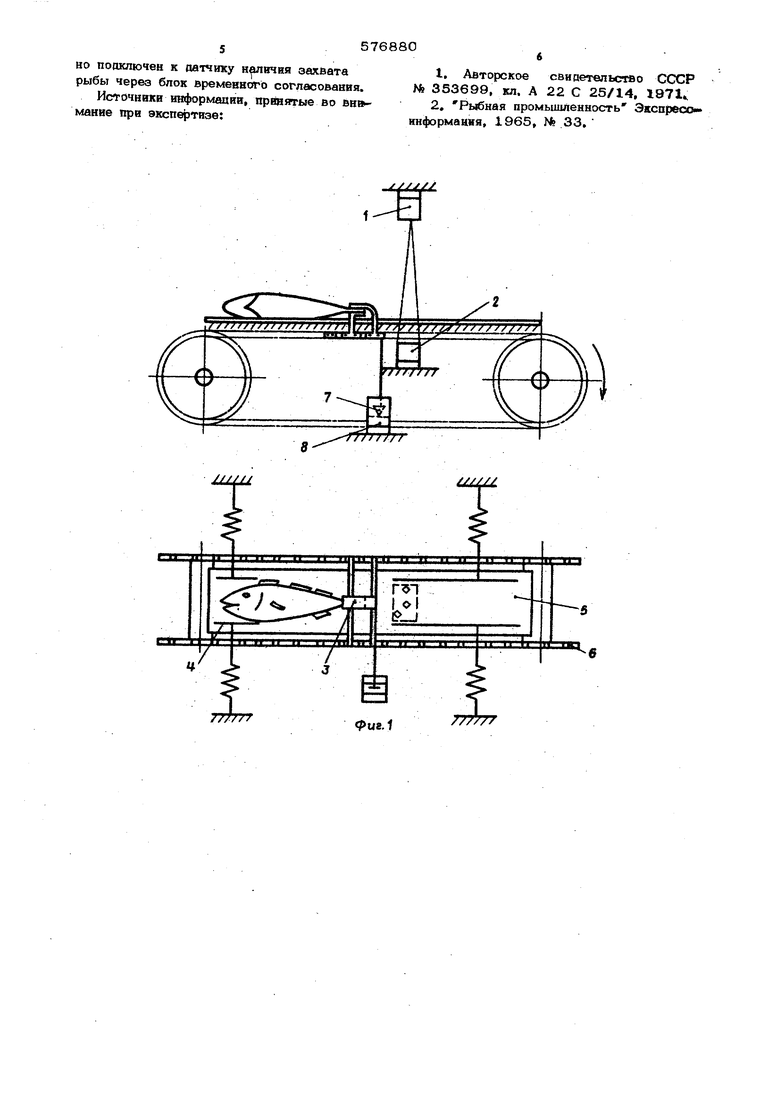
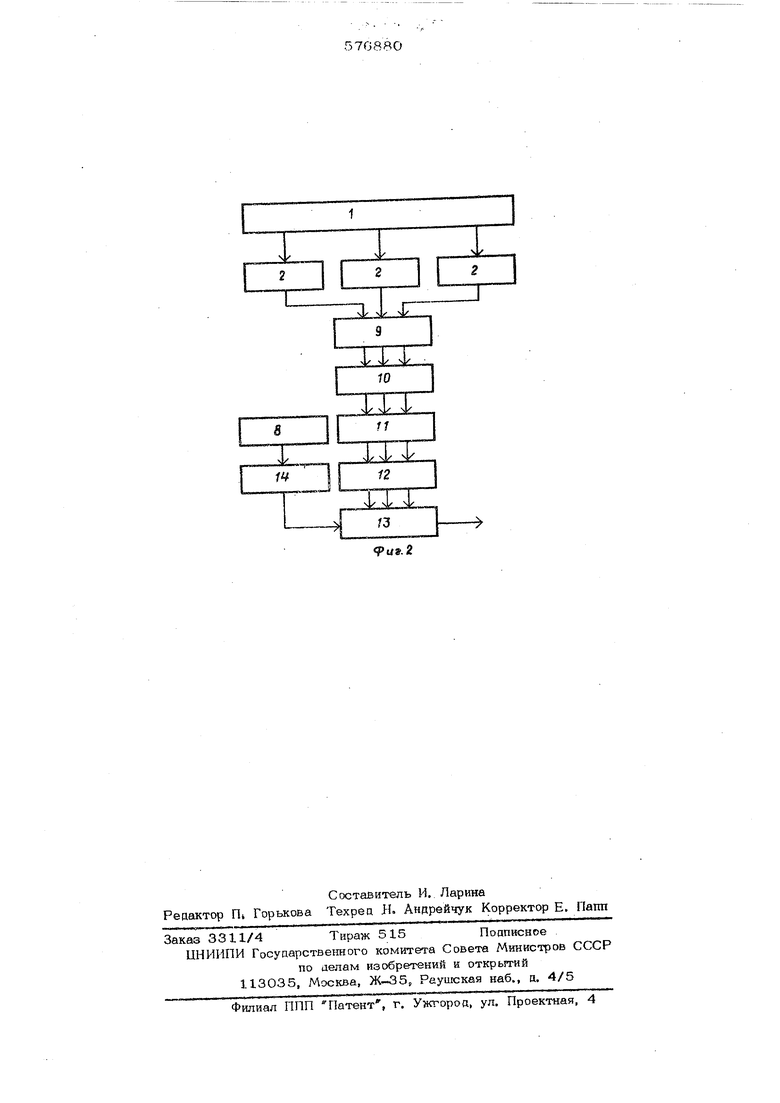
пинен с логической схемой И, вход которой одаоБремеино подключен к датчику наличия захвата рыбы через бпок временного согпа соеания. На фиг. 1 изображено устройство для транспортирования рыбы относителъло источника ионизирующего излучения и детекторой; на фиг, 2 - структурная электрическая схема предложенного устройства. Устройство содержит источник 1 ионизирующего излучения, детекторы 2, захваты 3, транспортирующие рыбу хвостовым плавв НИКОМ вперед относителыю источника ионизирующего излучения и детекторов, центрирующие планки 4, которыми рыба ориенти- руется вцоль позвонковой линии, неподвижную плоскость 5, прозрачную для ионизиpyiomero излучения, транспортирующий орган (цейной транспортер) 6, фпажЬк 7, который при движении входит в прорезь ще левого датчика 8 наличия захвата. Устройство работает следующим образом. Рыба транспортируется захватом 3, укрепленным на цепном транспортере 6, хвостовым плавником вперед отк-осительно источника 1 ионизирующего излучения и детекторов 2. Детекторы расположены по дуге, повторяющей форму плечевых костей рыбы.. В силу разной поглощающей способности мыщечной и костной ткани (костная ткайь поглощает в 10 раз С1шьнее мыщечной тка ни, одной и той же толщины) сигнал с детекторов имеет разную амплитуду, Вследствие того, что плечевые кости па форме в скелете рыбы не имеют себе подобных, в какой-ого момент времени будет наблюдаться одновременное перекрыт 1е пле чевыми костями декекторов, расположенных по цуге плечевых костей. Момент совпадения сигналов от трех детекторов реализуется Электрической схемой. Сигналы с детекторов 2 поступают в блок 9 согласования, предназначенный .для согласования выходных сопротивлений детекторов 2 с входаыми сопротивлениями блока 10 усилителей, с помощыо которых сигналы усиливаются и поступают вблок 1 сравнения,Параметры канальных усилителей могут отличаться по своим значениям, поэтому каждый канал сравнивается со своим порогом срабатывания, который настроен на костную ткань рыбы,. с выхода блока 11 сравнения сигналы поступают в блок 12 запоминания, где запоминаются на короткое время, которое вы(бирается исходя из скорости транспортирования рыбы и предъявленной точности нахождения плечевых костей у рыбы. Сигналы с блока запоминания поступают на три входа логической схемы 13 И,, которая pfteaлизует совпадение сигналов во времени. При движении захвата 3 Ьудет наблюдаться в какой-то момент времени перекрытиепотока ионизирующего излучения этим захвбпгом, и на выходе детекторов 2 может появиться ложный, сигнал. В целях избежания ложных срабатываний при появлении захВ(атов и исключения из Просмотра наиболее узкого начального участка туловища рь1бы, с на каждом захвате установлен металлический флажок 7, который при движении входит в прорезь щелевого датчика 8 Наличия захвата, сигнал с которого поступает на вход блока 14 временного согласования. Выходной сигнал с блока 14, дающий запрет на время, .зависящее от шир1даы захвата, скорости транспор- тирования и вида обрабатываемой рыбы (то есть, какой начальный участок туловища рыбы необходимо исключить из просмотра в целях помехозащищенности измери тельлой схемы), поступит на вход схемы 13 И. После прохождения захватом и начальным участком туловища рыбы зоны действия детекторов на вход схемы И подается разрещаюший сигнал. Сигнал с выхода схемы И может быть реализован исполнительным механизмом обезглавливания рыбы. Применение предлагаемого устройства псхзволит более точно определять координаты плечевых костей на туловище рыбы, что, в свою очередь, позволит увеличить выход пищевой продукции на 5%, Фо.рмула изобретения Устройство сшя нахождения плечевых костей на туловище рыбы, содержащее источник ионизирующего излучения, детекторы ионизирующего излучения и транспортарующий орган, отличающееся тем, что, с целью повыщения точности определения координат плечевых костей на туловище рыбы и увеличения выхода пищевой рыбной продукции, оно снабжено дат чиком наличия захвата рыбы, логической схемой И и блоками запоминания, сравне-; ния, усиления и согласования, при этом детекторы расположены по дуге, повторяющей форму плечевых костей рыбы, и соединены посредством блоков согласования, усиления и сравнения с входогД блока за поминания, а выход последнего - с логической схемой И, вход которой ооновремен-:
но подключен к датчику захвата рыбы через блок времевного согласования.
Источники информации, принятые во внимание при экспе|зтнзе:
1. Авторское свидетельство СССР № 353699. кл. А 22 С 25/14, 187U
2, Рыбная промьшшенность Эксаресо кнформацня, 1965, t 33, 
УУ/УУУ
Фив.1
