(54) ДОЖДЕВАЛЬНАЯ УСТАНОВКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи воды к дождевальной машине в движении | 1984 |
|
SU1367834A3 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА ДЛЯ ПРЕЦИЗИОННОГО ОРОШЕНИЯ | 2016 |
|
RU2631896C2 |
| ШИРОКОЗАХВАТНЫЙ КОЛЕСНЫЙ ДОЖДЕВАТЕЛЬ | 2003 |
|
RU2236117C1 |
| РУЧКА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2000 |
|
RU2175290C2 |
| Машина для автоматического измерения профиля поперечного сечения зуба и винтовой линии поверхности зуба зубчатого колеса | 1975 |
|
SU656550A3 |
| Дождевальная установка | 1981 |
|
SU938841A1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2008 |
|
RU2404569C2 |
| Устройство для изготовления литых т-образных бетонных изделий | 1973 |
|
SU615844A3 |
| ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2009 |
|
RU2402198C1 |
| ДОЖДЕВАЛЬНЫЙ АГРЕГАТ ФРОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ | 2013 |
|
RU2567748C2 |
Изобретение относится к сельскому хозяйству, в частности, к оросительной тех1шке, и может быть использовано в дождевальных установках, работающих по Kpyiy.
Известны дождевальные установки, включающие вращающийся вокруг центрального шарнира секционный напорный трубопровод с разбрызгивателями, помещенный на привод11Ь1е колесные опоры.
Одна из трудностей, возникающих при использовании подобных устройств, состоит в том, что орошаемый участок вынужденно приобретает форму круга, радиусом которого является основной трубопровод. Позтому применение дождевальной установки вращающегося типа на прямоугольном участке посевов приведёт к тому, что значительная часть площади (за пределами этого круга) остается неорошекной. Установлено, что подобные системы оставляют неорошенными 21,4% потенциально продукт шной площади квадратного поля.
Цель изобретения - ооесн чение возможно«я полива участков разлишой конфшураиии.
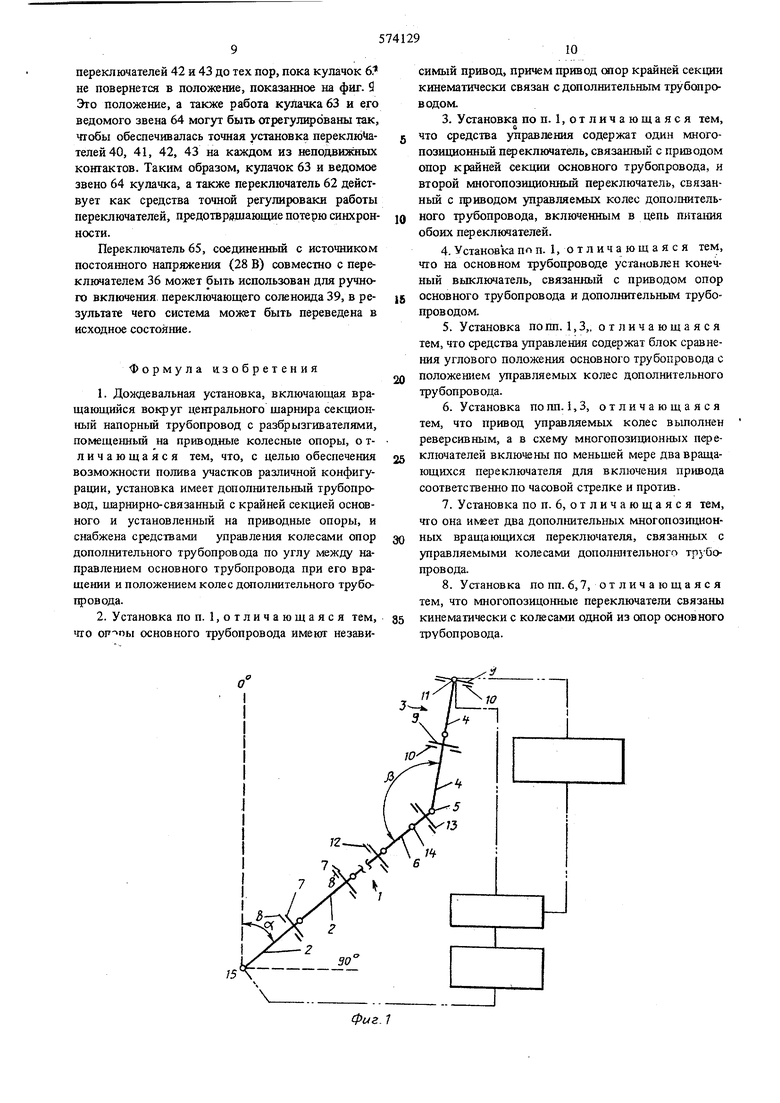
Это достигается тем, что дождевальная установка имеет дополнительный трубопровод, шарнирносвязаш1ый с крайней секцией основного трубопровода и установленный на приводные колесные опоры, и снабжена средствами управления колесами опор дополнительного трубопровода по углу между направлением основного трубопровода при его вращении и колес дополнительного трубопровода.
Опоры основного трубопровода имеют независимый привод, причем привод опор крайней секции основного трубопровода кинематически связан с дополнительным трубопроводом.
Средства управления содержат один многопозиционньш переключатель, связанный с приводом опор крайней секщ1и основного трубопровода, и второй многопозидионный переключатель, связанный с пр шодом управляемых колес дополнительного трубопровода, включенным в цепь питания обоих переключателей.
На основном трубопроводе установлен конечный вьшлючате;п, связанный с приводом опор основного трубопровода и дополнительным трубопроводом.
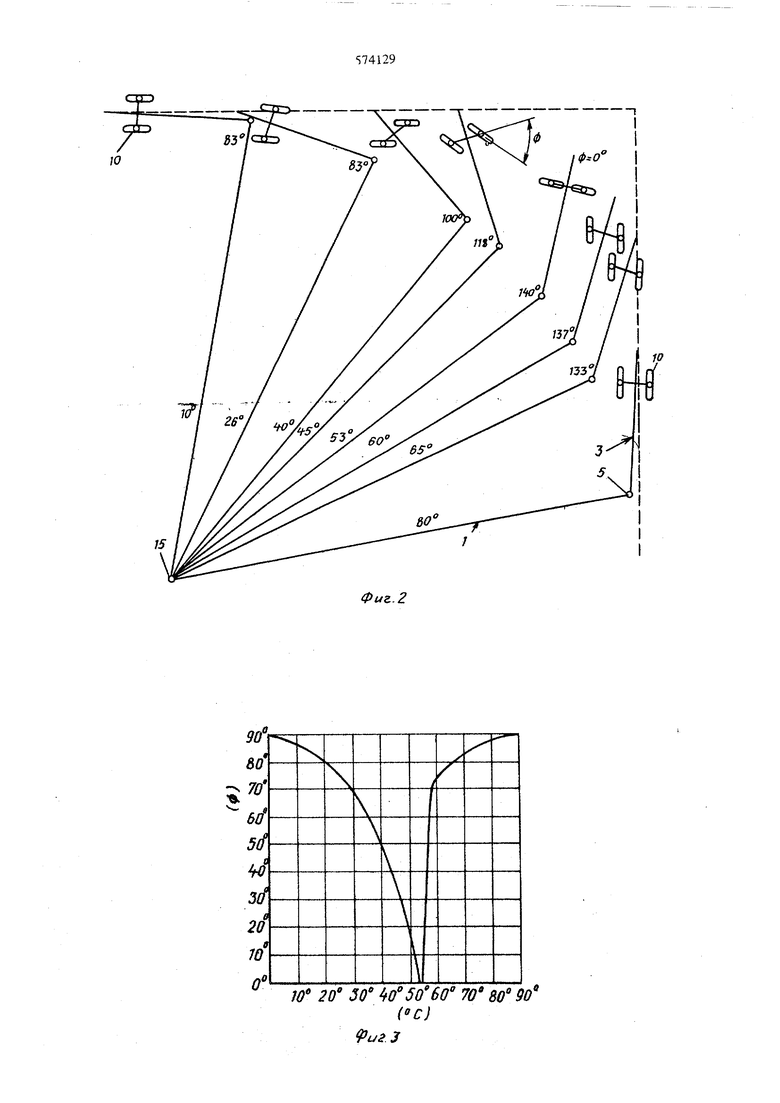
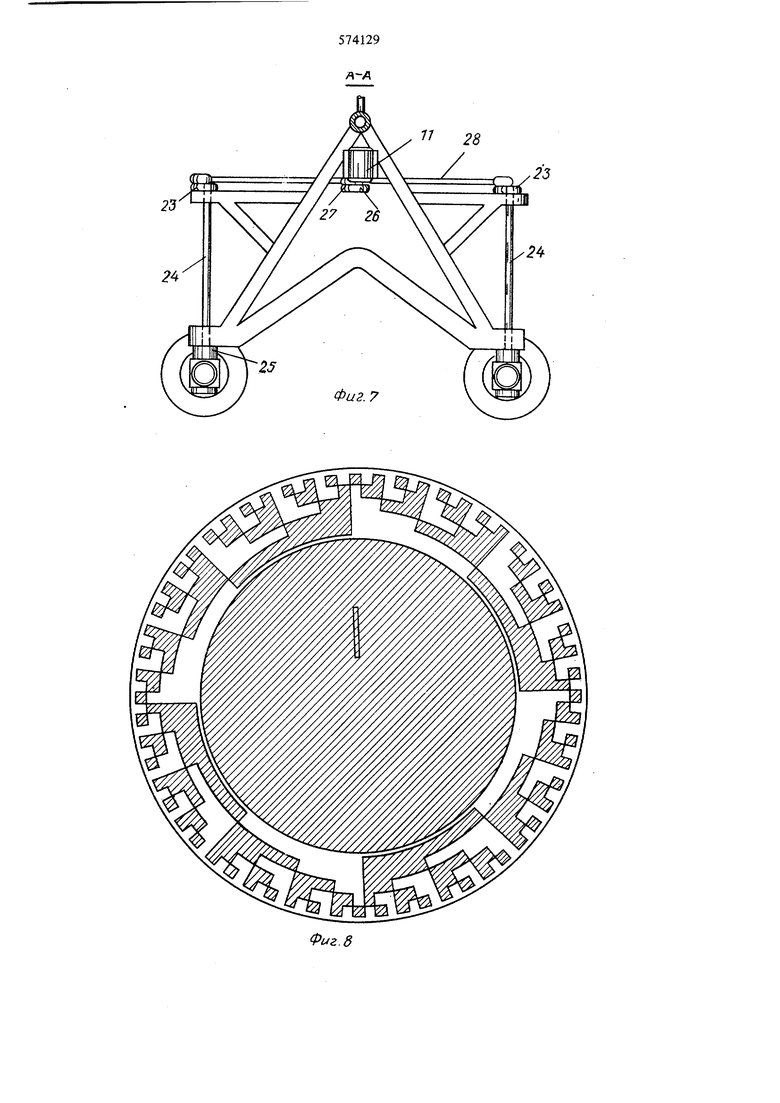
Средства управле1шя содержат блок сравнения углового положения основного трубопровода с положением управляемых колес дополнительного трубопровода. Привод управляемых KonecJBbinonHeH.,i3eBepcHBн iM, а в схему многопозициозшых переключателей «1. , по меньшей мере два вращающихгя переключателя для включения привода соответственно по часовой стрелке и против. Установка имеет два дополнительных многопозиционных врашянщхихся переключателя, связанных с управляемьЕми колесами дополнител -ного трубопровода и кинематически с колесами одной из опор основного трубопровода. На фиг. 1 изображена принципиальная схема предлагаемой установки (первый вариант); на фиг. 2 - схематически изображены взаимные положения основного и доп ошштельного трубопроводов при обработке одного квадранта поля; на фиг. 3 график зависимости положения управляемых колес от угла установки основного трубопровода; на фиг. 4- основной трубопровод, вид спереди; на фиг. 5 - дополнительный трубопровод, вид спереди; на фиг. 6 дождевальная установка, вид сверху; на фиг. 7 - А--А на фиг. 6; на фиг. 8 - один из дисков кодирующего устройства, применяемых в первом вариагое установки; на фиг. 9 - Схема электрической системы правления установкой (второй вариант). Основной трубопровод 1 состоит из отделыа1Х секций 2, расположенных по одной прямой. Допол й1тельньш трубопровод 3 может содержать, например, две секции4, одна из-,которых в точке 5 aiapinipHO соединена с наружным шш свободным кошюм крайней секции 6 основного трубопровода. Каждая из секций 2 основного трубопровода поддерживается соответствующей опорой, на которой смошированы колесные пары 8. Секции 4 подаерж1шаются опорами 9, снабженными соответствующими колесными парами 10. Конструкция опор 7 и 9 одинакова, за исключением того, что колеса 10 управляемые. Практически для управления колесами 10 может быть использован один приводной злект зодвигатель 11. К трубопроводу 1 и дополнительному трубопроводу 3 подается вода; оба трубопровода содержат разбрызптающие устройства, обеспечивающие равномерное распределение воды. Основной трубопровод, длина которого постоянна, может обеспечить лишь обработку круговой части поля. Дополнтельиый трубопровод 3, поворачиваясь BOKjiyr точки 5, позволяет орошать участки поля за пределами этой круговой части. Управляя положением трубопровода 3 относительно основного (зто положение определяется углом |3), можно производить ороше1ше площа;;ей некрутой формы. Каждая колесная пара 12 проводится электродвигателем (на фиг. 1 не показан) с постоянной частотой враще1шя. 15 месте соединения крайней секции 6 и прилегающей к ней секили установлен конечный выключатель. Когда под действием деформации, воз шкающей в л«сте этого соединения при перемещении 60 крайней секции 6, вьжлючатель срабатьшает, включается двшатель прилегающей секции. Аналогичным образом перемещение второй секции вызьшает срабатьшапие конечного вьпслючателя в месте соединения второй секции с третьей и включеше двигателя, приводящего третью секцию, и так далее для каждой из оставщихся секций. Каждый из двигателей обеспечивает вращение связанных с ifflM опорных колес с одной и той же скоростью, и так как секция b движется с наибол шей ск %остью, то и внутренние секции движутся в прерывистом режиме, причем секция, ближайшая к цешру, перемещается в тече1ше наиболее коротких периодов. Такая система сравнительно проста и дешева, она допускает применение одинаковых злектродвигателей с постоянной частотой вращения и не требует специального редуктора для каждой из секций. Система может управ;шться движением дополнительпого трубопровода, а не крайней секцией основного плеча. Двигатель, приводящий в движение 13, работает не непрерьшно, а включается реагирующим на деформации конструкции конечным выключателем 14. В основании 15 основного трубопровода расположено кодирующее устройство углового положения, которое может быть аналого-цыфровыму и преобразует угол (фиг. 1) в дафровой сигнал, включаю ций пять двоичных едипи-Ц. Аналогичное кодирующее устройство устаиовлеко в опоре 9, сшбженной управляемылш колесагущ 10. Это устройство также генерирует цифровой сигнал, включающий пять двоичных единиц и несуп ий информацию об угловом положегши управляемых колес лг трубопровода 3 относительно прс ййвольно выбранного начала отсчета углов (шпример, от перпендикуляра к трубопроводу 3). Два цифровых сигнала от обоих кодирующих устройств поступают в блок сравнения, генерируюЩйй управляющий сигнал при неравенстве двух цифровых сигналов (или при друго.м задашюм их соотношении). Этот управляющий сигнал подается на двшатель 11 привода управления положением колес, заставляющий колеса 10 поворачиваться до тех пор, пока представлепный в виде идфрового кода снптшл, соответс1вуюиц1Й угловому положеШ1Ю управляемых колее, пе окажется (или не будет иным заданным образом соответствовать) сигналу на выходе кодирующего устройства углового положения основного трубопровода. При достижегши такого положения дашгатель 11 отключается и трубопровод 3 продолжает поворачиваться при неподвижной установке управ;шемых колес. В ходе вращения трубопровода 3 достигается положение, в котором деформащш секции 6 основного трубопровода вызывает срабатываш1е реагирующего на деформации коне1шого выключателя 14. При своем срабатывании конечньп выключатель 14 включает двигатель привода колес секщш 6, приводя эту секцию в движение. Аналогичью описашюму выше перемещение крайней секции основного трубопровода 1 вызьшает последовательное включение двигателей привода колес остальных, расположенных ближе к центру, секций, в результате чего основной трубопровод движется над полем. Для работы установки необходимо определять для каждого отдельного положения основного трубопровода направление установки управляемь1х колес. Это может быть выполнено математически, если известны длины обоих трубопроводов и их относительные скорости. Направление установки ynpaBsmsMbix колес 10 для каждого отдельного положения (Q) основного трубопровода 1 совпадает с -направлением вектора скорости наружной точки трубопровода 3 относительно основания 15. Этот вектор вычисляется для каждого отдельного положения основного трубопровода и диски кодирующих устройств (обеспечивающие подачу различных цифровых сигналов, соответствующих каждому отдельному положению основного трубопровода 1) устанавливаются так, что обеспечивается надлежащее управление управляемыми колесами. На фиг. 3 приведена практическая зависимость между угловым положением а основного трубопровода и углом ф установки управляемых колес, обозначенным на фиг. 2. В итервале от а 40° до а 60° необходимы резкие изменения в положении управляемых колес в связи с перемещение основного трубопровода, однако, линейная скорость крайней секции 6 невелика. Поэтому во всех случаях поворот управляемых колес будет мгновенным, т.е. управляемые колеса устанавливаются в требуемое положение быстро по сравнению с линейной скоростью перемещения обоих трубопроводов установки.
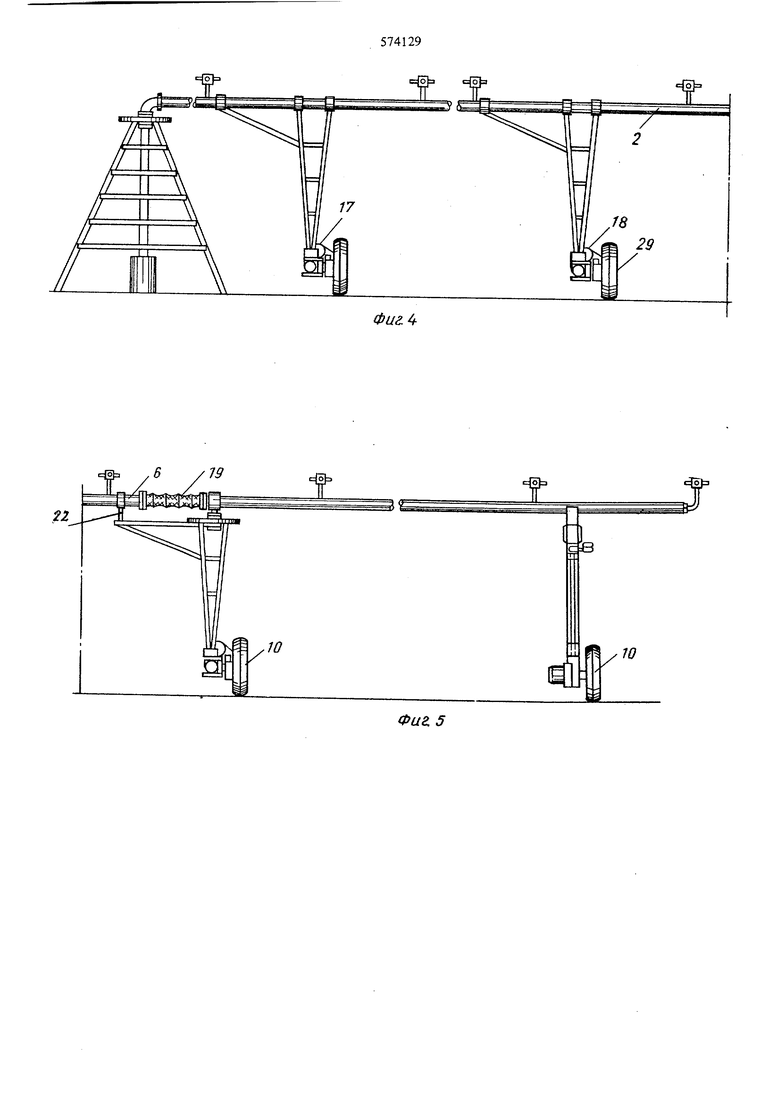
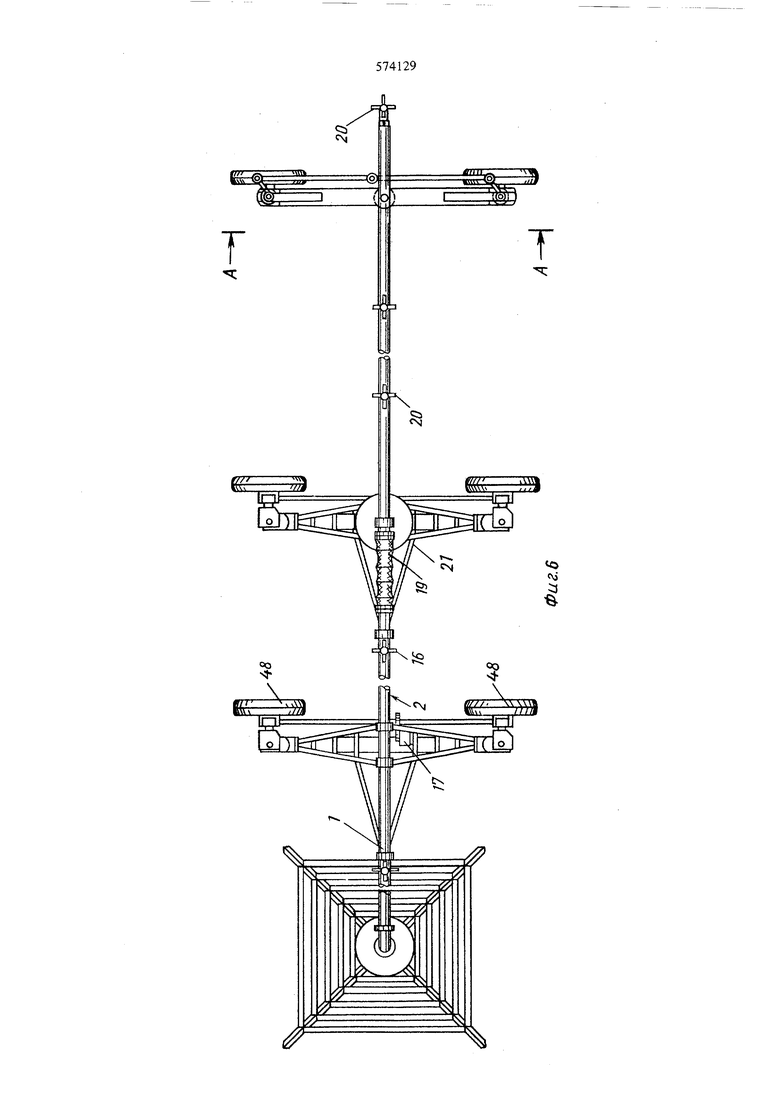
Секции 2 основного трубопровода состоят из полых труб, по которым вода подается к разбрызгивателям 16, расположенным вдоль отдельных секций. На опорах 7 смонтированы электродаигатели 17, приводящие колеса 12, сообщающие вращение трубопроводу 1. Эти электродвигате;ш управляются известным способом, однако, включение двигателя 18 определяется деформавдей секции 6, вызываемой вращением т{5убопровода 3.
Секция 6 может быть соединена с внутренней секцией 4 дополнительного трубопровода гибким шлангом 19, допускающим требуемый поворот трубопровода 3 относительно основного и обеспечивающим подачу воды к разбрызгивателям 20 трубопровода 3. Опора секции 6 может быть снабжена крошлтейном 21, в котором установлен свободно вращающийся палец 22, закрепленный на секции 6.
Электродвигатель 11 управления положением колес смонтирован па опоре 9 над колесами. Электролнигатель 11 имеет постоянную частоту вращения, пуск и остановка его осуществляются по сипилам, 1гоступаюпц1м из схемы сравнегмя. Установка или юложеиие управляемых колес задается маяишковыми р,1чагами 23 (фиг. 7), соединенными с вертикальными валами 24 и поворачивающими поворотные кулаки 25, на которых установлены колеса.
Работа установки осуществляется следующим образом.
5При продвижении дождевальной установки в любом квадранте поля, необходимо установить управляемые колеса сначала в такое первое положение, при котором трубопровод 3 может начать перемещаться наружу, а затем во второе положение, при
10 котором он может вернуться в свое первоначальное положение. Следовательно, в процессе работы установки при обработке каждого квадранта управляемые колеса должны устанавливаться в одно и то же положение дважды (т.е. при входе и сходе). Это
16 создает неопределенность, обычно предъявляемую к конструкции схемы сравнения требование такого изменения закодированных сигналов утлового положения частей системы, при которой появляется возможность различения направления перемещения
0 удлинительного плеча относительно основного. Этого можно избежать благодаря применению рулевого привода кривошипного типа, содержащего вращающийся диск 26, который при работе двигателя 11 вращается только в одном направле1ши. Диск 26
5 связан с маятниковыми рычага ш 23 звеном 27, шарнирно-соединенным с краем диска 26 пальцем. Другим концом звено 27 связано с маятниковыми рычагами 23 горизошальными тягами 28. При такой конструкции (и падаежащем выборе размеров и
0 положения злемеягов рулевого пр1шода) полный поворот диска 26 вызывает поворот управляемых колес 10 на 90° в одном паправлешщ (что соответствует повороту диска 26 на 180°), а затем - на 90° в обратном направлении с возвращеш1ем в исходное положение (при повороте диска 26 от 180° до 360°). Следовательно, так как в пределах каждого квадрата ка),ому положению основ)юго трубопровода соответствует определенное положе1ше диска 26, указанная выше неопределенность в данном случае отсутствует, несмотря на вьшолнение всего цикла работы рулевогопривода.
С дополнительным трубопроводом 3 может быть связан вспомогателышп насос (ш чертежах не показан), что позволяет трубопроводу 3 перемещаться относительно rpyirra с более высокой скоростью, чем ооювному трубопроводу 1.
Информация с диска, изображенного на фиг. 8, может считьшаться с помощью фотоэлектрических устройств (соответствующие устройства для этой
0 цели известны). Аналоги шый диск может быт использован в устройстве, кодирующем сигналы, управляющие положением управляемых колес и обеспечивающие такое положе {ие этих колес, которое обуславливает взаимное положение дополнительного трубопровода 3 и основного 1 в каждом отдельном положении последнего.
Второй варианг n3o6peTetfflH (фиг. 9) также
основан на регистрами угла а, однако, угол не
измеряется непосредственно с помощью кодирую0 щего устройства, изображенного на фиг. 1. Угол на
фиг. 9 измеряется путем счета числа оборотов, совершенных колесом 29 крайней секции 6.
У1равление положением управляемы: колес 10- перемещение их из одного положения в другое и обратно- осуществляется реверсивным электродвигателем.
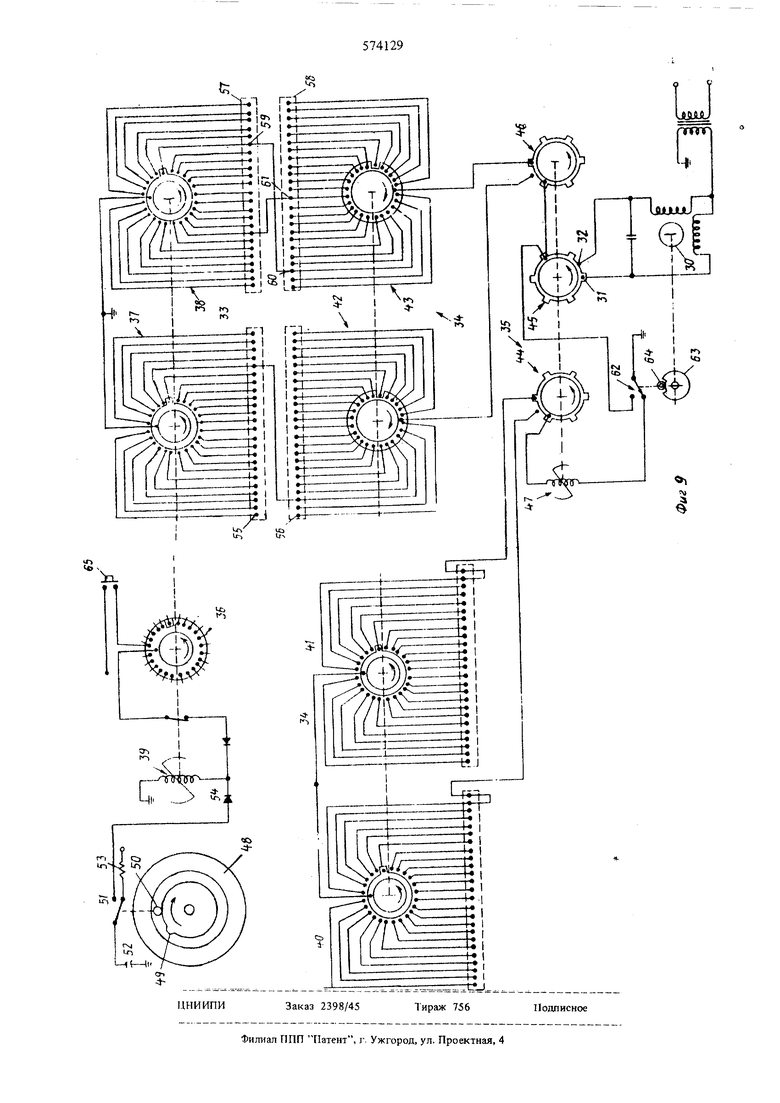
Система управления на фиг. 9 аналогиш изображенной на фиг. 1, за исключением того, что вместо кощфующих устройств и схемы сравнения применены многопозиционные вращающиеся пере-, ключателн, осуществляющие функции код1фования и сравнения.
йверсивный электродвигатель 30 имеет зажимы 31 и 32, которые могут быть попеременно заземлены. Заземление зажима 31, например, вызьшает вращение в направлении по часовой стрелке, а заземлеш1е зажима 32 - вращение против часовой стрелки.
В рассматриваемом вариаше работа системы управляется тремя группами вращающихся переключателей 33, 34 и 35. Группа 33 содержит три двадцатичетырехпозиционных вращающихся переключателя 36, 37 и 38; вращающиеся части этих переключателей управляются вращающимся соленоидом 39. Гру1ша 34 содержит четыре двадцатичетырезшозиционных вращаюидахся переключателя 40, 41, 42 и 43; вращающиеся части зтих переключателей получают механическое 11еремеще1ще любым пригодным для этого способом от рулевого привода управляемых колес 10 трубопровода 3.
Группа 35 содержит три двенадцатипозиционных переключателя 44, 45 и 46, назначение которых состоит в управлении нш1равле1шем вращения двигателя 30. Эти переключатели приводятся в действие вращаюищмся соленоидом 47.
Вращающиеся части переключателей выполнены разными для различных функций. Например, переключатель 41 замыкает в любом из своих положений только один контакт, а переключатель 42 замь кает все контакты, за исключением одного.
Управление работой установки основано на учете числа оборотов, соверщенных колесами 48 крайней секции 6. Колесо 48 может быть снабжено кулачком 49, перемещающим ведомое звено 50, приводящее в действие переключатель 51 один раз за каждый оборот колеса 48. Конденсатор 52 нормально заряжен напряжением источника (28 В) через резистор 53. Один раз за каждый оборот колеса 48 переключатель 51 приводится в действие кулачком 49 и его ведомым звеном 50 и передает заряд конденсатора 52 через диод 54 на вращающийся соленоид 39. Каждый раз при подаче сигнала на соленоид 39 группа переключателей 33 перемещается на одно положение в направлении против часовой стрелки.
Неподвижные контакты переключателя 37 соединены штепсельными разъемами 55 и 56 с неподвижными контактами переключателя 42. Аналогично неподвижные контакты переключателя 38 соединены 1шгепсельными разъемами 57 и 58 с контактами переключателя 43. Отдельные контакты соединены между собой перемычками. Схема соединени контактов программщ)ует работу электродвига теля 30 в соотв етствии с требованием установю угфавляемых колес 10 в желательное положени при каждом отдельном угловом положении основного трубопровода. Эта программа может быт составлена, например, так, что обеспечит изменени установки управляемых колес (ф) в зависимое
от угла а в соответствии с кривыми (см. фиг. 3).
Поедположим, что неподвижный контакт 59 соединен с неподвижным контактом 60 перемычками, включенными между щтепсельными разъемами 5 и 58. Если схема находится в состоянии, изображен
ном на фиг. 3, то при включении в переключате ле 38 контакта 59 зажим 31 двигателя 30 заземля ется через переключатели 45, 46, 43 и 38. В резуль тате происходит пуск двигателя, например, в направлении по часовой стрелке, вызьшающий поворот управляемых колес 10. При вращении двигателя 30 приводится в действие группа переключателей 34 и переключатели 40, 41, 42 и 43 проходят через, свои последовательные положе1шя.
Когда в условиях рассматриваемого примера
переключатель 43 достигает своего контакта 60, заземление зажима 31 двигателя 30 размыкается. В результате двигатель отключается, и поворот управляемых колес 10 прекращается. Таким образом, угловое положение фуправ;шемых колес определяется местом установки перемычки между разъемами 57 и 58.
Когда колесо 48 закашшвает второй оборот, система срабатьшает так, как описано выше, переводя переключатель 38 на неподвижный кошакт 61,
что вновь вызьшает пуск двигателя 30 и работу его до момента, когда переключатель 43 достигнет своего контакта, электрически соединенного с контактом 61 через разъемы 57, 58.
Когда наступает необходимость изменить направление вращения двигателя на обратное, чтобы вызвать поворот управляемых колес в направлении против часовой стрелки, двигатель 30 переводится с помощью группы переключателей 35 под управление переключателями 37 и 38 и процесс повторяется.
Переключатель 62 управляется кулачком 63, вращающимся вместе с ротором двигателя 30, перемещающим ведомое звено 64, которое приводит в действие переключатель. Для получения понижающего передаточного отношения 24:1 от кулачка 63 к группе переключателей 34 применяется соответствующая зубчатая передача. Следовательно, при повороте вращающихся частей переключателей группы 34 между двумя соседними неподвижньсми
контактами кулачок 63 делает один полный оборот. В течение оборота кулачка 63 ведомое звено 64 обеспечивает такую установку переключателя 62, при которой вращающиеся части пфеключателей 45 и 46 заземлены. Это означает, что двигатель 30 не
может быть остановлен независимо от установки переключателей 42 и 43 до тех пор, пока кулачок 6 не повернется в положение, показанное на фиг. 9 Это положение, а также работа кулачка 63 и его ведомого звена 64 могут быть отрегулированы так, чтобы обеспечивалась точная установка переклюЧателей40, 41, 42, 43 на каждом из неподвижных контактов. Таким образом, кулачок 63 и ведомое звено 64 кулачка, а также переключатель 62 действует как средства точной регулироваки работы переключателей, предотврщиающие потерю синхронности. Переключатель 65, соединенный с источником постоянного напряжения (28 В) совместно с переключателем 36 может быть использован для ручного включения, переключающего соленоида 39, в результате чего система может быть переведена в исходное состоя1ше. Формула изобретения 1.Дождевальная установка, включающая вращающийся вокруг центрального шарнира секщюнный напорный трубопровод с разбрызгивателями, помещенный на приводные колесные опоры, о тличающаяся тем, что, с целью обеспечения возможности полива участков различной конфигурации, установка имеет дополнительный трубопровод, шарнирно-связанный с крайней секцией основного и установленный на приводные опоры, и снабжена средствами управления колесами опор дополнительного трубопровода по углу между направлением основного трубопровода при его вращении и положением колес дополнительного трубощ) овода. 2.Установка по п. 1,отличающаяся тем, что основного трубопровода имеют независимый привод, причем привод сяор крайней секции кинематически связан с дополнительным трубопроводом. 3.Установка по п. 1,отличающаяся тем, что средства управжния содержат многопозиционный пфеключатель, связанный с приводом опор крайней секции основного трубопровода, н второй многопозициошшй переключатель, связанный с приводом управляемых колес доао:шительного трубопровода, включенным в цепь питания обоих переключателей. 4.Установка ппп. 1, отличающаяся тем, что на основном трубопроводе установлен конечный выключатель, связанный с приводом опор основного трубопровода и дополнительным трубопроводом. 5.Установка попп. 1,3„ отличающаяся тем, что средства управления содержат блок сравнения углового положения основного трубопровода с положением управляемых колес дополнительного трубопровода. 6.Установка попп. 1,3, отличающаяся тем, что привод управляемых колес вьшолнен реверсивным, а в схему многопозиционных переключателей включены по меньшей мере два вращающихся переключателя для включения привода соответственно по часовой стрелке и против. 7.Установка по п. 6, отличающаяся тем, что она два дополнительных многопозиционных вращающихся переключателя, связанных с управляемыми колесами дополнительного трубопровода. 8.Установка по пп. 6,7, отличающаяся тем, что многопозицонные переключатели связаны кинематически с колесами одной из caiop основного трубопровода.
2
1
/
.
т
«И I I .1 1ЦЧ.«.
ЛУД
,Jill
и
S
л-л
28
23
