1
Изобретение относится к измерению параметров движения, в частности к датчикам угловых скоростей и акселерометрам со струнными преобразователями.
Известные ДУСы и акселерометры соj
струнными преобразователями сложны или обл&дают большими погрешностями, связаннь{ми с релаксационными явлениями в материа1 е упрзтих ленточных подвесов, температурными погрешностями, а также погрешностями j0 от линейных перегрузок l и 2.
Для повышения точности и надел«ости в предлагаемом устройстве четыре парадлел ные трубчатые консоли равномерно располо- 15 жены на кожухе гироузла и скреплены с ним так, что вектор кинетического момента перпендикулярен к оси подвеса, а оси чувствительности струнных датчиков располоиекы радиально относительно центра масс гироузла. 20
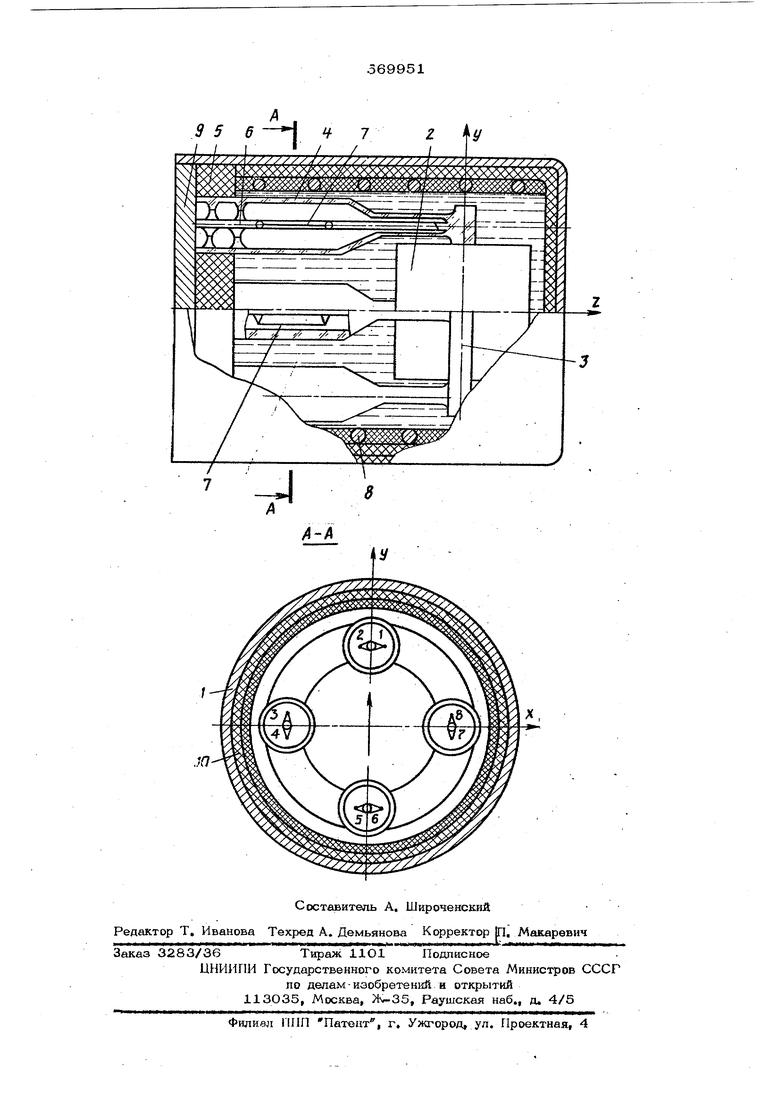
На чертеже представлена упрощенная коно труктнвная схема устройства.
Устройство содержит герметичный корпус 1, заполненный приборной жидкостью, и г роузел 2, закрепленный с помоцтъю кварде 25
вого кольца 3 и четырех трубчатых упругих подвесов 4 на основании 5,
Трубчатый подвес 4 представляет собой консольный элемент в виде, сужающейся в форме пипетки трубки, внутри которой размешен стержень 6, жестко скрепленный изнутри с торцовыми частями трубки. Вдоль средней части стержня 6 натянуты струны 7, Внутренний объем трубки герметизирован и в нем обеспечен вакуум.
Кроме этого, устройство имеет обмотку термостатирования 8, заглушку 9 и термоизоляционную прокладку 10,
Для упрощения графической части на чертеже не показаны элементы системы возбуждения струн и токоподводы.
ДУС - акселерометр работает следующим образом.
При появлении угловой скорости «ju по иэмерительной оси гироскопический момент скру чивает трубчатые консоли 4, деформирует расположенные внутри их стержни 6, меняя натяяение струн 7 и их собственные чабтоты поперечных колебаний..Разность частот поперечных колебаний струн каждого из дат чиков в консолях 5 служить мерой иэмеряемых угловых скоростей. Одновременно с появлением линейных уокорекий в плоскости, перпендикулярной к оси консолей, происходит линейное смешение ги- роузпа в поПе инерционных сил. При этом разность частот струн датчиков в консол10с 4, размешенных по оси У, функционально Ьвязана с проекцией ускорения на ось X, Анап( гично разность частот струн датчиков по оси X функционально связанг с проекцией линейных ускорений на ось У, Таким образом, в выходном сигнале, сформированном по разности частот струн однаго и того же датчика, одновременно присутствует информация как об угловой скороо ти ш I так и проекциях W , -Wy линей ного ускорения на соответствующую ось. Если выходной сигнал формировать по ра ности частот струн различных датчиков, ра; мешенных по оси У или X, можно разделить сигналы и выделить инфо дмацию по угловой скорости и проекциям линейных ускорений. Частоты; струн всех четырех датчиков можно представить в следующем виде: ДТ« + AlW f f V J1 Jfl от угловой скорости Wf uTwx, измерение натяжения струн от линейных ускорений W XllйЧvy , измеряемых ст ными: датчиками. Полагая характеристики всех струнных датчиков идентичными к такую конструкти ую реализацию струнных элементов, котоая гарантирует справедливость неравенства г- « t при воздействиях на чувствительг ы§ .элемент угловых скоростей и линейных скорений, предусмотренных техническим за анием, линеаризуя выражения (1) - (8) в окрестности точки - -«О, можно получить ыражения для разностей частот струн в виеfi-fa-fs-fz fb-fs f-r-fH- o f-V..,.feA Таким образом, линейная комбинация частот струн согласно выражениям (9) - (11) позволяет получить информацию и об угловой скорости Си, и о проекциях W , линейных ускорений. Конструкция устройства обеспечивает четырехкратное резервирование системы съема сигнала по угловой скорости w и двухкрат-ное по линейным ускорениям. Наличие приборной Ж11дкости cHHJKaei; степень влияния на работу устройства вибрационных и ударных перегрузок, а обмотка термост;атирования позволяет обеспечить стабильные условия рц боты струнных преобразователей. Формула изобретения Струнный ДУС-акселерометр, содеряеший заполненный жидкостью герметичный корпус, гироузел, упругий подвес в виде трубчатых консолей со стержнями по осям трубок, жес-гко.скреппенными изнутрисо стороны торцов, струнные датчики, закрепленные на средних частях стержней, и систему термостатирова рия, отли ч а ю щ.и и с я тем, что, с (цепью повышения точности и надежности, чёты-г ре параллельные трубчатые консоли равномерно) расположены накойогхегироузла и скреплены с ниц так, что вектор кинетического перпендикулярен к оси подвеса, а оси чувствительности струнных датчиков расположены радиально относительно центра масс г роузла. Источники информации, принятые во вн мание при экспертизе 1, Патент СШАк 3,630,091, кл, 73-1, 28,12,71, . Авторское свидетельство № 322720 кл, G- 01р 3/70, 01,07,70,