Изобретение относится к области судовождения, в частности к системам автоматического управления движением морских судов.
Известно устройство (А.С. СССР N 460535), обеспечивающее автоматическое удержание судна на заданном курсе. Стабилизация курса осуществляется по данным гирокомпаса, который является основным источником информации о направлении движения судна. Сигнал текущего курса и его производная поступают на вход суммирующего усилителя, где формируется пропорционально-дифференциальный (ПД) закон управления рулевым приводом.
Рассматриваемый авторулевой обладает следующими недостатками:
- перегружает рулевой привод при появлении на море волнения,
- сигнал курса, снимаемый с гирокомпаса, имеет запаздывание, что снижает запас устойчивости замкнутой системы "судно-авторулевой", т.к. сигнал производной формируется путем дифференцирования сигнала курса, снимаемого с гирокомпаса,
- появление ошибки при движении судна по заданному курсу при боковом ветре и волнении.
Известно устройство управления движением судна (А.С. СССР N 979204, кл. B 63 H 25/04), принятое нами в качестве прототипа, содержащее датчик и задатчик направления движения, датчик угла перекладки руля, блок выработки угловой скорости судна по курсу - датчик угловой скорости судна, выходы которых подключены через суммирующий усилитель к рулевому приводу, недостатки рассмотренного выше аналога присущи также и прототипу.
Задачей, решаемой настоящим изобретением, является создание аппаратуры для автоматического управления движением судна только по информации от приемоиндикатора спутниковой навигационной системы (СНС) и достижение:
- повышенной точности удержания судна при движении по заданной траектории как при спокойном море, так и при сильном волнении на море;
- повышенной надежности и безотказности.
Поставленная задача достигается тем, что в аппаратуру, содержащую задатчик направления движения судна, датчик угла перекладки руля, суммирующий усилитель, блок выработки скорости, дополнительно введены: приемоиндикатор, блок дифференцирования, два интегратора, два сумматора и два множительных блока, соединенных между собой в соответствии с чертежом.
Существенной новизной предлагаемого изобретения является формирование закона управления:
- не по углу курса, а по путевому углу, что достигается использованием приемоиндикатора СНС (в формуле это отличие не обозначено);
- с введением сигнала бокового сноса судна;
- с использованием сигналов оценки скорости изменения путевого угла и оценки скорости изменения бокового сноса судна, пропорционального углу дрейфа.
Функциональная схема предлагаемого изобретения приведена на чертеже.
Аппаратура автоматического управления движением судна состоит из: задатчика направления движения 1, датчика угла перекладки руля 2, суммирующего усилителя 3, рулевого привода 4, блока выработки скорости 5, приемника-индикатора 6, блока дифференцирования 7, двух интеграторов 8, 9, двух сумматоров 10, 11 и двух множителей 12, 13.
В качестве задатчика 1, датчика угла перекладки руля 2 может быть использован любой аналоговый (цифровой) преобразователь угла поворота в электрический сигнал с точностью не хуже 1 процента. В аналоговом варианте реализации аппаратуры в качестве усилителя 3 можно использовать интегральную микросхему типа 140 - УД - 6, блок выработки скорости 5 и блок дифференцирования 7 реализуются также на интегральных схемах типа 140 - УД - 6. Приемоиндикатор 6 (ПИ) спутниковой навигационной системы (СНС) - типа "Волонтер". Интеграторы 8, 9 - реализуются на микросхемах типа 140 - УД - 8, сумматоры 10, 11 - на микросхемах типа 140 - УД - 6, множители - также на интегральных микросхемах с точностью не ниже 5 процентов.
Возможен также вариант реализации предложенной аппаратуры на элементах цифровой техники.
Аппаратура работает следующим образом.
Требуемое направление движения судна задается задатчиком 1. Если это направление не совпадает с текущим направлением движения судна, то на выходе суммирующего усилителя 3 появится сигнал, приводящий к отклонению пера руля судна рулевым приводом 4, при этом начнется поворот судна к заданному направлению движения. При достижении судном заданного направления движения перо руля вернется в нулевое положение.
Рассмотрим, как формируется закон управления рулевым приводом. Сигнал, пропорциональный текущему направлению движения судна, вырабатывается приемоиндикатором (ПИ) 6 и поступает на третий вход усилителя 3, а также на вход блока 5 выработки скорости, который используется для коррекции сигнала угловой скорости судна, вырабатываемой на выходе второго интегратора 9. Тот сигнал поступает на шестой вход усилителя 3. На второй вход усилителя 3 поступает сигнал, пропорциональный углу перекладки руля, с датчика 2. Таким образом на выходе усилителя 3 формируется сигнал, пропорциональный скорости перекладки руля, который и поступает на вход рулевого привода 4:
где (ПУ - ПУ заданный) - текущий путевой угол и заданное направление движения судна; - оценка скорости изменения ПУ;
- оценка скорости изменения ПУ;
δ - угол перекладки руля.
Реализация закона (1) позволяет автоматизировать процесс управления движением судна по заданному направлению, причем сигнал оценки угловой скорости судна не содержит высокочастотных возмущений от морского волнения, в нем также отсутствует запаздывание, возникающее при дифференцировании сигнала угла курса, вырабатываемого гирокомпасом.
В предложенной аппаратуре управление кораблем осуществляется по более сложному закону, который обеспечивает более точное движение по заданной траектории (обеспечивается астатизм к внешним боковым возмущениям). Это достигается введением дополнительно двух сигналов У-бокового отклонения судна, который поступает с ПИ 6 на четвертый вход усилителя 3 и  - оценки скорости бокового отклонения, которая вырабатывается на выходе первого интегратора 8 и поступает на пятый вход усилителя 3. Таким образом, на выходе усилителя 3 формируется сигнал скорости перекладки руля, равный:
- оценки скорости бокового отклонения, которая вырабатывается на выходе первого интегратора 8 и поступает на пятый вход усилителя 3. Таким образом, на выходе усилителя 3 формируется сигнал скорости перекладки руля, равный:
где, кроме сигналов, рассмотренных в зависимости (1), введены:
У - боковое отклонение судна от заданной траектории, - оценка скорости бокового отклонения.
- оценка скорости бокового отклонения.
Формирование оценок.
Оценки скорости изменения бокового сноса и скорости изменения углового направления движения судна вырабатываются на двух интеграторах 8, 9, двух сумматорах 10, 11, двух множителях динамической модели движения судна с коррекцией оценок текущими значениями скорости бокового сноса и скорости изменения углового направления движения судна.
На вход первого интегратора 8 поступают сигналы:
где V - скорость хода судна; - невязка производной бокового смещения и оценки скорости бокового смещения.
- невязка производной бокового смещения и оценки скорости бокового смещения.
На выходе первого интегратора 8 вырабатывается оценка скорости бокового смещения судна.
На вход второго интегратора 9 поступают сигналы:
где  - невязка измеренной и восстановленной угловой скорости судна.
- невязка измеренной и восстановленной угловой скорости судна.
Проведенное моделирование приведенного выше закона управления (2) подтвердило получение высокого качества управления и стабилизации судна на заданной траектории движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2211172C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СИСТЕМА КОМПЛЕКСИРОВАННЫХ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ КОРАБЛЯ | 1993 |
|
RU2065197C1 |
Изобретение относится к судостроению и предназначено для реализации автоматического управления движением морского судна. Аппаратура содержит задатчик направления, датчик угла перекладки руля, суммирующий усилитель, блок выработки скорости. Дополнительно введены приемоиндикатор, блок дифференцирования, два интегратора, два сумматора и два множителя. Формирование закона управления производится не по углу курса, а по путевому углу спутниковой навигационной системы с введением сигнала бокового сноса судна и использованием сигналов оценки скорости изменения путевого угла и оценки скорости изменения бокового сноса судна, пропорционального углу дрейфа. Это позволяет существенно снизить высокочастотные помехи при сильном морском волнении и в итоге повысить надежность и качество управления кораблем. 1 ил.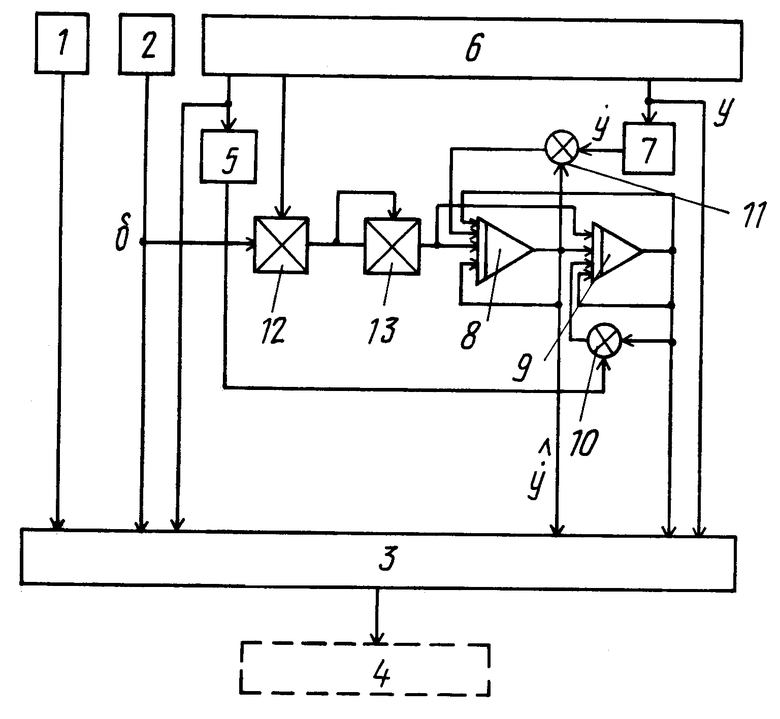
Аппаратура автоматического управления движением судна, содержащая задатчик направления движения, датчик угла перекладки руля, выходы которых подключены к первому и второму входам суммирующего усилителя, выход которого подключен к входу рулевого привода, и блок выработки скорости, отличающаяся тем, что дополнительно содержит приемо-индикатор, блок дифференцирования, два интегратора, два сумматора и два множителя, к первому входу первого множителя подключен выход датчика угла перекладки руля, к второму входу первого множителя подключен первый выход приемо-индикатора, выход первого множителя подключен к первому и второму входам второго множителя, выход которого подключен к первым входам первого и второго интеграторов, выход второго интегратора подключен к своему второму входу и через первый сумматор соединен со своим третьим входом, четвертый вход второго интегратора соединен с выходом первого интегратора и через второй сумматор - с вторым входом первого интегратора, третий вход которого соединен с его выходом, а четвертый вход - с выходом второго интегратора, вторые входы первого и второго сумматоров соединены соответственно с выходом блока выработки скорости и выходом блока дифференцирования, второй выход приемо-индикатора подключен к второму входу блока выработки скорости и третьему входу суммирующего усилителя, третий выход приемо-индикатора подключен к входу блока дифференцирования и четвертому входу суммирующего усилителя, к пятому и шестому входам которого подключены выходы соответственно первого и второго интеграторов.
| Устройство управления движением судна | 1981 |
|
SU979204A1 |
| Предохранительный элемент устройства для скрепления стопы строительных изделий, имеющих форму рамы | 1989 |
|
SU1654143A1 |
| Устройство для управления движением судна | 1983 |
|
SU1150155A1 |
