1
Изобретение относится к системам управления цикловыми процессами и может быть применено в металлорежущих станках, кузнечно-прессовых, литейных и других машинах.
Р1звестны командоаппараты струйного действия с подвижным гибким замкнутым программоносителем и бесконтактным считыванием 1. Наиболее близким к изобретению по технической сущности является пневматический командоаппарат, содержащий корпус, в котором выполнены приемные сопла и установлен полый барабам с отверстиями для шариков- программоносителей, связанный с шаговым приводом 2. Однако эти известные командоаппараты осуществляют управление циклом только при автоматическом режиме работы. Для осуществления наладочного режима работы служат дополнительные пневматические устройства, усложняющие систему управления, снижающие ее надежность, a следовательно, суживающие область применения.
Целью изобретения является расширение области применения. В описываемом командоаппзрате это достигается тем, что в его корпусе между барабаном и приемными соплами выполнены дополнительные сопла, соосные приемным соплам и отверстиям в полом барабане, a между приемными и дополнительными соплами установлены планки дистанционного управления с отверстиями, соосными соответствующим дополнительным и приемным соплам, причем на каждой планке выполнен выступ под лыску оси блокировочного механизма, установленного в корпусе.
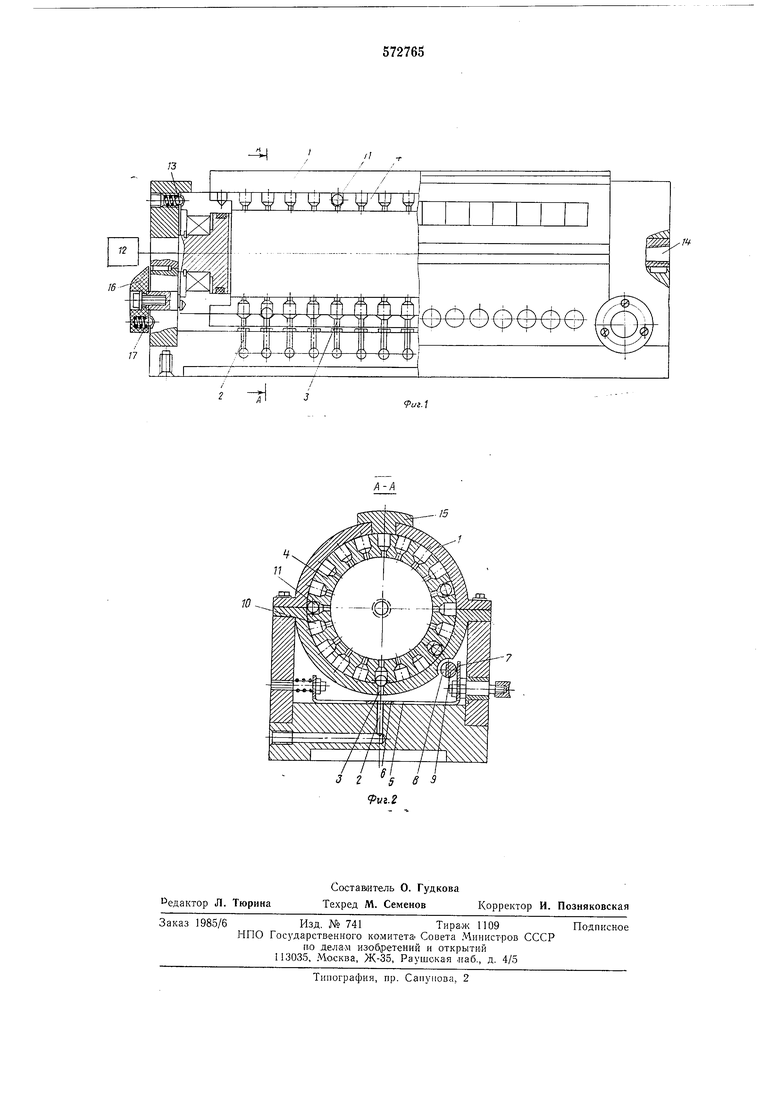
На фиг. I изображен описываемый командоаппа.рат при автоматическом режиме работы, продольный разрез; на фиг. 2 - разрез по А-А на фиг. 1.
В корпусе 1 пневматического командоаппарата выполнены приемные сопла 2, дополнительные сопла 3 и установлен полый барабан 4, между приемными и дополнительными соплами установлены планки 5 дистанционного управления с отверстиями 6. Каждая планка 5 имеет выступ 7 под лыску 8 оси 9, которые составляют блокировочный механизм, установленный в корпусе. В полом барабане 4 выполнены отверстия 10 для шариков-программопосителей 11. Полый барабан 4 связан с шаговым приводом 12. Полый барабан 4 установлен с возможностью шагового вращения от храпового механизма, в данном случае - с шаговым приводом, и с фиксацией в рабочем положении при помощи, например, подпружиненного шарика 13. Для подвода воздуха во внутреннюю полость барабана имеется отверстие 14. Ряды радиально расположенных по окружности барабана отверстий 10 - дорожки служат (каждая) для управления одной из координат или одним из параметров какого-то объекта, например направлением перемещения исполнительного органа металлорежущего Станка, скоростью перемещения и т. д.; ряды отверстий вдоль образующей барабана - строки получают (каждая) один из сигналов с каждой дорожки. В отверстия 10 барабана в соответствии с программой закладывают шарики 11 при снятой крышке 15. В каждом зафиксированном положении ряд отверстий в строке барабана 4 совпадает с дополнительными соплами 3 в корпусе 1, с отверстиями 6 в планках бис приемными соплами 2. Планки 5 или свободно пропускают Струи воздуха, или прекращают их поступление при смещении от исходного положения при воздействии на их кнопки управления. Для возврата планки 5 в исходное положение служат пружины. Блокировочный механизм, выполненный в виде оси 9 с лыской 8, занимает два положения: лыска 8 обращена к выступам 7 планок 5 или повернута относительно .них на 180°. На лицевой стороне командоаппарата установлен переключатель 16, служащий для возврата и фиксации оси 9 при помощи, например, подпружиненного щарика 17.
Для осуществления автоматического режима работы в отверстия 10 полого барабана 4 закладывают шарики 11 в соответствии с заданной программой, причем в отверстия одной из строк щарики не закладывают, она является строкой исходного положения командоаппарата; ось 9 находится в пололсении, исключающем случайное смещение планок 5 от кнопок управления. Воздух через отверстие 14 подается внутрь барабана 4, а затем через совпадающие свободные от щариков отверстия 10 и сопла 2 и 3 поступает, например, в логическую часть схемы непосредственно к усилителям. Перед началом подачи управляющего сигнала в привод барабан поворачивает на один такт с фиксацией при помощи шарика 13.
Число выполняемых объектом технологических операций в каждом такте определяется количеством шариков, заложенных в отверстия 10.
После выполнения команд, записанных в строке, от контрольных устройств поступает сигнал на поворот барабана 4 на следующий шаг.
Одна из дорожек барабана 4 предназначена для установки его в исходное положение.
Для осуществления режима наладки ба.рабаН 4 находится в исходном положении, а блокировочная ось 9 переключателем поворачивается на 180° (см. фиг. 2) и фиксируется при помощи шарика 17. Перекрытие струи воздуха в приемнике сопла 2 осуществляется смещением планок 5.
Таким образом, осуществляется управление объектом вручную.
Пружины возвращают планки 5 в исходное положение.
Формула изобретения
Пневматический командоаппарат, содержаЩий корпус, в котором выполнены приемные сопла и установлен полый барабан с отверстиями для шариков-программоносителей, связанный с шаговым приводом, отличающийся тем, что, с целью расширения области применения, в корпусе между барабаном и приемными сопла.ми выполнены дополнительные сопла, соосные приемным соплам и отверстиям в полом барабане, а между приемными и дополнительными соплами установлены планки дистанционного управления с отверстиями, соосными соответствующим дополнительным и приемным соплам, причем на каждой планке выполнен выступ под лыску оси блокировочного механизма, установленного в корпусе.
Источники информации, принятые
во внимание при экспертизе 1. Сборник «Пневматические средства и системы управления. М., «Наука, 1970, с. 303.
2. «Описание командоаппарата типа П-КА. Харьков, ВНИИГИДРОПРИВОД, 1971. А
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРУЙНЫЙ КОМАНДОАППАРАТ | 1972 |
|
SU346709A1 |
| СЕКРЕТНЫЙ ЗАМОК | 1992 |
|
RU2043475C1 |
| Пневматический командоаппарат | 1981 |
|
SU957173A1 |
| Устройство для приведения кругловязальной машины в положение,соответствующее началу вязания изделия | 1985 |
|
SU1339173A1 |
| Устройство для групповой ориентации и загрузки деталей | 1987 |
|
SU1458147A1 |
| Запоминающее устройство | 1981 |
|
SU1014038A1 |
| Замок с кодовой системой | 1980 |
|
SU937695A1 |
| Устройство для сверления глубоких отверстий | 1977 |
|
SU707699A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Тормозное устройство | 1984 |
|
SU1143907A1 |
32 83
5 9иг.г
