(54) ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ СЛЕДЯШМЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ МНОГОКАНАЛЬНЫЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2211962C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2190129C2 |
| Электрогидравлический следящий привод с объемным управлением | 1974 |
|
SU517879A1 |
| Зажимное устройство | 1986 |
|
SU1324803A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ЦИФРОВАЯ СЛЕДЯЩАЯСИСТЕМА | 1972 |
|
SU330262A1 |
| Электрогидравлический следящий привод системы автоматического управления органами стабилизации движения судна | 1976 |
|
SU610725A1 |
| ВСЕСигиЗНАЯ | 1973 |
|
SU366998A1 |
| Высокоскоростной горизонтальный молот с двухсторонним ударом | 1977 |
|
SU659269A1 |
Изобретение относится к следящим системам автоматического регулирования.
Известны электропневматические (электрогидра в л ичс с кие, электропневмогидравлические) следящие нриводы позиционного типа, обеспечивающие установку подвижного элемента в некоторое положение в зависимости от значения входного сигнала. Приводы содержат релейные элементы, образующие с усилителем и интегрируюниш элементом внутренний замкнутый контур привода 1.
Однако такие приводы недостаточно надежны.
Наиболее близким техническим решением к изобретению является электропневматический следян-1ий привод, содержащий распределительные золотники с управляющими камерами, выходы которых подключены к полостям серводвигате., электромагнитные клапаны, обмотки управления которых подключены к выходу сумматора, соедпненного с входным каналом п датчиком обратной связи по положению серводвигатс.тя, и каналы слива 2.
В статическом положении привода релейные электромагнитные клапаны находятся в колебагельном режиме, обусловленном принятой импульсной схемой управления привода. Эти колебания локализованы во внутреннем контуре и
не передаются на золотник. При этом в колебательном режиме находится не только механическая часть (заслонки), но и электрическая часть клапанов, что также ухудшает надежность привода и увеличивает расход рабочей среды.
Целью изобретения является повышение надежности привода и уменьшение расхода рабочей среды.
Эта цель достигается тем, что в предложенном приводе распределительные золотники установлены в каналах с.тива, а в п,пунжерах распределительных золотников выполнены Г- образные каналы, через которые входы управляющих камер распределительных золотников соединены с выходами электро.магнитных клапанов, а выходы-с каналами слива.
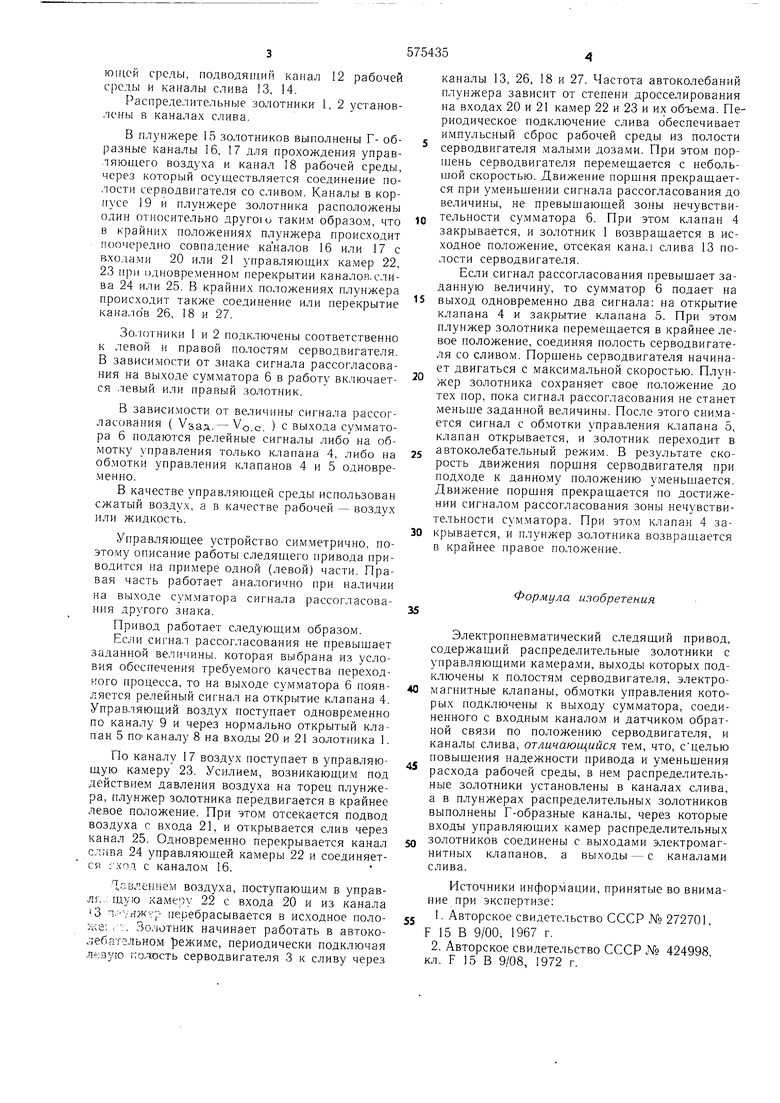
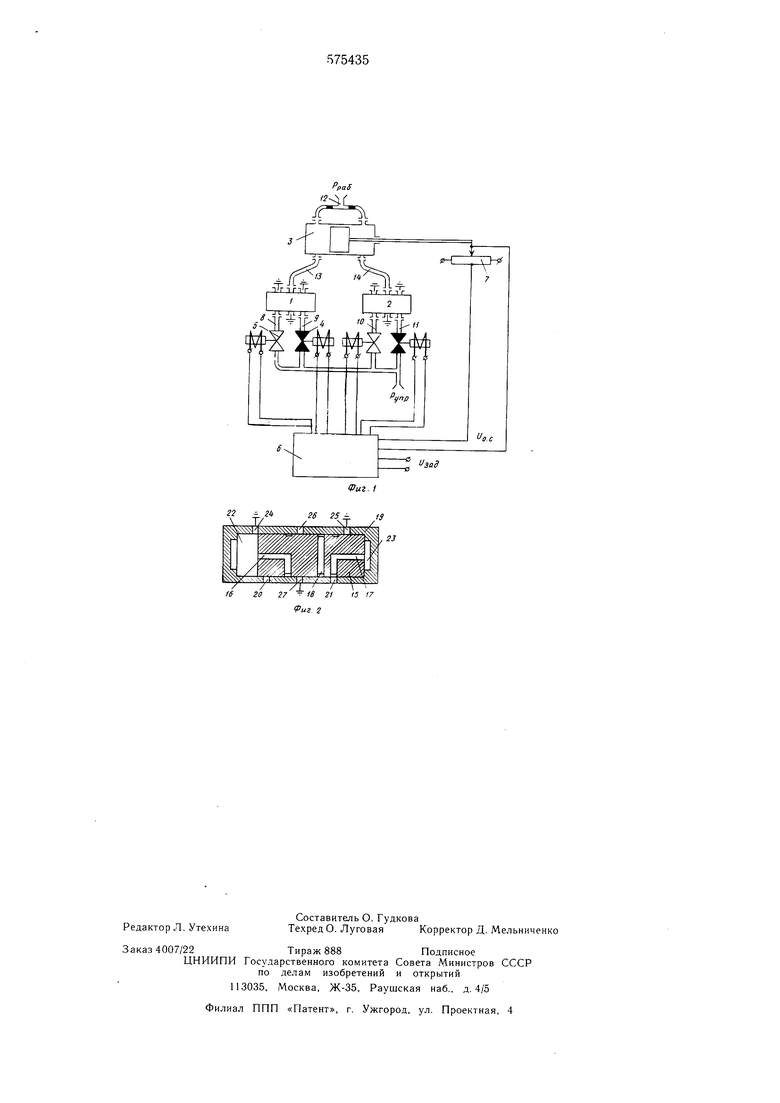
На фиг. 1 дана схема электродина.мическою следящего привода; на фиг. 2 - схема распределительного золотника.
Электропневматический следящий привод содержит распределительные золотники 1, 2, серводвигатель 3. электромагнитный клапан (нормально закрытый) 4, электромагнитный клапан (нормально открытый) 5. сумматор (трехпозиционный релейный усилитель) 6, датчик 7 обратной связи по положению серводвигателя, подводян ие каналы 8-11 управляЮ1ЦСЙ срслы, подводящий канал 12 рабочей среды и каналы слива 13, 14.
Распределительные золотники I, 2 установлены в каналах слнва.
В плунжере 15 золотников выполнены Г- образные каналы 16, 17 для прохождения управляющего воздуха и канал 18 рабочей среды, через который осуществляется соединение полости серводвигателя со сливом. Каналы в корпусе 19 и плунжере золотника расположены один относительно другою таким образо.м, что в крайних положениях плунжера происходит поочередно совпадение каналов 16 или 17 с входа.ми 20 илн 21 управляюи их ка.мер 22, 23 при одновре.менном перекрытии каналов.слива 24 или 25. В крайних положениях плунжера происходит также соединение или перекрытие каналов 26, 18 и 27.
Зо.ютники 1 и 2 подключены соответственно к левой и правой полостям серводвигателя. В зависи.мости от знака сигнала рассогласования на выходе сум.матора 6 в работу включается левый или правый золотник.
В зависимости от величины сигнала рассогласования ( Узад.- VQ с. ) с выхода су.мматора 6 подаются релейные сигналы либо на обмотку управления только клапана 4, либо на об.мотки управления клапанов 4 и 5 одновременно.
В качестве управляющей среды использован сжатый воздух, а в качестве рабочей - воздух или жидкость.
Управляющее устройство симметрично, поэтому описание работы следящего привода приводится на примере одной (левой) части. Правая часть работает аналогично при наличии на выходе сум.матора сигнала рассогласования другого знака.
Привод работает следующим образом.
ЬЗсли сигнал рассогласования не превыщает заданной величины, которая выбрана из условия обеспечения требуемого качества переходного процесса, то на выходе сум.матора 6 появляется релейный сигнал на открытие клапана 4. Управляющий воздух поступает одновременно по каналу 9 и через нормально открытый клапан 5 подканалу 8 на входы 20 и 21 золотника 1.
По каналу 17 воздух поступает в управляющую камеру 23. Усилием, возникающим под действием давления воздуха на торец плунжера, плунжер золотника передвигается в крайнее левое положение. При этом отсекается подвод воздуха с входа 21, и открывается слив через канал 25. Одновре.менно перекрывается канал слпва 24 управляющей камеры 22 и соединяется 1 ход с каналом 16.
Товлением воздуха, поступающим в управл..ц.;ую камеру 22 с входа 20 и из канала 3 -.-7лж---р перебрасывается в исходное поло ке; , . Золотник начинает работать в автоколебательном режиме, периодически подключая Л1:.зую по.гюсть серводвигателя 3 к сливу через
каналы 13, 26, 18 и 27. Частота автоколебаний плунжера зависит от степени дросселирования на входах 20 и 21 камер 22 и 23 и их объема. Периодическое подключение слива обеспечивает импульсный сброс рабочей среды из полости серводвигателя .малыми дозами. При этом порHjeHb серводвигателя перемещается с небольшой скоростью. Движение порщня прекращается при у.меньщении сигнала рассогласования до величины, не превышающей зоны нечувствительности су.мматора 6. При этом клапан 4 закрывается, и золотник 1 возвращается в исходное положение, отсекая канал слива 13 полости серводвигателя.
Если сигнал рассогласования превыщает заданную величину, то сумматор 6 подает на
выход одновременно два сигнала: на открытие клапана 4 и закрытие клапана 5. При этом плунжер золотника пере.мещается в крайнее левое положение, соединяя полость серводвигателя со сливом. Порщень серводвигателя начинает двигаться с максимальной скоростью. Плунжер золотника сохраняет свое положение до тех пор, пока сигнал рассогласования не станет меньще заданной величины. После этого сни.мается сигнал с об.мотки управления клапана 5, клапан открывается, и золотник переходит в
автоколебательный режим. В результате скорость движения порщня серводвигателя при подходе к данному положению уменьщается. Движение порщня прекращается по достижении сигналом рассогласования зоны нечувствительности сумматора. При этом клапан 4 закрывается, и плунжер золотника возвращается в крайнее правое положение.
Формула изобретения
35
Электропневматический следящий привод, содержащий распределительные золотники с управляющими камерами, выходы которых подключены к полостя.м серводвигателя, электромагнитные клапаны, об.мотки управления которых подключены к выходу сумматора, соединенного с входным каналом и датчико.м обратной связи по положению серводвигателя, и каналы слива, отличающийся тем, что, сцелью повыщения надежности привода и уменьщения
расхода рабочей среды, в нем распределительные золотники установлены в каналах слива, а в плунжерах распределительных золотников выполнены Г-образные каналы, через которые входы управляющих ка.мер распределительных
золотников соединены с выходами электромагнитных клапанов, а выходы - с каналами слива.
Источники информации, принятые во внимание при экспертизе:
