i
Изобретение относится к автоматизации загрузки рабочих машин крупными тучными заготовками с отношением длины к диаметру больше трех (E/d 3) и ожет быть использовано в машинострои- 5 ельной и приборостроительной промыш-ленности.
Известны бункеры с ножевыми захватами, в которых захват, находясь в нижней части бункера, захватывает не- 10 большое количество деталей и поднимает их вверх до уровня лотка накопителя l .
В лотке-накопителе детали могут перемещаться самотечным, полусамотечным или принудительным способом транспортирующими устройствами, которые также являются и накопителями.
Данные устройства не обеспечивают надежной ориентации деталей, подан- 20 ных ножевым захватом бункера в лотокнакопитель навалом.
Известны также загрузочные устройства, содержащие емкость и наклонный лоток с ворошителями в виде пластин, 25 связанных с рычажно-шарнирным механизмом j.
Недостатком этих устройств является тс, что они не обеспечивают высокой вероятности поштучного захвата 30
указанных заготовок после их прохождения по лотку, так как ворошители, совершающие в наклонном лотке только подъем и опускание, не осуществляют подготовки заготовок к захвату, т.е. их предварительную ориентацию.
Цель изобретения - увеличение вероятности захвата заготовок.
Это достигается тем, что в предложенном устройстве ворошители наклонного лотка выполнены с возможностью перемещения по замкнутой траектории прямоугольной формы навстречу один другому в плоскости, перпендикулярной плоскости наклонного лотка, с расстоянием между ворошителями больше двух диаметров заготовок, но меньше их длины.
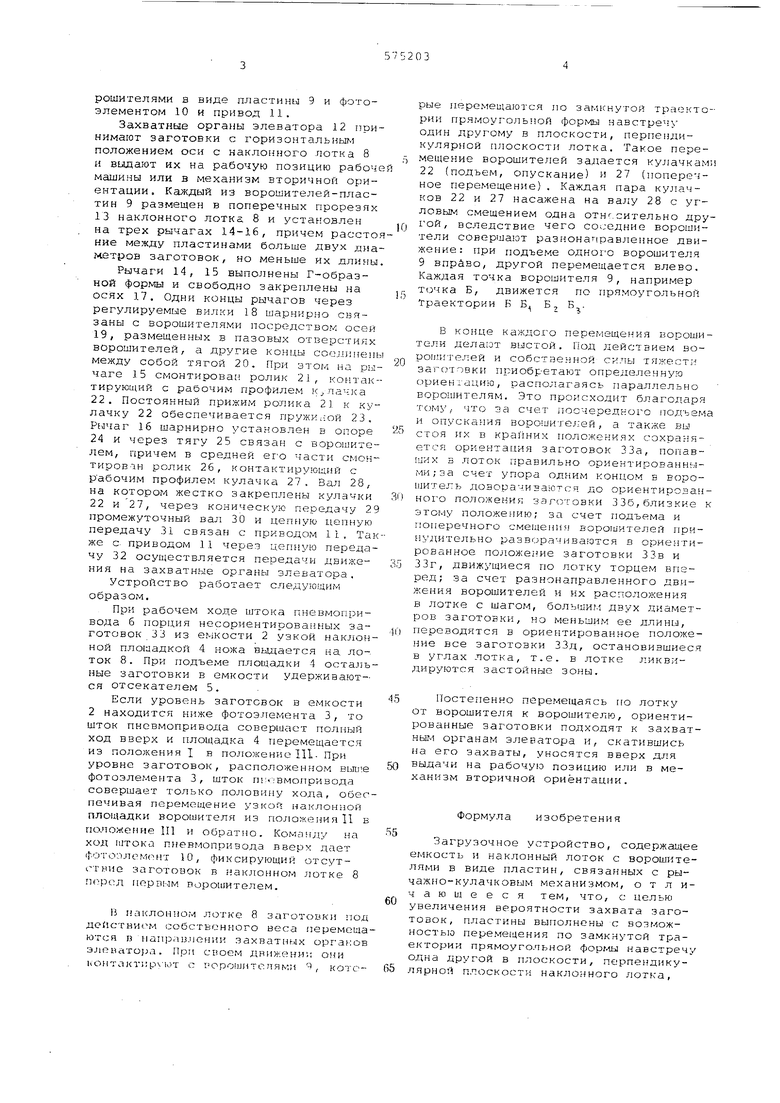
На фиг.1 изображен общий вид описываемого устройства в профильной проекции; на фиг.2 - разрез А-А фиг.1 на фиг.З - схема предварительного ориентирования заготовок.
Загрузочное устройство содержит основание 1, емкость 2 с фотоэлементом 3, Ножевой захват, состоящий из узкой наклонной площадки 4 с отсекателем 5 и пневмоприводом 6, вертикальную стенку 7, наклонный лоток 8 с ворошителями в виде пластины 9 и фотоэлементом 10 и привод И. Захватные органы элеватора 12 гшинимагот заготовки с горизонтальным положением оси с наклонного лотка 8 и видают их на рабочую позицию рабоче машины или в механизм вторичной ориентации. Каждый из ворошителей-пластин 9 размещен в поперечных прорезях 13 наклонного лотка 8 и устаьювлен на трех рычагах 14-16, причем рассто ние между пластинами больше двух диа метров заготовок, но меньше их длины Рычаги 14, 15 выполнены Г-образной формы и свободно закреплены на осях 17. Одни концы рычагов через регулируемые вилки 18 шарнирно связаны с ворошителями посредством осей 19, размещенных в пазовых от1зерстиях ворошителей, а другие концы сосдпиепы между собой тягой 20. При этом на ры чаге 15 смонтирован ролик 21, контак тирую;ций с рабочим профилем к,. па-:ка 22. Постоянный прижим ролика 21 к кулачку 22 обеспечивается пружигюй 23. Рычаг 16 шарнирно установлен в опоре 24 и через тягу 25 связан с ворошителем, причем в средней егО части смонтирован ролик 26, контактирующий с рабочим профилем кулачка 27. Вал 28, на котором жестко закреплены кулачки 22 и 27, через коническую передачу 2 промежуточный вал 30 и цепную цепную передачу 31 связан с приводом 11, Так же с. приводом 11 через цепную передачу 32 осуществляется передачи движения на захватные органы элеватора. Устройство работает следующим образом. При рабочем ходе штока пневмопривода 6 порция несориентированных заготовок 33 из емкости 2 узкой наклон ной площадкой 4 ножа Т31ядается на лоток 8. При подъеме площадки 4 осталь ные заготовки в емкости удерживаются отсекателем 5. Если уровень заготовок в емкости 2 находится ниже фотоэлемента 3, то шток пневмопривода совершает полный ход вверх и площадка 4 перемещается из положения Т в положение 111. При уровне заготовок, расположенном вшпе фотоэлемента 3, шток П1 -вмопривода совершает только половину хода, обес печивая перемещение узкой наклонной пло11 адки ворошителя из положения И в положение 1П и обратно. Команду на ход штока пневмопривода вверх дает 10, фиксирующий отсутгтыие заготовок в наклонном лотке 8 пород перБ1-.1м ворошителем. В аклонном лотке 8 заготовки под действием собственного веса перемеща ются в 11ап заиленин захватных oprat;oB элеватора. При своем движени;; они ионтакгпрчыт с 1оро1иитепям;1 Ч , котсые перемещаются по замкнутой траектории пряг оугольной формы навстречуодин другому в плоскости, перпендикулярной плоскости лотка. Такое перемещение ворошителей задается кулачками 22 {подъем, опускание) и 27 (поперечное перемещение). Каждая пара кулачков 22 и 27 насажена на валу 28 с угловым смещением одна относительно другой, вследствие чего со;;едние ворошители совершают раЗ 1Она 1равленное движение: при подъеме одного ворошителя 9 вправо, другой перемещается влево. Каждая точка ворошителя 9, например Точка Б, движется по прямоугольной Траектории Б Б Б, Б . В конце каждого перемещения ворошители делают ВЕРСТОЙ. Под действием ворошителей и собственной силы тяжести заготовки приобретают определенную ориен:ацию, располагаясь параллельно ворошителям. Это про сходит благодаря тому., что эг1 счет поочередного подъема и опускания ворО иителей , а также вы стоя их в крайних положениях сохраняется ориентация заготовок ЗЗа, попавших в .поток правильно ориентированными; за счет упора одним концом в ворошитель дозорачиваю тся до ориентированного положения заготовки 336,близкие к этому положению; за счет подъема и поггеречного смещения ворошителей принудительно разворачиваются в орие.чтированное положение заготовки ЗЗв и ЗЗг, движущиеся по лотку торцем вперед; за счет разнонаправленного движения ворошителей и их расположения в лотке с шагом, большим двух диаметров заготовки, но меньши.м ее длины, переводятся в ориентированное положение все заготовки ЗЗд, остановившиеся в углах лотка, т.е. в лотке ликвидируются застойные зоны. Постепенно перемещаясь по лотку от ворошителя к ворошителю, ориентированные заготовки подходят к захватНЫГ.1 органам элеватора и, скатившись на его захваты, уносятся вверх для выдачи на рабочую позицию или в механизм вторичной ориентации. Форму.па изобретения Загрузочное устройство, содержащее емкость и наклонный лоток с ворошителями в виде пластин, связанных с рычажно-ку.пачковым механизмом, отличающееся тем, что, с целью увеличения вероятности захвата заготовок, пластины выполнены с возможностью пере.мещения по замкнутой траектории прямоугольной форг.1ы навстречу одна другой в плоскости, перпендикулярной плоскости наклонного лотка.
прнчем рас:стоян.ие мпжду пластинами больше двух диа..етров заготовок, -к меныие их длины,
Источники информации, принятые; во внимание, при экспертизе:
1.Л . П . Белоу;;ов и др. Автомати зация процсзссов в ма1 } ностроении.
Высшая школа, 1973, с.86.
2.Авторское свидетельство
.-, 426791, кл. Б 23 с 7/00, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи заготовок | 1973 |
|
SU500857A1 |
| Элеваторное бункерное загрузочное устройство | 1973 |
|
SU471991A1 |
| Загрузочное устройство | 1985 |
|
SU1268369A1 |
| Установка для загрузки нагревательных печей | 1980 |
|
SU934180A1 |
| Устройство для поштучной подачи заготовок в рабочую зону пресса с одновременным их смачиванием | 1987 |
|
SU1493365A1 |
| Устройство для поштучной выдачи заготовок | 1977 |
|
SU709224A1 |
| УСТРОЙСТВО ПОДАЧИ ДЕТАЛЕЙ | 2013 |
|
RU2533980C1 |
| Загрузочно-ориентирующее устройство | 1985 |
|
SU1340985A1 |
| Автоматическая роторная линия для сборки радиочастотных соединителей | 1978 |
|
SU785924A1 |
| Устройство для выдачи ступенчатых цилиндрических заготовок | 1981 |
|
SU961921A1 |

31 Y///t ///// /////1///////Y///////////, yY,//j //y//f///l //A /Vy //7/7/ / j/ .............,......j.......... ...,.
SO /4 Zd 7го Г5 zi 22 28 27
16
Фиг. Z
Jjf 33a
