(54) МАШИНА ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПРОФИЛЯ
ПОПЕРЕЧНОГО СЕЧЕНИЯ ЗУБА И ВИНТОВОЙ ЛИНИИ
ПОВЕРХНОСТИ ЗУБА ЗУБЧ.4ТОГО КОЛЕСА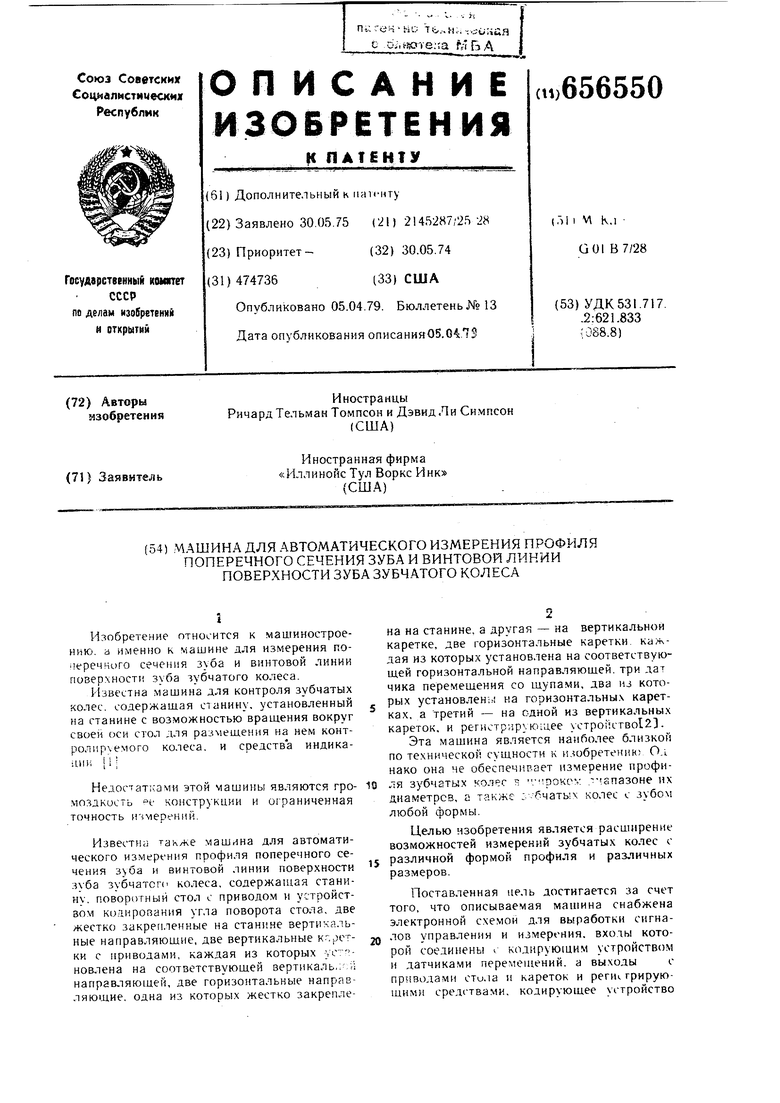



Изобретение относится к машиностроению, -d и.менно к машине для измерения поперечкиго сечения зуба и винтовой линии поверхности зуба губчатого колеса.
Известна машина для контроля зубчатых колес. содержаш.ая С1анину, установленный на станине с возможностью вращения вокруг своей оси стол для размещения на нем контролирчемого колеса, и средства индикации (1 ;
Недостат:;ами этой машины являются громоядкисть конструкции и ограниченная точность измерений.
Известна также машина для автоматического измерения профиля поперечного сечения зуба и винтовой линии поверхности зуба зубчатого колеса, содержащая станину, поворотный стол с приводом и устройством ко.аирования угла поворота стола, две жестко закрепленные на станине вертикальные направляющие, две вертикальные к..ротки с приводами, каждая из которых ус: новлена на соответствуюш.ей вертикаль,;,;; направляющей, две горизонтальные направляющие, одна из которы.х жестко закреплена на станине, а другая - на вертикальной каретке, две горизонтальные каретки каждая из которых установлена на соответствующей горизонтальной направляющей, три дат чика перемещения со щупами, два из которых установлень на горизонтальны.ч каретках, а третий - на одной из вертикальных кареток, и регистрирующее устроГ ство12.
Эта машина является наиболее близкой по те.хнической сущности к изобретению Ол нако она че обеспечивает измерение профи 1я зубчатых колес я /фокоу .- -lanasoHe их диаметрсз, а также ;, .бчатых колес с зубом любой формы.
Целью изобретения является расширение возможностей измерений зубчатых колес с 5 различной формой профиля и различных размеров.
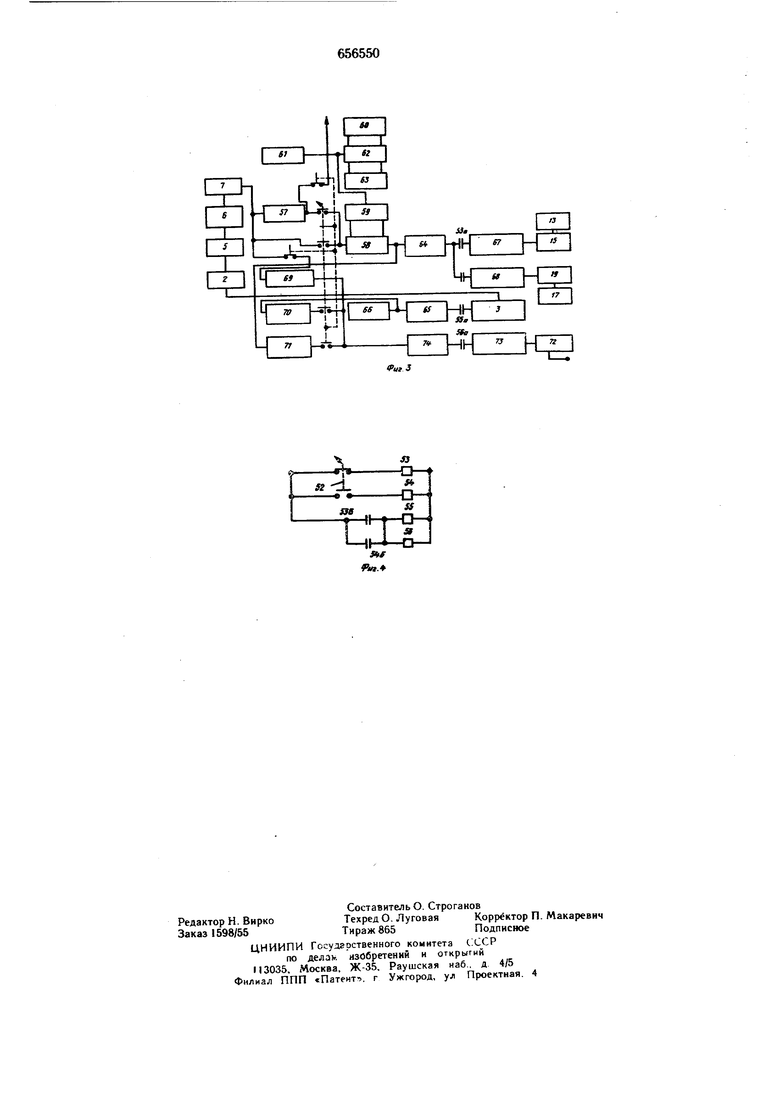
Поставленная цель достигается за счет того, что описываемая машина снабжена электронной схемой для выработки сигна(j лов управления и измерения, входы которой соединены с кодирующим устройством и датчиками перемещений, а выходы с приводами стила и кареток и реги1 грирующими средствами, кодирующее устройство выполнено в виде фрикционной iicptM.iiH. на выходном валу которой установлен дне кретный датчик угла поворота, каждый ал приводов кареток выполнен в виде механизма подачи кареток, упоров для фиксации крайних положений кареток и электрического шагового двигателя, соединенного с входным валом механизма, а, датчики перемещения выполнены в виде индуктивных дифференциальных преобразователей. На фиг. I изображена описываемая машина; на фиг. 2 - привод каретки; на фиг. 3 - блок-схема для выработки сигналов управления и измерения; на фиг. 4 - реле выбора рода работы. Машина для автоматического измерения профиля поперечного сечения зуба и винтовой линии поверхности зуба зубчатого колеса содержит станину 1, поворотный стол 2 с приводом, состоящим из электродвигателя 3 и коробки передач 4, и устройство кодирования угла поворота стола 2, выполненное в виде фрикционной передачи, состоящей из базового колеса 5. ведомого колеса 6 и собственно кодирующею устройства 7. Диаметр ведущего колеса 8 коробки передач 4 привода стола равен диаметру ведомого колеса б кодирующего устройства. Базовое колесо 5 крепится на валу 9, который, в свою очередь, соединяется со столом 2 так,что стол приводится во вращение вместе с колесом 5. На станине i жестко акреп; ены две вертикя.;ь.чые направ..:яюшие 10 и 11 и гориаонтальная направляющая 12. На вертикальной направляющей 10 установлена каретка i3, снабженная измерительным датчиком перемещения 4 и приводом -5, на вертикальной направляющей 1 - каретка 16 с приводом (на фигурах не показан), а горизонтальная направляющая 12 имеет каретку 17 с датчиком перемещения 18 и приводом 19. Горизонтальная направляющая 20 установлена на вертикальной каретке 16. На направляющей 20 крепится клретка 21, которая имеет датчик перемещения 22 и привод 23. Датчики перемещения 14. 18 и 22 выполнены в виде индуктивных диффе ренциальных преобразователей. Приводы каретки выполнится в виде ме ханиз.ма поДачи каретки, упоров для фиксации крайних поло.жений кареток и электрического шагового двигателя (двигатель может ;ть другого типа). Д еханизм подачи кареток включает корпус 24, эксцентрик 25, рычаг 26, жестко связанный с эксцентриком 25, замок 27, рычаг 28 и болт 29, который крепит рычаг 28 к корпусу каретки 21. На кронщтейнах 30 и 31 установлены упоры 32 и 33 для фиксации кареток в крайних положениях, снабженные концевыми выключателями 34, 35, взаимодействующими с .к(ч ГКО снм (ЛИНОЙ I- корпусом п.1астинои кгфетки Приводигся в 1ви/кени1 каретка 21 с помощью 1ви1иге1я 37. закрепленного на кронштейне i8, коробки передач 39, муфты сцепления 40 и гормо.жого устройства 41. Эксцентрик 25 крепи гея на выходном валу 42 муфты 40 Для ручного перемещения каретки 21 используется устройство, включающее щтурвал 43. вал 44. зубчатые колеса 45 и 46. вал 47 с червячным колесом 48 и зубчатая рейка 49. Винтовые пружины 50 и 51 предназначены для того, чтобы останавливать каретку в одном л том же переднем и заднем крайних положениях при каждом цикле работы. Электронная схема для выработки сигналов управления и измерения включает переключатель 52. реле 53 56. с контактами 53а. 536. 54а. 546. 55а, 56а. блоки умножения 57 и 58, двоичный счетчик 59, цифровые переключатели 60. импульсный генератор 61. двоично-кодированный десятиричный счетчик 62. устройство 63 вывода данных, блок управления 64 шаговыми двигателями приводов кареток 13 и 17, блок управления 65 двигателем 3 привода стола 2, импульсный генератор 66. Блок управления 64 включает в работу щагозые двигатели 67 и 68 приводов кареток 13 и 17. снабженных датчиками перемещения 14 и 18. измеряющими соответственно винтовой шаг зубчатогг колеса н эвольвентный профиль зубьев. Регис-:рируюшее устройство уэшнны снабжено собстзекной схемой управления .и содержит блок умножения 69. связа.чный через одну пару переключателя 52 с кодирующим устройством 7, блоки умножения 70 и 71, обеспечивающие умножение и.мпульсов на фиксированный коэффициент для синхронизации работы записывающего устройства 72 с линейным движением датчиков 18 и 14, щаговый двигатель записывающего устройства 73 с блоком управления 74. Описываемая машина работает следующим образим. KoanpyKJmee устройство 7 крепится к поворотномч , го.U . кп1г)рыи юддерживает и (Меряемо - убчатш колесо- 1,тол приводится во вращение лтектродвигателем 3 переменным чистом оборотов, а кодирующее уст ройство 7 выдает определенное число импульсов за один оборот стола Общее число импульсов делится на число зубьев в зубчатом колесе Датчик перемещения 22 располагается во впадине между ибьям.и колеса на соответствующей глубине Затем машина запускается и стол начинае вращаться так. что щуп входит в контакт зубом колеса. В тот момент, когда щуп датчика 22 в.ходит в контакт с зубом, перо самопишущего при бора регистрирующего устройства переме щается к центру бумаги для записи, d щуп вместе с датчиком вытягивается H.S ибчатого колеса Это управление г).- цеств.яет счетчик (на фигурах не показан), который отсчитывает импульсов кодирующего устройства 7. Поворотный стил 2 начинает поворачиваться и, после отсчета определенного числа импульсов на зуб, щуп датчика входит в следующую впадину между зубьями так, что его ось вновь находится вдоль линии истинного показателя. Когда щуп ВХОДИТ в контакт со следующим зубом, сигнал от индуктивного дифференциа льного преобразователя датчика 22 посылается к регистрирующему устройству. Так делается отметка, которая обозначает смещение конца щупа от его номинальной точки положения. Кчк только счетчик достигает отсчета 360°, машчна останавливаемся, датчик вытягивается i-.-г зубчатого колеса и счетчик устанавливаетсЛ я исходное положение. Датчик 22 с KSfjKiTKofi 2 перемеш.ается вперед и назад с чо&Го-. ью а.ви1ателя 37, который, осуществляя это -.-р мещение, постоянно подготавливает взаилюД птвие концевых выключателей 34 я 35 с пластнплк 36. Работок машины при измерении впадин управляют три триггера (на фигурах не показаны). Один триггер управляет мчфтой сцеплении 40, другой триггер-тормозным устройством 4, а третей регулирует рабопу записывагощег-о устройства 72. Измерение БИНТОВОГО шага зубчатого колеса или эзольвентно о профиля зуба осушествляется определением положения конгактов многопозиционного переключателя 52. Когда данный переключатель находится з положении измерения шага колеса, вертикальное движение каретки 13 сннхрони-зируется с врйшате.;ьныу движением поворотного стола 2. При этом срабатывает реле 53, замыкается контакт 53а, и шаговый двигатель 67 привода харетки 13 приводится в действие. В положении пеоеклю ателя F2. предназначенном для измерения (вольвентного профиля, с впащз ельным движением стола 2 синхрониз; руется горизонтальное движение каретки 17 При это.м срабатывает реле 54. замыкается контакт 54а, и шаговый двигатель 68 привода каретки 17 приводится в действие. Проводами каретки управляет блок улравлеиия -34. Предварительно в двоичный гчртчик 59 введен коэффициент, необходк:,.. i для регулирования блока умножения 58 как Л.ЛЯ эвольве.чтного. так и винтового контрольных циклов. Эти коэффициенты вводят ..я. в -четчик 59 с помощью цифровых переключателей 60, импульсного генератора 61 н счетчика 62 $стройство 63 вывода данных в цифровой форме выдает негферывную информацию о содержании счетчика 62 Двоичный счетчик 5S первоначально на.чодится в положеНИИ йулевого счетчика, когда счетчик 62 устанавливается на огсчет. соответствующий цифровым переключателям 60 Двоичный счетчик 59 считает в прямом наиравлоинц и продолжает отсчет до ге пор. пека не достигается отсчет, ус 1анг влнваемый переключателями 60 В -1ТОГ М( шжачани.я очегчи КЗ 62 имеют нулевое значение Таким образом, при прави. к)фф1111иенте умножения блок умножения 58 подает импульс к блоку управления 64 шаговым дь,.гателем в соответствии с предварительно установ.1ен ньтм коэффициентом в переключателя.х 60. в силу чего обеспечивается требуемая синхронизация стола 2 и кареток 13, 17 Когда переключатель 52 находится в эвольвентном положении, блок умножения 57 в работе не участвует, а импульс от кодирующего устройства 7 непосредственно поступает к блоку умножения 58 Это делается потому, что датчик измерения винтового lua-a 4 .;олжен приводиться в .движение с более высокой скоростью, чем вольвентный датчик 8 Датчик 22 может использоваться для и.чглерений зубчатых колес как наружного, так и внутреннего зацепления При измерении параметров КОЛРС внутреннего зацепления используется специальная С-образная насадка 75. Таким образо.м, введен1 е в конструкцию мащины электронной схемы для выработки сигналов управления н измерения, а также выполнение кодирующего устройства в виде фрикционной пе{)едачи, а датчика /iepe%;eme ния - в виде индуктивного диффсрен 1;а,1ь кого преобразователя дает возможнисгь юс таточно качественно измерять параметры зубчатых колес с различной формой профи.чя зуба и различных размеров. Формула изобретения .Машина для автоматического измепеняя профиля поперечного сечения и 3i-:ji товой линии поверхности Гкттог( колеса, содержащая станину, овс);.ч.тныи. ст.л с приводом и с устройстз(): киД1фС в: н1 Я .;ла поворота стола, две жестко laKpetMUiiu-ie на станине вертикс..ьные ь;а;фаз.-як)1ц;;о. .шо вертикальные каретки с Г1рив().:ам11. каждая из которых установлена на оответствчющей вертикальной нагфавляюшей. две гори.чон тальные направляющие, о.дна и. котпры жестко закреплена на станине, а на вертикальной каретке, две гори ()iтaльные каретки. из которых чстанон.к на на соответствующей горизонтальней правляющей, три. датчика перемещения со щупами, два из которых устанозлены на горизо тальных каретках, а третий ьа o.i ной и.ч вертикальных кареток и pt-i и TPJ-P IOщее чсгройство. свяАан.чое v на аатчиками от luчaюu n.ч.ч - . c.ibK)
|мо1лирения возможностей ичмерсния )убча 1ЫХ колес различной формой профиля у. и различных размеров, ()Н.а 1-нлбж(ч)а и ктронной схемой 1ЛЯ выработки iш мгьчог чправления и измерения, входы которой юе4Ииены кодирующим устройством и дат чиками перемещений, а выходы с приводами стола и кареток и регистриру1()1цмми средствами, кодирующее устройство выполнено в виде фрикционной передачи, на вычодном валу которой установлен дискретный датчик угла поворота, каждый из при водов кареток выполнен в виде мь-ханитма
12
18
17
v -tU-W Щ, 2д
подачи каретки, упоров для фиксации крайних положений Kapt ГОК и электрического шаговогь двигателя, .соединенного г влодЧ1,1м lid.iijM механизма, а датчики перемеше НИИ выполнены в виде индуктивного дифференциального преобразователя.
Источники информации, принятые во внимание при экспертизе
1Патент США № 2998657, кл. 33- 179.5, Г(И.
2Патент США (по заявке № 2055081 )28. к.1 G 01 В 7/28, 1973.
гз
21
t г
-X
а
