1
Изобретение относится к области вычнЬ лйтельной техники я преднаеначено для. уг ференцирования сигналов, представленных в аналоговой форме.
Известны дифференшфуюшие устройства б содержащие суммирующие, апериодические и интегрирующие усилители и преднааначе иые для вычисления производной по от аналоговых сигналов М, 2},
Недостатками тагаах., устройств являются IQ наличие динамической погрешности и малое быстродействие.
Наиболее близким техническим решениек к изобретению является дифференцирующее устройство, содержащее два суммирующих fS усилителя и апериодический усилитель, вход которого соединен с выхоДом первого суммирующего,, усилителя, а выход с первым входом второго суммирующего усилителя 3.р
В этом устройстве наличие запаздывания io в работе, зависящего от величины постоянных времени апериодических усилителей, приводит к увеличению динамической Погрешности и пониж«1ию быстродействия устройств ва. Кроме того, такое усггройство при йовч 28
2
местной работе с датчиками, ос ществляющими преобразование исследуемы сигналов в напряжение постошшого тока и обладающими j апериодической передаточной функ1ией, не позволяет компенсировать динамическое запаздывание, вносимое этимв датчиками.
изобретения гвляется устранена указанных недостатков
Эта цель достигается тем что в предложенном ycTpolfcTBe вход соединен с пер вым входом первого суммирующего усилитн ля выход которого соединен со вторым входом второхт) суммирующего усилителя, выход последнего подклйчен ко второму входу первого суммЕфуюи1его усилителя и к выходу yCTpofleifBa
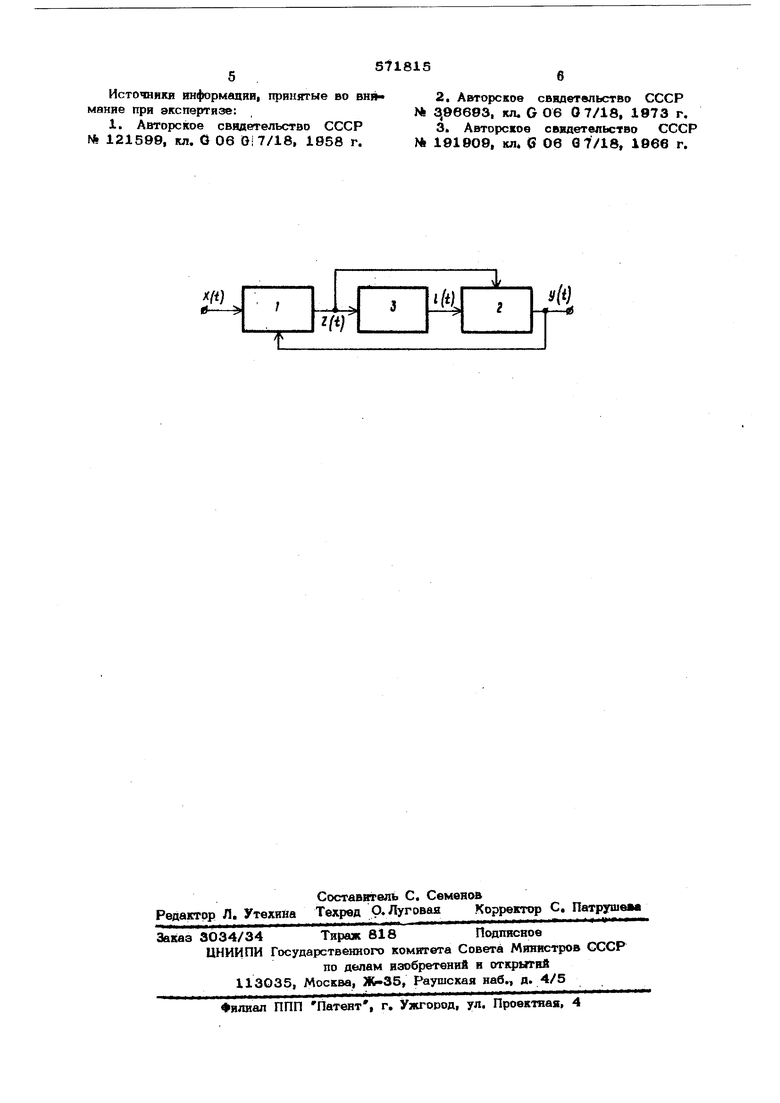
На чертеже изображена аи{| ферендирующего устройства.
Дйфференщфздатгеё устройстао содержит суммирующий усилитель 1, одий вход которого соединен с входом устройства, а дру. гой с выходом суммирующего усилителя 2, Выход усилителя 1 подряючен ко входу ая иодкческого усилителя 3 я первому входу усилителя 2, второй вход которого соединен с выходом усилителя 3. Выход усняителя 2 .подключен к выходу ycrpoilcTва. Устройство работает следующим образом Входной сигнал Х(1) , представленный в форме напряжения постоянного тока, протупает на вход усилителя 1, напряжение с выхода которого подается на вход усилителя 3 с передаточной функцией Wn- . В соответствии с выражением (1) для напряжения t(t) на выходе усилителя 3 в любой текущий момент времени выполняет ся соотношение - m)--z(thWA,p,, где знак минус соответствует инве1Т иру пшм свойствам усилителя 3, -На выходе усилителя 2 образуется сумм напряжений )Zft)(t|«Z(t)ti-WA p,J , которая подается на вход усилителя 1| где суммируется с входным напряж 1Ием Xft), Далее,, указанные операшга многократно повторяются и таким образом с помощью усилителей 1, 2, 3 реализуется итерацион ная процедура, и --я итерация которой отесывается следующими соотношениямд; )-x|t; i-w,,j (l)WA,p,,(31 .УпИ) - x(tHi-WApjj|: 1.(р, (м Поскольку область сходимости ряда i - Wд {р) при к сумме 5 t|irip) частотной 1форме представляет собой окруявность радиусом (1) с центром в точке на комплексной плоскости, а ал шштудн9-фазовая.:| характеристика усилителя 3, описываемая соотношением (1) , лежит внутри этой области сходимоо тй, то итерадионная процедура (2), (3), (4) сходится при к С и) «fn inW - -x(t) ; х((),р,3 T-x(t) , «m Э„(0 т. е. на ьыходе устройства сформирует-ся ирой одная по времени от исследуемого сигнала. ГГредложённое дифференцирующее устройс во аффективно работает теоретически во всем диапазоне частот, а практически в том диапазоне, на котором выдерживается линейность характеристик операционных усилителей. Частотный диапазон современных операционных усилителей составляет сотни килогерц, что более чем на несколько порядков выше частотных диапазонов исследуемых сигналов и позволяет использовать данное устройство для вычисления производи ной в темпе с исследуемым процессом, В отличие от известных устройств динамическое запаздывание данного дифферент рующего устройства практически не зависит от характеристики апериодического yci лителя, что позволяет получить более вь сокое быстродействие по сравнению с иэвестными устройствами. Технико-экономическим эффектом от применения предложенного устройства, кроме повышения динакшческой точности самого дифференцирующего устройства, является компенсация динамического запаздывания, вносимого входными датчиками (совместно с Которыми может работать устройство), осуществляющими преобразование входного сигнала в напряжение постоянного тока, передаточная функция которых описывается апериодическим зВеном. i- Выбирая постоянную времени Т апериодического усилителя 3 равной постоянной времени Тд входного датчика, можно кол пенсироват ь запаздывание, вносимое входными датчиками. Возможность компенсации с помошыо предложенного устройства апериодического запаздывания, вносимого входными датчика- ми, позволяет также расширить область npi менения существующих датчиков, обладающих большими постоянными времени. Формула изобретения Дифференцирующее устройство, содержа-, щее два суммирующих усилителя и апериодический усилитель, вход которого соединен с выходом первого суммИрующ Ч) усилителя, а выход - с первым входом второго сумми рующего усилителя, отличающеес я тем, что, с целыо повыщения динамической точности, вход устройства соединен с первым входом первого суммирующего уси1 лителя, выход которого соединен со вторым входом второго С5 мирующего усилителя, которого подключен ко второму входу первого суммирующего усилителя и к выходу устройства.
Источники информапяв, прин5ггые во вн мание при экспертизе:
1. Авторское свидетельство СССР f 121599, кл. О 06 017/18, 1958 г.
2.Авторское свидетельство СССР J 3,96693, кл. О 06 07/18, 1973 г.
3.Авторское свидетельство СССР Nk 191909. кл. (З 06 G7/18, 1966 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2544483C1 |
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| Устройство для ограничения динамических усилий в механизме экскаватора | 1987 |
|
SU1509488A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513667C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| ЭЛЕКТРОПРИВОД С КООРДИНАТНО-ПАРАМЕТРИЧЕСКИМ УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2004 |
|
RU2261522C1 |
| Пропорционально-интегрально-дифференциальный регулятор для объектов с запаздыванием | 1988 |
|
SU1596304A1 |
fli)
Г
