- роципяндра 2 в сливной резервуар 12. Регу- лятор 14 хода поршней насоса со шкалой 15 связан с механизмом регулирования длины хода поршней 16 и 17 рабочих камер 5 и 6 насоса и обеспечивает возможность иэменения отношения длин их ходов в рабочем цикле насоса.
Гидропривод работает сле;1уюшим образом. Регулятор 14 установлен в положении, обеспечивающем равенство ходов поршней 16 и 17. В этОм случае при движении поршня 1.6 влево (такт нагнетания камеры 5) происходит вытеснение порции жидкости в гидролини 4 через клапан Ю. Одновременно за счет
оеремешения поршня 17 вправо (на тахте всасыьаиия; камеры 6) и гидролинии 4 проиходиг отбор порции 9КИДКОСТИ. Поскольку длины ходов псфшней одинаковы, то при равен стае кх диаметров будут одинаковы и объдмы указанных порций жидкости.
Таким образом, результирующая подача жидкости в рабочую камеру 1 гидроцилиндра будет равна нулю. Если регулятором 14 за дать длину {хода поршни 16 несколько боль щей, чём длина хода поршня 17, то объем жидкости, подаваемый в гидролинию 4 из камеры 5, окажется большим, чем величина объема жидкости, отбираемого из той же гидролинии камерой 6. Поэтому при отрабог ке насосом одного рабочего никла шток гидроиилиндра сместится вправо на величину, определяемую разностью рабочих объемов камер 5 и 6.
.
Для реверсирование држвода достаточнс регулятором 14 задать длину хода поршня 17 большей, чем длина хода поршня 16. По шкале 15 насоса регулятором 14 можно задавать необходимую разницу длин ходов поршней 16 и 17 и тем самым с высокой точностью определять величину шагапере мешения гидроаилиндра 2 н направление его движения.
Формирование объема порции, жидкости, подаваемой в рабочую камеру 1 кт отбираемой из нее, производится дьумя рабочими камерами насоса как разница величин их рабочих объемов.
Все это способствует уменьшению угечек жидкости, погрешностей изготовления элементов дозировочного насоса, определяющих величину литражей его камер, сжимаемости жидкости в камерах, а также нестабильности работы распределительных клапанов.
В результате повышается точность отработки шага гидроцилиндра и стабильность работы привода особенно при малых и сред них скоростях движения исполнительного гидроцилиндра. Это расширяет функциональные ВОЗМОЖНОСТИ: предлагаемого дискретного реверсивного гидропривода и область его промышленного применения.
Формула изоретения
Дискретный реверсивный гидропривод, содержащий дозировочный насос, сообщенный с рабочей камерой исполнительного гидроцилиндра, и регулятор хода поршня насоса, о т - личающий-ся тем, что, с .целью рао ширения функциональных возможностей гидропривода, дозировочный насос выполнен в виде двух цилиндров с последовательно соединенными рабочими камерами гидролинией, снабженной обратными клапанами и постоянно связанной с рабочей камерой исполнитель ного гидроцилиндра.
Источники информации, принятые во внимание при экспертизе.
1. Бюллетень НТИ по гидромашиностроению, 19S8, NI 47с. 16-30, схема N 14, рис. 1.
tA-A-A-T
V V r
II
/
/
wo%
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод стола плоскошлифовального станка | 1977 |
|
SU661153A1 |
| Гидравлический привод | 1982 |
|
SU1134810A1 |
| ГИДРОПРИВОД ЭКСКАВАТОРА | 1990 |
|
RU2041323C1 |
| Гидропривод возвратно-поступательного движения | 1976 |
|
SU612077A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1985 |
|
SU1301968A1 |
| Гидравлический привод стола плоскошлифовального станка | 1975 |
|
SU526724A1 |
| НАСОСНЫЙ ГИДРОПРИВОД | 2007 |
|
RU2349796C1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1991 |
|
RU2019649C1 |
| КЛАПАННАЯ СИСТЕМА АВАРИЙНОГО ОТКЛЮЧЕНИЯ | 2006 |
|
RU2319054C2 |
| Гидропривод | 1983 |
|
SU1087706A1 |