Изобретение касается тренажеров для обучения и тренировки в управлении курсом суди а.
Известны тренажеры для обучения, содержащие устройство ввода командной информации, состоящее из поста управления рулем, пульта управления тренаже|ром, счетнорещающего блока с интеграторами угловой скорости и угла дрейфа, блока нерегулярных возмущений для вариации xapaKTeipHc-raK случайдого сигнала и динамической модели рулевого механизма, предназначенной для формировалия сигнала, имитирующего угол перекладки руля. Уст1ройство соде1ржит также сигнальный блок, предназначенный для отработки угла курса, информап;иан.ную .модель с репитерами гирокомпаса и аксиометра, а также блок автоматической оценки.
Однако такие тренажеры не могут обеспечить качественной и эффективной трвнирО:вки обучаемого, так как в них не учитываются действия нелиией;ных факторов, стабилизирующих вращательное движение судна при увеличении его угловой скорости.
Целью изобретения является воспроизведение в тренажере действия факторов, стабилизирующих вращательное движение судна.
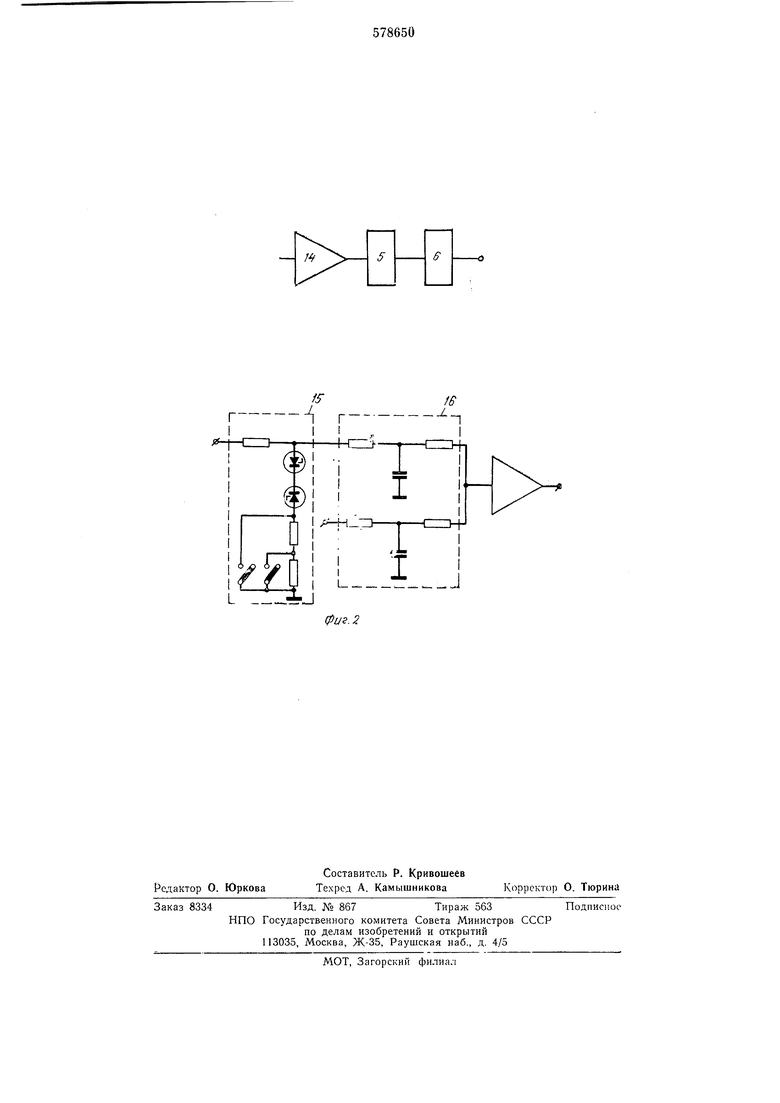
Для этого в предлагаемом аудиторном тренажере рулевого в счетно-рещающем блоке выход интегратора угловой скорости соеинен через резистор с входом интегратора гла дрейфа, при этом параллельно входу инегратора угла дрейфа подключен блок стабилизации напряжения.
На фиг. 1 изображена блок-схема предлагаемого тренажера; на фиг. 2-схема соединения интеграторов.
Тренажер содержит устройство ввода командной информаиии 1, состоящее (ИЗ поста 2 управления рулем, nyvibTa 3 управления тренажером, счетно-рещающего блока 4 с интегратором 5 угловой скорости ii интегратором 6 угла дрейфа (см. фиг. 2), блока нерегулярных :ВОЗмущений 7 и динамической модели 8 рулевого механизма. Устройство содержит также сигнальный блок 9, состоящий из следящей системы 10 отработки угла курса и датчика 11 гирокомпаса, информационную модель 12, содержащую репитер гирокомпаса
и репитер аксиометра с сигнальными лампами (не показан), а также блок автоматической оценки 13.
На фиг. 2 представлена схема включения интеграторов угловой скорости 5 и угла дрейфа 6 на выход сумматора 14, при этом параллельно входу интегратора угла дрейфа 6 подключен блок 15 стабилизации напряжения, соединенный с КС-1Схемой 16. Тренажер работает следующим образом.
Обучаемый, обиаружив в модели 12 шарегеитере гирокомпаса отклонение судна от задатаного курса, 1В:КЛЮЧ:ает через пост 2 управления рулем динамическую модель 8 .рулевого механизма. Выход:ной оипнал в ней изменяется аналолич(но изменению угл-а пе1рекладки руля. Счетно-решающий блок 4 воспринимает сигнал динамической модели 8 « осуществля ет с помощью интепра-торов 5 и 6 (ом. фиг. 2) И1НтегрирО ва1Ние уравнений вращательнюго движения судна. Выходное напряжение счетно-реШаю щего блока 4 И31мвняется аналолично изменению угл-а курса судна и управляет следящей -оистемой 10 отработки курса. В результате этого получает враЩ1ениедатчвк И гирокоМПаса и синхронно с «им репитер гирокомпаса.
П олучен1ная таким образом система управления, замкнутая обучаемого, позволяет ему отрабатывать .навыки в управлении курсом судна. Блок нерегулярных возмущений 7 формирует «а выходе нецрерывный сигнал, имеющ ий сл;учай ный хар:акте,р, я вводит его в счетно-рещающий блок 4, задавая .ынешяие возмущен1ия на судно, возникающие в щтормовых услояиях. Постоянные возмущения задаются с пульта 3 управления транажером инструктором и изменяются по его желанию.
Блок автоматической оценки 13 управляется инструктаром, и после его включения начинается отсчет времени, отсчет числа включений динамической модели 8 рулевого механизма и и.нтелри|рование квадрата рысканья. Последние два параметра выведены на Цiифfpoвoe табло.
Формула изобретения
Аудиторный тренажер рулевого, содержащий устройство ввода 1ком:андной информации, со,стоящее из поста управления рулем, пульта управления тренажврО;М, счетно-решающего блока с интегр.аторами угловой скорости и угла дрейф-а, блока нерегулярных возМуЩввий и дииамйческой модели рулевого механизм1а, сигнальный блок, информационную модель с репитерам|и гирокомпаса и аксиометра и блок автоматической оценки, отлич-ающийся тем, что с целью воспроизведения в тренажере действия фа,кторов, стабилизирующих В|ращательное движение судна, в счетно-решлющем блоке выход интегратора угловой скорости :под;ключен через резистар к входу И1нтелрато|ра угла дрейфа, при этом параллельно входу интегр атора угла дрейфа подключен блок стабилизации напряжения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Аудиторный тренажер по управлению курсом судна | 1975 |
|
SU555733A1 |
| Тренажер для обучения управлению курсом судна | 1985 |
|
SU1355993A1 |
| Тренажер рулевого швертбота типа КЭТ | 1979 |
|
SU947902A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ «СИНИЦА» | 1966 |
|
SU179639A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Устройство для оценки работы рулевого | 1985 |
|
SU1406627A1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
/
L
ff
J
